town
№ 18
(jazomofffca Siltna/iKuSomeaif
ы
i|0
|Јь
:
Изобретение относится к обработке металлов давлением и может быть использовано вкузнечно-штамповочном производстве.
Известно устройство для транспортировки заготовок, содержащее хобот с нижним захватом, а также силовой цилиндр, установленный на станине. Нижний захват выполнен в виде вил, которые при выгрузке входят под заготовку.
Однако при аварийной ситуации, в результате которой заготовка может свалиться с вил, необходимо на корпус захвата устанавливать дополнительный аварийный манипулятор, рабочий орган которого представляет собой рычаг, выполненный в виде вилки с загнутыми концами.
Недостатком данного устройства является низкая надежность при выгрузке заготовок из-за отсутствия верхнего захвата и низкая производительность из-за невозможности избежать аварийных ситуаций, связанных с опрокидыванием заготовки.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для подачи заготовок в зону обработки, содержащее хобот с верхним и нижним захватами, а также силовой цилиндр привода, установленный на станине.
Недостатком известного устройства является ограничение технологических возможностей из-за того, что устройство предназначенотолько для подачи заготовок в зону обработки, а также из-за необходимости замены верхнего и нижнего захватов с профилированной рабочей поверхностью при захвате заготовок других размеров. Низкая эксплуатационная возможность известного устройства также заключается в том, что, при внезапном прекращении подачи в него энергоносителя, заготовка может выпасть из нижнего захвата.
Цель изобретения - расширение эксплуатационных возможностей за счет обеспечения функционирования устройства как при подаче заготовок в зону обработки, так и удаления из нее, а также повышение эксплуатационной возможности за счет исключения возможности выпадания заготовок из средства захвата при прекращении подачи в него энергоносителя.
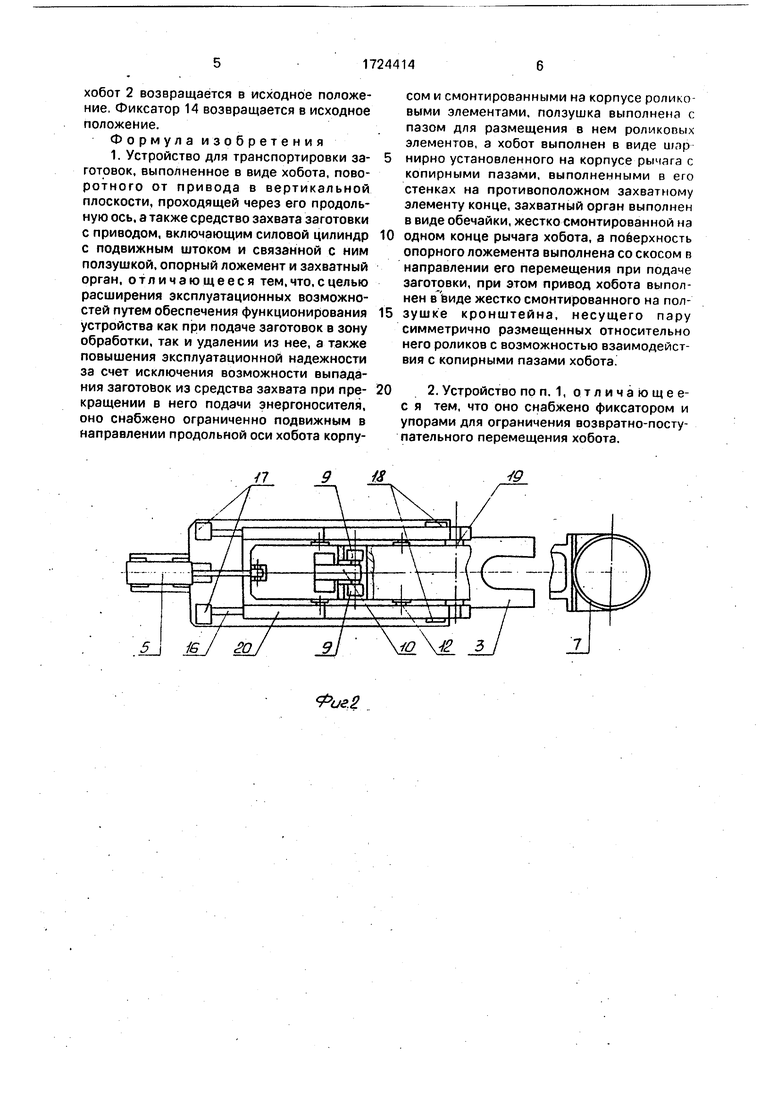
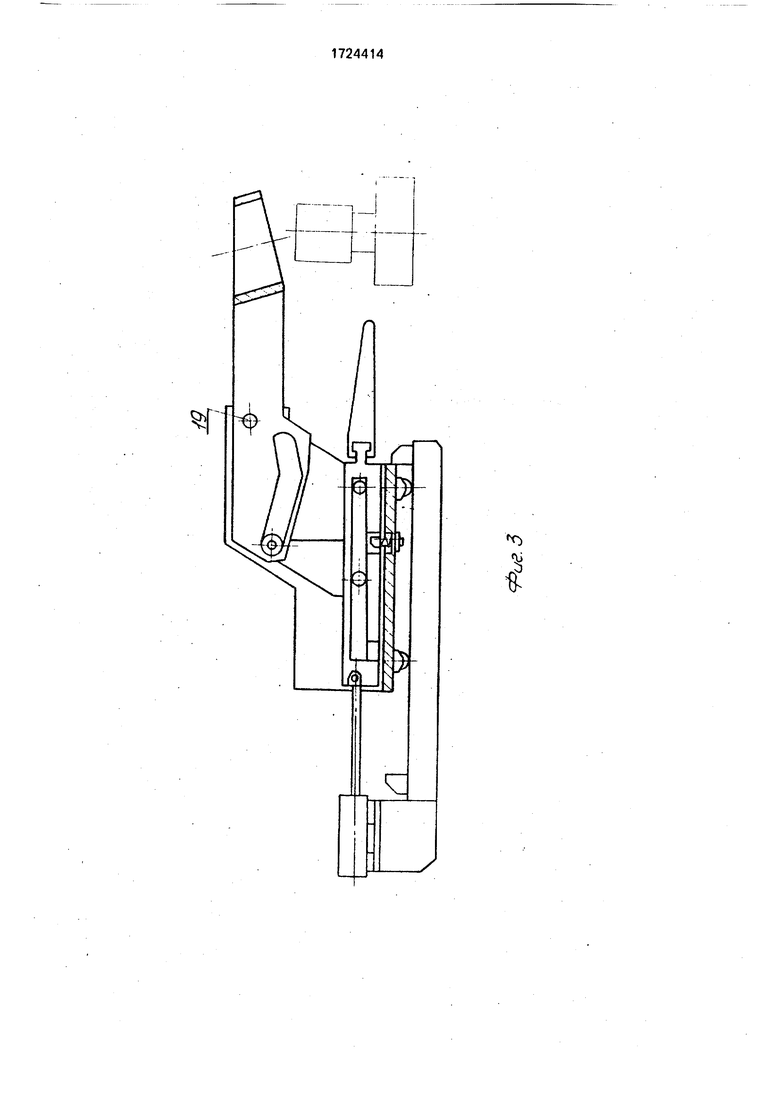
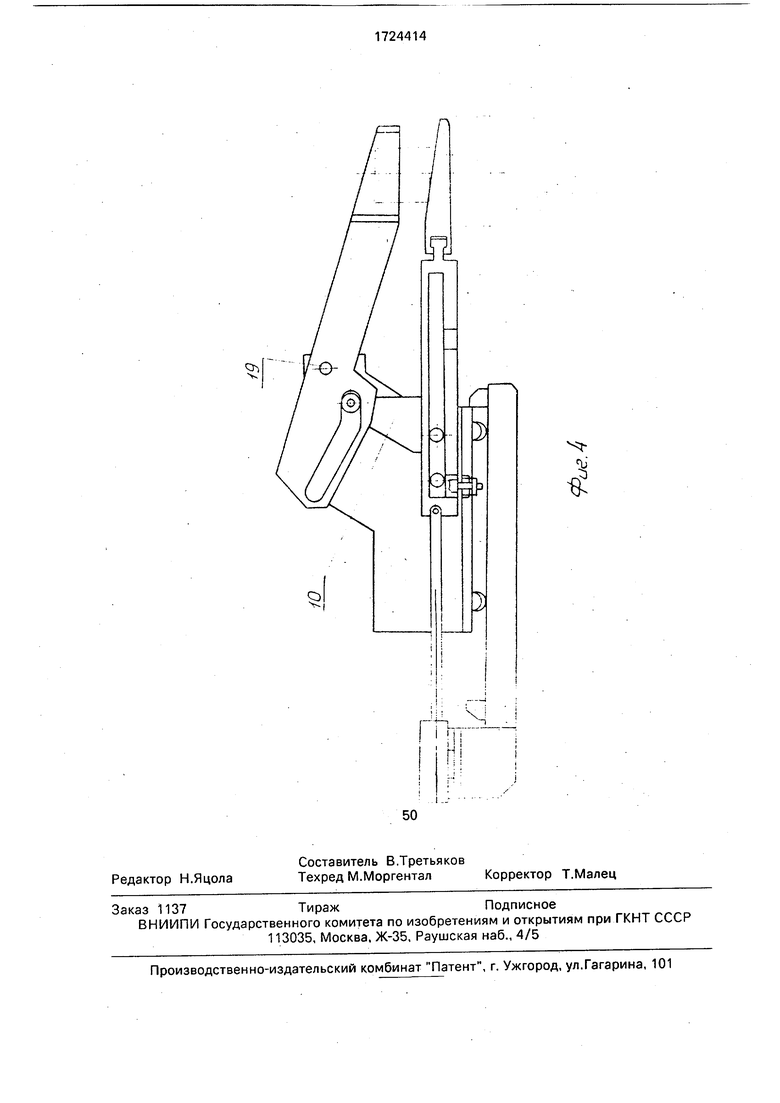
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 и 4 - начало и конец работы привода поворота хобота.
Устройство для транспортировки заготовок состоит из станины 1, на которой находится хобот 2, средство 3 захвата с приводом от силового цилиндра 4. Хобот 2
представляет собой рычаг, захватный орган
5которого выполнен в виде обечайки, жестко смонтированной на рычаге, а на противоположном конце рычага находятся
копирные пазы 6, в которых устанавливаются ролики 7, смонтированные на кронштейне 8. Хобот 2 выполнен с возможностью поворота относительно оси 9 закрепленной на корпусе 10. На последнем смонтированы
0 ролики 11, являющиеся направляющими при перемещении средства 3 захвата, которое состоит из ползушки 12 с продольными пазами под направляющие ролики 11 и опорного ложемента 13, поверхность кото5 рого выполнена со скосом в направлении его перемещения при подаче заготовки. Опорный ложемент соединен с ползушкой 12 Т-образным пазом. На ползушке 12 установлен кронштейн 8. На корпусе 10 установ0 лен утапливающийся фиксатор 14, а на станине установлены упоры 15 и 16 для ограничения возвратно-поступательного перемещения корпуса 10.
Устройство работает следующим обра5 зом.
Включением силового цилиндра 4 приводят в движение корпус 10с хоботом 2 и средством 3 захвата. Корпус 10 перемещается по станине 1 до жесткого упора 16, при
0 этом захватный орган 5 хобота 2 устанавливается над заготовкой.
