Изобретение относится к устройствам для стабилизации горизонтального положения платформы транспортного средства относительно излучателей сейсмических колебаний, установленных на платформе.
Известно устройство для стабилизации горизонтального положения платформы транспортного средства, содержащее маятниковый датчик углов наклона, имеющий отвес с пазами для взаимодействия с толкателями органов управления исполнительными гидроцилиндрами выносных опор, которые сообщены с силовой гидромагистралью, и ручной привод управления отвесом 1.
Недостатками извесного устройства являются сложность конструкции и управления устройством, связанные с тем, что для обеспечения подъема и опускания платформы транспортного средства дополнительно к датчику углов наклона вводится двухпозиционный гидрораспределитель, управляемый вручную.
Целью изобретения является упрощение конструкции и управления устройством.
Указанная цель достигается тем, что в устройстве для стабилизации горизонтального положения платформы транспортного средства, содержащем маятниковый датчик углов наклона, имеющий отвес с пазами для взаимодействия с толкателями органов управления исполнительными гидроцилиндрами выносных опор, которые сообщены с силовой гидромагистралью, и ручной привод управления отвесом, пазы выполнены наклонными к продольной оси отвеса, смонтированного с возможностью вертикального перемещения ручным приводом, который снабжен фиксатором положения отвеса в вертикальной плоскости.
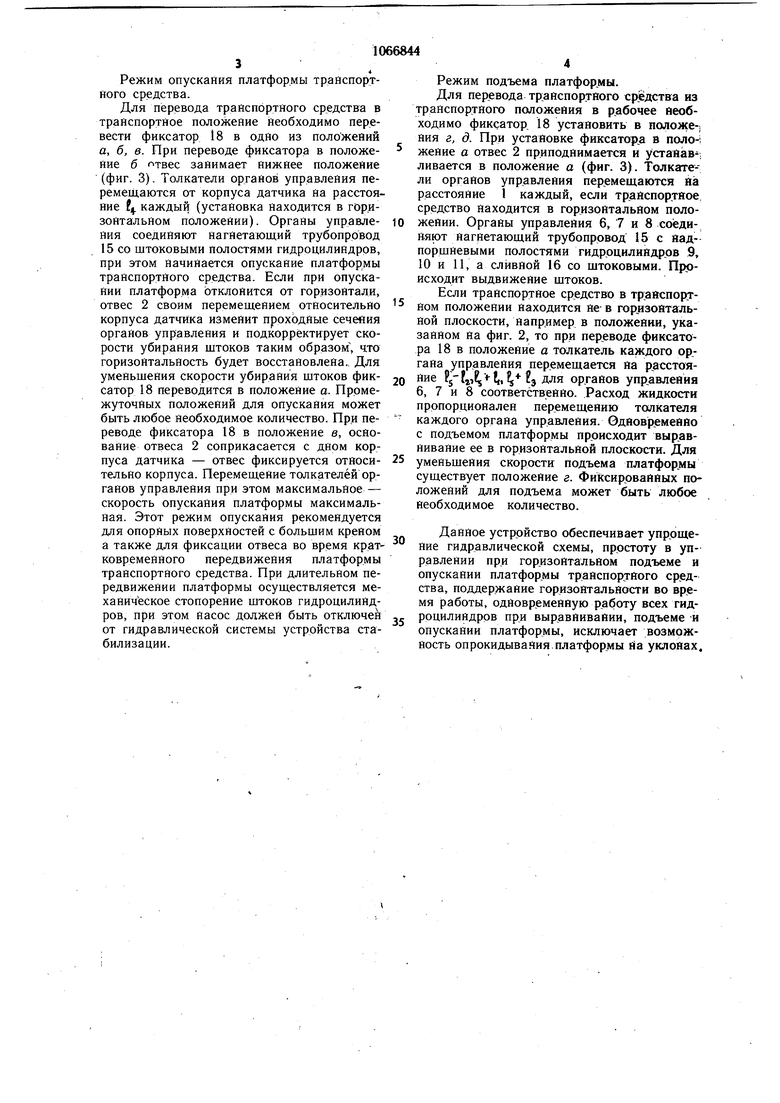
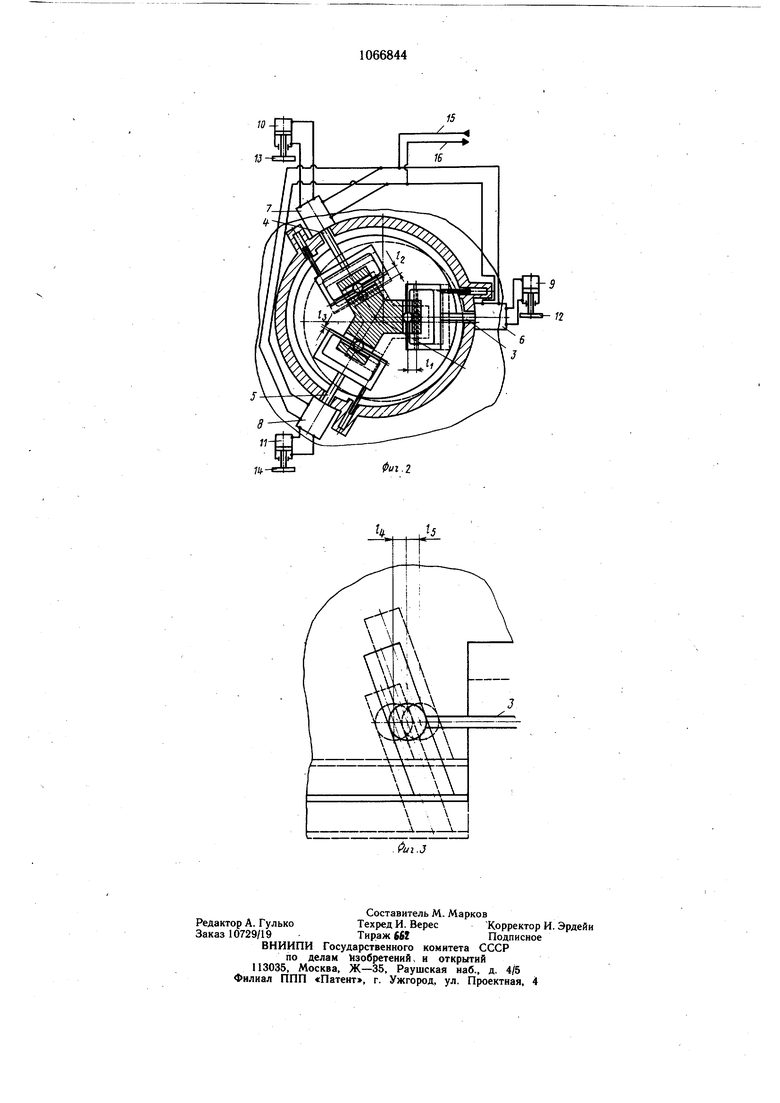
На фиг. 1 изображен маятниковый датчик углов, наклона, продольный разрез; на фиг. 2 - принципиальная схема предложенного устройства, в плане; на фиг. 3 - схема положений отвеса и толкателя при приведеНИИ установки в рабочее (верхнее) и транспортное (нижнее) положения.
Устройство для стабилизации горизонтального положения платформы транспортного средства содержит маятниковый датчик углов наклона 1, который имеет отвес 2 с выполненными в нем пазами. Пазы., в свою очередь, взаимодействуют с толкателями 3, 4, и 5 органов управления 6, 7 и 8 исполнительными гидроцилиндрами 9, 10 и 11 выносных опор 12, 13 и 14. Исполните шные гидроцилиндры через органы управления ими сообщены с трубопроводами 15 и 16 силовой гидромагистрали. Устройство также содержит ручной привод 17, снабженный фиксатором 18 положения отвеса в вертикальной плоскости. Отвес 2 имеет возможность вертикального перемещения.
