Изобретение относится к машиностроению, в частности к автооператорг1М для обслуживания автоматических линий, для выполнения загрузочно-разгрузочных работ.
Известен автооператор, содержащий силовой цилиндр, шток которого связан с траверсой, на которой размещены захватные рычаги, управляемые приводом, выполненньал в виде храпового механизма, размещенного между траверсой и копирньал устройством, выполненным в виде пб)Офильного кулач,jca 13.
Недостатком известного автооператора является то, что он обладает низкой надежностью.
Целью изобретения является повышение надежности.Цель достигается тем, что автоoneparoip, содержащий силовой цилиндр шток которого связан с траверсой, на которой размещены захватные рычаги, управляемые приводом, выполненны в виде храпового механизма, размещенного между траверсой и копирным устройством, выполненным в виде профильного кулачка, снабжен несамотормозящейся винтовой парой, гайка которой жестко закреплена на штоке силового цилиндра, а храповой механизм выполней в виде втулки с лопастями и храповика, при этом лопасти втулки расположены с возможностью взаимодействия с зубьями храповика, а последний жестко связан с профильнь кулачком, кроме того, втулка с лопастями храпового механизма закреплена на вите несамотормозящейся винтовой пары. На фнг. 1 - схематически изображен предлагаемый автооператор, общий вид,- на фиг. 2 - разрез А-А на фиг. 1 ка фиг. 3 - профиль храповика в пазвернутом виде.
Автооператор содержит корпус 1, на котором закреплен гидродилиндр 2. Гидроцилиндр штоком 3 связан с траверсой 4. К траверсе прикреплены две направляющие скалки 5, воспринимающие все перекосы. Шток 3 связан с траверсой 4 через шарнирное соединение 6. На конце штока 3 жестко прикреплена многозаходная несамотормозящаяся гайка 7i Внутри траверсы 4 соосно с гидроцилиндром 2 установлен храповик 8, представляющий собой втулку с четырьмя зубьями 9, расположенными в плоскости, перпендикулярной оси гидроцилиндра 2 под углом 90 друг к другу. Зубья храповика взаимодействуют с двухлопастной втулкой 10, расположенной на многоэаходном винте 11, взаимосвязанном с гайкой 7. Втулка 10 подпружинена к винту 11 пружиной 12, связана с винтом 11 штифтом 13 и может перемещаться в вертикальном
направлении по пазу 14, К храповику 8 с другой стороны по отношению зубьев 9 жестко закреплен профильный кулачок 15. Профиль кулачка расположен в плоскости., перпендикулярной оси гидроцилиндра 2. В траверсе 4 имеютс оси 16, на которых расположены захваты 17. Захваты подпружинены пружинами 18. На подпружиненных концах захватов, имеются ролики 19, взаимодействующие с кулачком 15. В нижней части траверсы 4 имеются упоры 20, а в верхней части - упог 21, ограничивающий ход штока цилиндра вниз при раскрытии захватов.
Автооператор работает следующим образом.
