Известные устройства для доводки желобов колец шарикаподшипников обладают тем недостатком, чтО они, во-первых, не совмещают вращательвое и колебательное движения притира и, во-вторых, не допускают автоматическую смену колец, что препятствует полной автоматизации линии изготовления колец шарикоподшипников.
Отличительной особенностью предложенного механизма, свободного от указанных недостатков, является его конструктивное выполнение.
С целью осуществления вращательного и колебателвноГо движений самозатачивающегося притира, механизм выполнен в виде «ачаюшейся вокруг вертикального шиинделя головки, снабженной горизонтально расположенным шпинделем; последний шарнирно сочленен с приводным валом и кинематически связан с поводком ояравки притира, самоцентрирующегося по желобу, ось которого совмещена с осью вертикального шпинделя.
С целью автоматизации подачи притира ,в осевом и радиальном направлениях при смене колец шарикоподшипников, вертикальный шпин.дель качающейся головки выполяеи
польпм и внутри его расположен подвижной шток, снабженный коническим отверстием, взаимодействующим с шаровым наконечником кронштейна, осуществляющего радиальное перемещение Нритира, а торец штока взаимодействует с рычагом поводка притира для осуществления его аксиального паремещения.
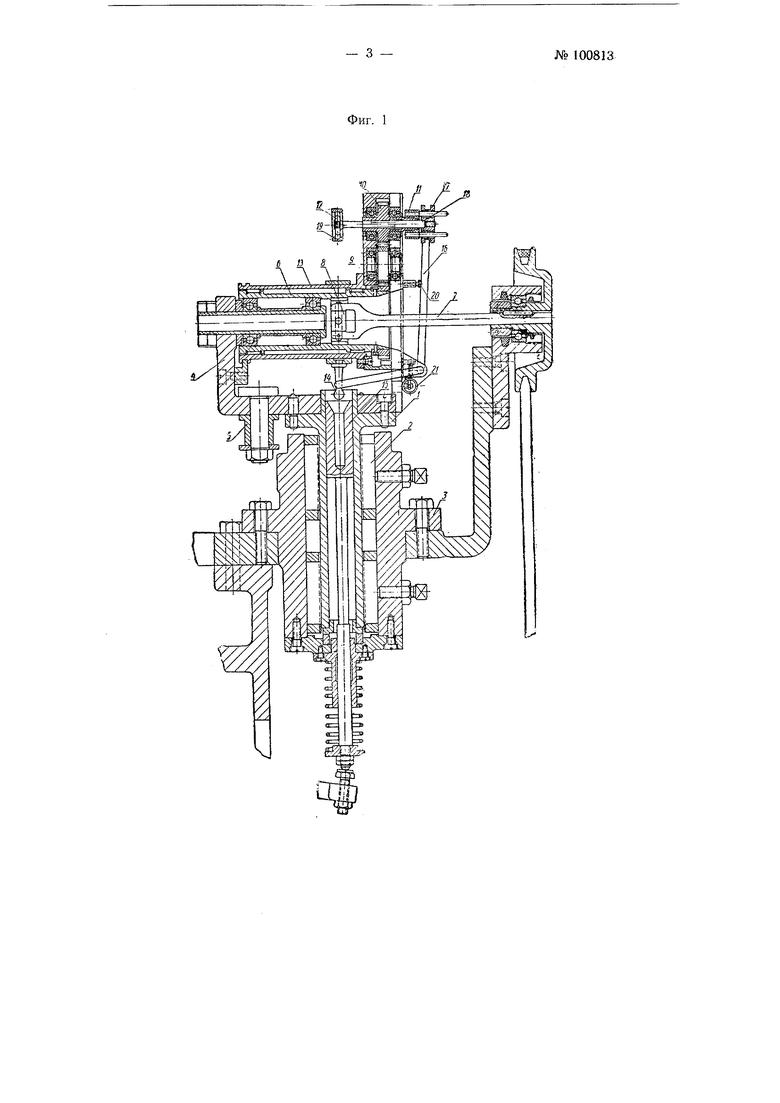
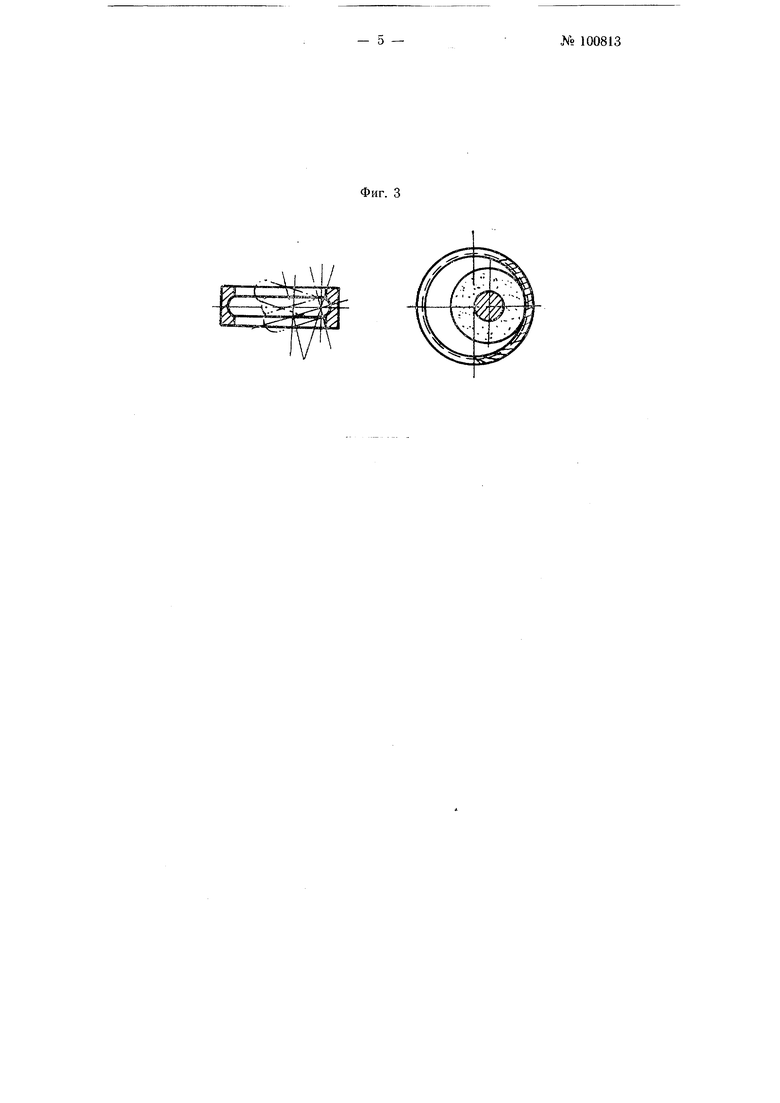
На фиг. 1 изображен предложенный механизм в разрезе; на фиг. 2- вид на механизм сбоку (приводной шкив и его кронштейн условно не показаны); на фиг. 3 изображено положение притира относительно желоба В процеоса притирки.