Фиксатор 14 утапливается и с помощью цилиндра 4 продолжается движение ползушки 12 по направляющим роликам 11 в
5 зону обработки, при этом ролики 7 кронштейна 8 перемещаются по копирным пазам
6хобота и тем самым поворачивают хобот относительно оси 9, закрепленной на корпусе 10, захватный орган 5 опускается, охва0 тывая заготовку. Средство захвата 3 перемещается под заготовку так, что выталкиватель штампа оказывается в пазу опорного ложемента 13, при этой своей скошенной поверхностью опорный ложе5 мент отрывает заготовку от выталкивателя штампа, выталкиватель опускается, а заготовка остается лежать на опорном ложементе. В конце хода средства 3 захвата фиксатор 14 устанавливается в исходное по0 ложение.
Силовой цилиндр 4 включают в обратном направлении. При этом корпус 10 перемещается по станине 1 до жесткого упора 15 и заготовка выгружается из зоны обработки.
5 Заготовка грузоподъемным средством снимается с опорного ложемента 13, фиксатор 14 утапливается и с помощью силового цилиндра 4 средство 3 захвата возвращается в исходное положение, при этом кронштейном 8 через ролики 7 и копирные пазы 6
хобот 2 возвращается в исходное положение. Фиксатор 14 возвращается в исходное положение.
Формула из обретения 1. Устройство для транспортировки заготовок, выполненное в виде хобота, поворотного от привода в вертикальной плоскости, проходящей через его продольную ось. а также средство захвата заготовки с приводом, включающим силовой цилиндр с подвижным штоком и связанной с ним ползушкой, опорный ложемент и захватный орган, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения функционирования устройства как при подаче заготовок в зону обработки, так и удалении из нее, а также повышения эксплуатационной надежности за счет исключения возможности выпадания заготовок из средства захвата при прекращении в него подачи энергоносителя, оно снабжено ограниченно подвижным в направлении продольной оси хобота корпусом и смонтированными на корпусе роликовыми элементами, ползушка выполнена с пазом для размещения в нем роликовых элементов, а хобот выполнен в виде шар
5 нирно установленного на корпусе рычага с копирными пазами, выполненными в его стенках на противоположном захватному элементу конце, захватный орган выполнен в виде обечайки, жестко смонтированной на
0 одном конце рычага хобота, а поверхность опорного ложемента выполнена со скосом в направлении его перемещения при подаче заготовки, при этом привод хобота выполнен вПвиде жестко смонтированного на пол5 зушке кронштейна, несущего пару симметрично размещенных относительно него роликов с возможностью взаимодействия с копирными пазами хобота.
0 2. Устройство по п. 1, отличающее- с я тем, что оно снабжено фиксатором и упорами для ограничения возвратно-поступательного перемещения хобота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Устройство для подачи заготовок в зону обработки | 1985 |
|
SU1243868A1 |
| Устройство для подачи листа в зону обработки | 1985 |
|
SU1357108A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1987 |
|
SU1416242A1 |
| Установка для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1442300A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Устройство для подачи стержневых заготовок | 1987 |
|
SU1532160A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
Использование: при обработке металлов давлением. .Сущность изобретения: включением цилиндра 4 приводят в движение корпус 10 с хоботом 2 и средством 3 захвата, который перемещается по станине 1 до упора 16, при этом захватный орган 5 хобота устанавливается над заготовкой. Фиксатор 14 утапливается и с помощью цилиндра 4 продолжается движение пол- зушки 12 в зону обработки, при этом ролики 7 кронштейна 8 перемещаются по копир- ным пазам 6 хобота и тем самым поворачи- вают хобот относительно оси 9, закрепленной на корпусе 10, захватный орган 5 опускается, охватывая заготовку, опорный ложемент 13 перемещается под заготовку и своей скошенной поверхностью отрывает заготовку от выталкивателя штампа. Выталкиватель опускается, а заготовка остается лежать на опорном ложементе. Фиксатор устанавливается в исходное положение. Силовой цилиндр включается в обратном направлении, заготовка снимается грузоподъемным устройством с опорного ложемента и все механизмы возвращаются в исходное положение. 1 з.п. ф-лы, 4 ил. Ј
Риг.2
| Устройство для подачи заготовок | 1977 |
|
SU626873A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