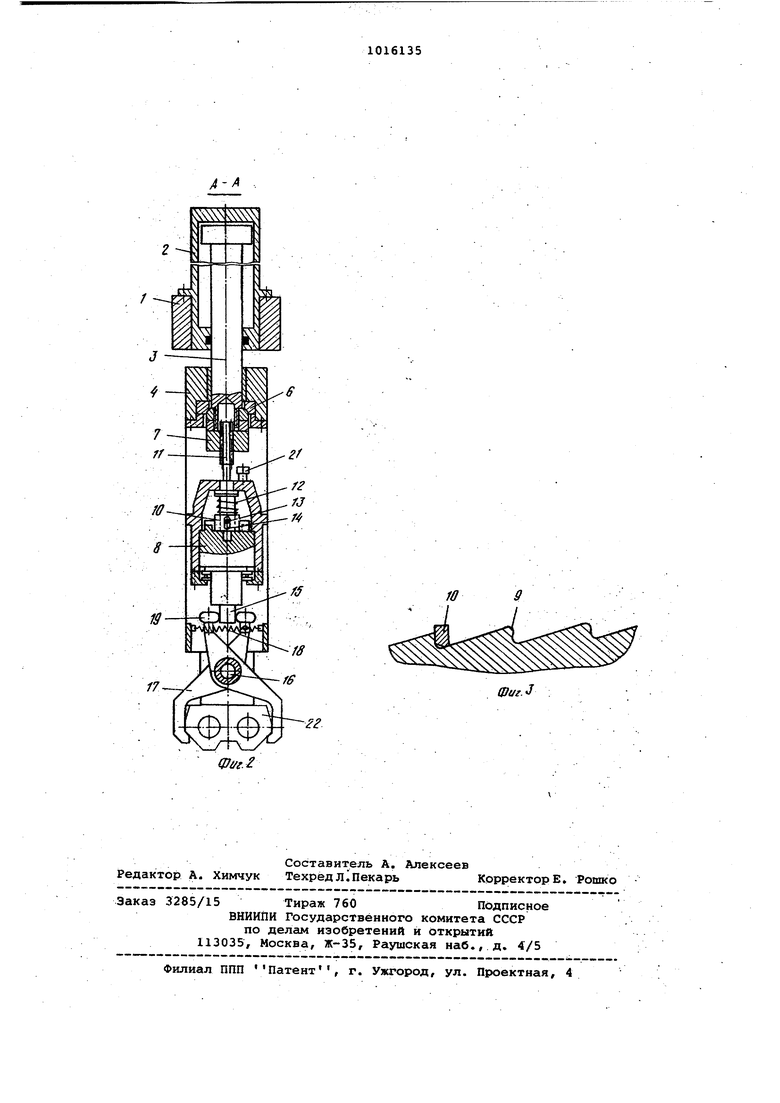
Исходное положение (фиг. 2) - автооператор находится в верхнем положении, деталь 22 - в захватах. Надо положить деталь (предположим, на С7ГОЛ). Масло подается в поршневую полость гидроцилиндра 2. Поршень, Ш7:ок 3 и траЕерса 4 перемеща бтся вниз до упора деталью 22 в стол (не показан), при этом траверса 4 останавливается, а шток 3 с гайкой 7 продолжают двигаться вниз до соприкосновения с упором 21. Винт 11 поворачивается, лопастная втулка 10 поворачивает храповик 8 и кулачок 15 на 90°. Захваты 17 разжимаются, деталь 22 освобождается. После этого масло подается в штоковую полость гидродилиняра 2. Шток 3 перемещается Еверх, винт 11 поворачивается в обратную сторону, а лопасти втулки 3.0, сжимая пружину 12, движутся по криволинейной поверхности (фиг. 3) храповика 8 и заскакивают за следующий зуб храповика не поворачивая его. Захваты 17 остаются открытыми.После этого начинает подниматься траверса 4. Далее необходимо захватить , Автооператор идет вниз. Траверса 4 упорами 20 упирается в деталь 22 и останавливается. Шток 3 с гайкой 7 продолжает движение вниз. Винт 11 яоворачивается вместе с втулкой 10, ее лопасти взаимодействуют с зубьями храповика 8 и поворачивают его и кулачок 15 на угол 90. Захваты 17 под действием пружин 18 сводятся и зажимают деталь 22. Масло падается Б штоковую полость гидроцилкидра 2, шток 3 идет вверх, винт 11 поворачива-ется в противоположную, сторону, лопасти втулки 10 заскакивают за следующий зуб храповика 8. После этого траверса 4 перемещается вверх, деталь 22 зажата в захватах 17.
Использование предлагаемого изоб |етения позволяет увеличить надежность и долговечность автооператора за счет расположения всех деталей в оси действия силового цилиндра.