Полый вертикальный шпиндель /, расположенный в подшипнике 2, неподвижно укрепленном в корпусе 3, несет качающуюся головку 4, снабженную втулкой 5. В качающейся головке расположен горизонтальный шпиндель 6, сочлененный с валом 7 через шарнирную связь 8. На горизонтальный шпиндель насажен зубчатый венед Я кинематически сочлененный с шестерней 10 поводка // притира 12.
Горизонтальный шпиндель 6 монтирован в подвижном кронштейне 13, снабженном шаровым наконечником, 14, взаимодействующим с коническим, переходящим в цилиндрическое отверстием подвижного штока 15. Торец штока 15 взаимодействует с |рычагом 16, сочлененным с водилом 17, в котором укреплена ооравка 18 притира 12.
Кольцо 19 шарикоподшипника устанавливают так, чтобы ось желоба совпадала с осью вертикального шпинделя; при этом перемещение притира 12 в аксиальном направлении ограничено упором 20, взаимодействующим с рычагом 16, а перемещение притира 12 в радиальном направлении до упора с желобом осуществляется пружийой 21.
Работа механизма осуществляется следующим образом.
Вращательное движение притиру 12 сообщается приводным валом 7 через шарнирную связь 8, шпиндель 6, зубчатый венец 9, шестерню 10, поводок 11, ВОДИЛО 77 и Оправку 18. Колебательное движение притиру 12 сообщается качающейся головкой 4, приводимой в качательное движение от внещнего источника через втулку 5. Так как осевая плоскость желоба совпадает с осью вертикального щпинделя качающейся головки, а центр желоба (в горизонтальном сечении кольца) также совмещен с осью вертикального шпинделя качающейся голощки,то притир получает колебательное движение вокруг центра желоба. Притир 12 выполнен самозатачивающимся. При уменьшении диаметра притира пружина 21 поджимает его к желобу и процесс притирки ненарущается. В случае необходимости замены притира 12 он снимается вместе с оправкой 18.
Для осуществления снятия готового кольца и установки заготовки необходимо отвести притир от желоба в радиальном направлении и вслед за этим - в горизонтальном направлении. Эти операции осуществляются подвижным штоком 15. При подъеме штока 15 шаровой након1ечник 14, скользя по образующей конуса, поворачивает подвижной кронштейн 13, что приводит к перемещению притира 12 в радиальном направлении. Последующий -подъем штока 15 приводит к взаимодействию его торца с рычагом /5;.который поворачивается и опводит водило 17 вместе с опранкой
18 притира 12 в аксиальном направлении.
После смены колец шток начнет опускаться; при этом притир сначала перемещается в аксиальном направлении до упора, а затем подвижной кронштейн 13, после прекращения взаимодействия наконечника 14 с конической поверхностью штока, под действием пружины 21 поворачивается на угол, необходимый для перемещения приткра в радиальном направлении на необходимую величину, т. е. до упора с желобоМ.
Для обеспечения нормального режима работы притира и обеспечения возможности его самоцентрирования по желобу должен быть предусмотрен небольшой, в пределах 0,3- 0,5 мм, зазор между упором 20 и рычагом 16.
Предмет изобретения
1.Механизм для доводки желобов колец шарикоподшипников, отличающийся тем, что, с целью осуществления вращения саМозатачиваюшего-ся профилированного по радиусу желоба кольца притира и его колебательного движения вокруг центра желоба кольца, механизм выполнен в виде качающейся вокруг вертикального шпинделя головки, снабженной горизонтально расположенным шпинделем, шарнирно сочлененным с приводным валом и кинематически связанным с поводком оправки притира, самоцентрирующегося по желобу, ось которого совмещена с осью вертикального шпинделя.
2.Механизм ПО п. 1, о тл и ч аЮщ и и с я тем, что, с целью автоматизации подачи притира в осевом и радиальном направлении при смене колец шарикоподшипников, вертикальный шпиндель качающейся головки выполнен полыМ и внутри его расположен подвижной шток, снабженный коническим, переходящим в цилиндрическое отверстием, взаимодействующим с шаровым на коне4ником кронштейна, осуще ствляющего радиальное перемещение притира, а торец штока взаимодействует с поворотным рычагом, сочлененным с ры. чагом поводка притира, для осуществления аксиального перемещения притира.