Изобретение относится к области сельскохозяйственного машиностроения в. частности к системам автоматическо регулировки загрузки рабочих органов самоходных уборочных машин. Известно автоматическое устройств регулирования загрузки молотильного аппарата самоходной уборочной машины содержащее датчик загрузки сервомеха низм регулирования скорости движения уборочной маыины ij . Недостатком известного устройства является значительное время транспор ного запаздывания, т, е. запаздывани управляющего воздействия от датчика загрузки к сервомеханизму регулирова НИН скорости движения самоходной убо рочной машины, в результате чего воз можно поступление в машину хлебной массы в количестве, npsBHUjaroineM критическую загрузку, вызывающее забива ние ее молотильного аппарата. Цель изобретения - предотвращение забивания молотильного аппарата путем автоматического снижения скорости движения самоходной уборочной машины перед скоплением хлебной массы в подбираемом валке. Поставленная цель достигается .. . за счет того, что устройство снабжено дополнительным датчиком заг рузки, ко торый установлен перед уборочной машиной для взаимодействия с валом, пороговьИл элементо - с задатчиком порогового напряжения, инвертором и ло гическим элементогч И,причем выход дополнительного датчика соединен с входом порогового элемента, выход которого подключен к входу инвертора и входу сервомеханизма регулирования скорости движения уборочной машины, при этом выход инвертора и выход датчика загрузки молотильного аппарата соединены соответственно с первьм и вторым входами логического элемента И, выход которого соединен с входом сервомеханизма регулирования ско: рости движения самоходной уборочной машины. На чертеже изображена функциональная схема устройства. Автоматическое устройство для предотвращения забивания молотильного аппарата самоходной уборочной машины состоит из датчика 1 загрузки молотильного барабана, дополнительного датчика 2 с чувствительньт1 3 и преобразующим 4 элементами, установленного перед самоходной уборочной машиной, порогового элемента 5, инвертора 6, логического элемента И 7 и сервомеханизма 8 регулирования скорости движеВ1ИЯ машины, причем выход дополнитель.ного датчика 2 соединен с входом порогового элемента 5, выход которого подключен к входу инвертора 6 и входу сервомеханизма 8 системы регулирования скорости движения мгш1ины, при этом выход инвертора 6 и выход датчика 1 загрузки молотильного аппарата соединен соответственно с первьпч и BToptJM входами логического элемента И 7, выход которого соединен с входом сервомеханизма 8 регулирования скорости движения самоход Юй уборочной машины. Работает устройство следую1чим образом. Самоходная уборочная машина с установленным впереди нее дополнительным датчиком 2 двигается по полю вдоль подбираемого валка. При этом чувствительный элемент 3 дополнительного датчика 2 взаимодействует с поверхностью валка, преобразующий элемент 4 выдает информацию о высоте валка на поооговый элемент 5. При естественных колебаниях поверхности валка на выходе сигнал относительно мал, не превьтает порога срабатывания, задаваемого согласно конкретным условиям уборки задатчиком порогового элемента 5. При этом скорость уборочной машины регулируется регулятором загрузки по сигналам датчика 1, которые беспрепятственно проходят через логический элемент И 7 на- сервомеханизм 8, ввиду того, что , на втором входе элемента И 7 имеется сигнал от инвертора 6. При нарушениях структуры валка в виде скоплений хлебной массы выходной сигнал датчика 2 превысит по величине порог, выставленный