Фиг. J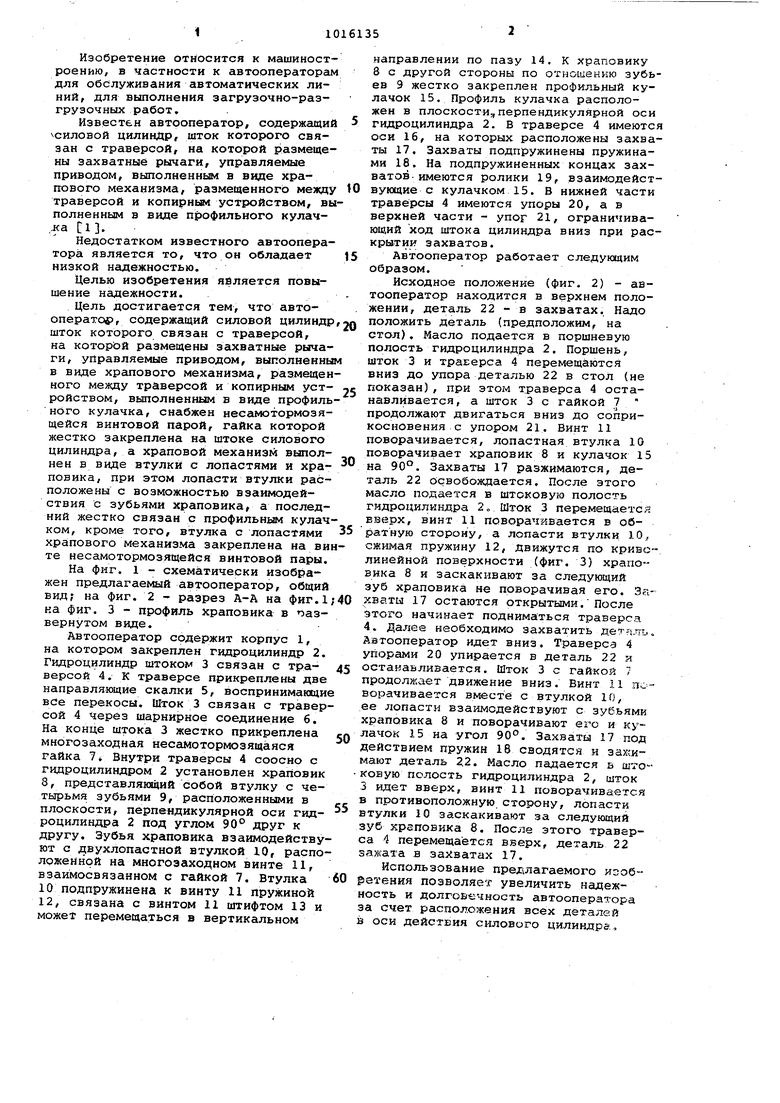
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1975 |
|
SU520225A1 |
| Устройство для продольной прокатки цилиндрических изделий | 1975 |
|
SU602278A1 |
| Устройство для автоматической смены кулачков зажимного патрона | 1985 |
|
SU1263437A1 |
| Автооператор | 1983 |
|
SU1144842A2 |
| РОТОРНАЯ МАШИНА | 1970 |
|
SU265677A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для подачи заготовок в зону обработки | 1981 |
|
SU1091968A1 |
| Станок для продольной прокатки | 1975 |
|
SU572323A1 |
| Автооператор | 1980 |
|
SU891328A1 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ОБУВИ | 1968 |
|
SU232057A1 |
АВТООПЕРАТОР, содержащий силовой цилиндр, цггок которого связ с траверсой, на которой размещены эахвдтные рычаги, управляемые привддом, выполненньо 1 в виде храпового Механизма, размещенного между траве сой и копирным устройством, выполне ным в виде профильного кулачка, о т- . личающий.с я тем, что, с целью повышения нсшежности, он снабжен несамотормозящейся винтовой Парой, гайка которой жестко закреплена на штоке силового цилиндра, а храповой механизм выполнен в виде втулки с лопастями храповика, при этом лопасти втулки расположены с возможностью взаимодействия с зубьями храповика, а последний жестко связан с профильным кулачком, кроме того, втулка храпового механизма закреплена на винте несамотормозящейся винтовой пары. ... ; - О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автооператор | 1975 |
|
SU520225A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