задатчиком порогового элемента 5 и релейно воздействует на сервомеханизм 8 в сторону снижения скорости уборочной машины. При подходе уборочной машины к скоплению хлебной массы ее скорость своевременно понизится, что приведет к уменьшению подачи массы в молотилку и автоматическому предотвращению ее забивания. Одновременно сигнал с порогового элемента 5 подается на инвертор 6, вследствие чего на втором входе логического элемента И 7 сигнала не будет и. сигнал от датчика загрузки 1 не поступает на сервомеханизм 8, чем исключается алгебраическое сложение этих сигналов. Таким образом, элементами б и 7 обеспечивается приоритет сигналов дополнительного датчика 2 перед сигналами датчика 1 загрузки молотильного аппарата. Как только структура валка восстановится , выходной сигнал с дополнительного датчика 2 станет меньше выставленного порога срабатЕшания порогового элемента 5 и на выходе последнего сигнала исчезнет. Однако-, на втором входе элемента Н 7 с выхода инвертора б появится сигнал, в результате чего датчика загрузки
3 .10.093184
молотильного аппарата 1 проходят че-щение забиваний молотилки, что суще
реэ элемент. 7 и управляют сервомеха-ствеано сокраг ает количество и пронизмом 8 скорости движения самоходнойдолжительность простоев снабженных
уборочной машины.регуляторами загрузки агрегатов, а
Предложенное устройство обеспечи-следовательно, повышает производительвает по сравнению с и: вестными устг 5ность и снижает, потери зерна при уборройствами автоматическое предотвра-ке урожая.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор загрузки рабочих органов уборочных сельскохозяйственных машин | 1983 |
|
SU1134132A1 |
| Устройство для автоматического вождения самоходного комбайна вдоль подбираемого валка | 1981 |
|
SU988213A1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312485C2 |
| Устройство для автоматического регулирования загрузки самоходной уборочной машины | 1985 |
|
SU1412638A1 |
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1981 |
|
SU959682A1 |
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1976 |
|
SU745417A1 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| Способ автоматического контроля и регулирования подачи массы в комбайн | 1972 |
|
SU484833A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| УБОРОЧНЫЙ КОМПЛЕКС | 2012 |
|
RU2569566C2 |
АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАК5ЕНИЯ ЗАБИВАНИЯ МОЛОТИЛЬНОГО АППАРАТА САПОХОДНОЙ УБОРОЧНОЙ МАШИНЫ, содержащее датчик эагруэ;ки молотильного аппарата и сервомеханизм регулирования скорости движения уборочной машины, отличающееся тем, что, с целью предотвраще.ния забивания молотильного аппарата путем автоматического снижения скорости движения мамины перед скоплением хлебной массы в подбираемом валке. устройство снабжено дополнительным датчиком загрузки, который установлен перед уборочной мшйиной для взаш юдействия с валк9м, пороговым элементом р, задатчиком порогового напряжения, инвертором и логическим элементом Н, причем выход дополнительного датчика; соединен с|входом порогового элемента, выход которого подкл юч:ен к входу инвертора и входу сервомеханизма регулирования скорости двюхения уборочной мйыины, при этом выход инвертора и выгсод датчика загрузки мрлотильного аппарата соединены соответ-. ственно с первым и вторым входами . лигического элемента И, выход которого соединен с входом сервомеханизма регулирования скорости движения само-и (Л ходной уборочной машины. . , CD 00 ff 00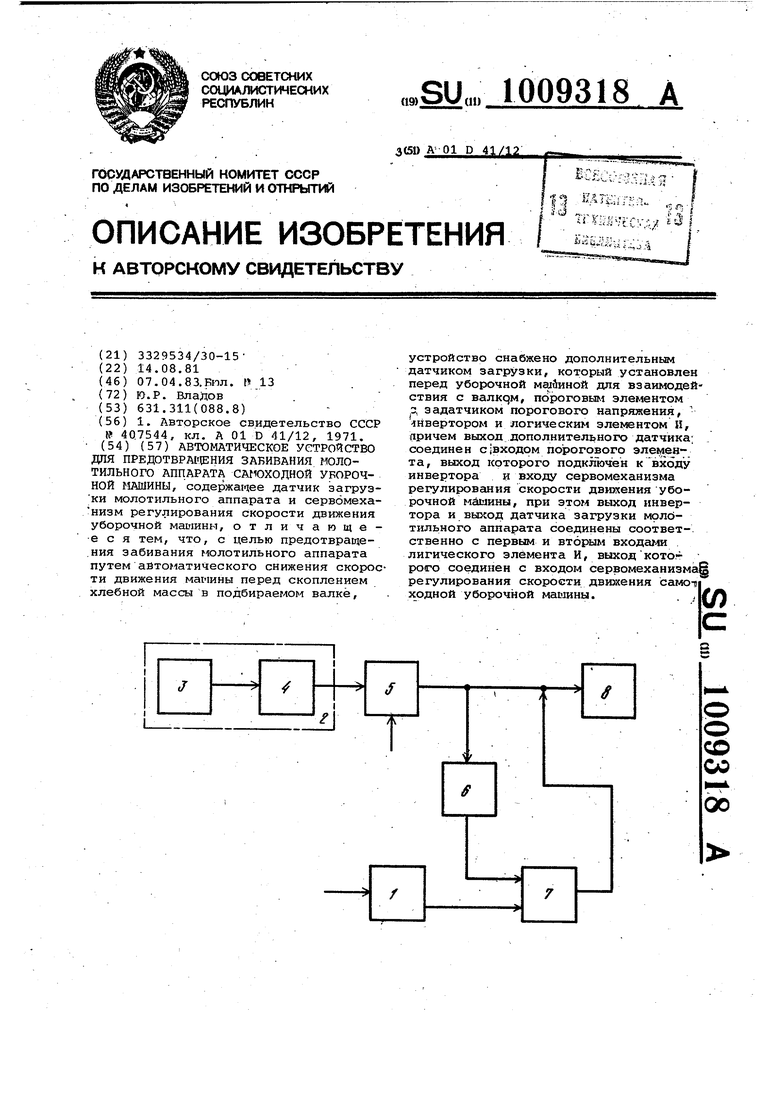
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