а пазы выполнены в нем под углом У к продольной оси. Для уменьщения трения в точке контакта толкателя с поверхностью паза и демпфирования колебаний отвеса нижняя часть последнего помещена в масляную ванну.
Устройство для стабилизации роризонтального положения платформы транспортного средства работает в следующих режимах.
Режим стабилизации горизонтального положения платформы транспортного средства.
Во время работы транспортного средства на профиле происходит неравномерное проседание опор 12, 13 и 14 (излучателей сейсмических колебаний) из-за неравномерного уплотнения грунта, имеющего неоднородную структуру под различными опорами. В результате происходит отклонение платформы от горизонтального положения. Вместе с платформой наклоняется корпус маятникового датчика углов наклона 1. Отвес 2 под действием силы тяжести сохраняет вертикальное положение, т.е. можно считать, что перемещается относительно корпуса. Рассмотрим произвольный случай наклона платформы. На фиг. 2 пунктирными линиями показано отклонение отвеса 2 относительно корпуса маятникового датчика. Толкатели 3, 4 и 5 получают различные перемещения , Pj, РЗ как по величине, так и по направлению. Неравенство этих перемещений приводит к различному изменению площадей проходных сечений органов управления 6, 7 и 8, и, следовательно, к изменению расхода жидкости через каждый орган управления. Расход жидкости будет большим через тот орган управления, толкатель которого перемещен на больщее расстояние. Ели перемещение толкателя отрицательное, т.е. от корпуса датчика, то жидкость нагнетается не в надпорщневую полость гидроцилиндров 9, 10 и 11, а в щтоковую. Для случая, изображенного на фиг. 2, жидкость подается в штоковую полость гидроцилиндра 10 и надпорщневые полости гидроцилиндров 9 и 11, но скорость выдвижения штока гидроцилиндра 9 будет больще, чем гидроцилиндра П. Платформа начинает поворачиваться в сторону уменьщения углов наклона вследствии выдвижения штоков гидроцилиндров 9 и 11 и убирания щтока гидроцилиндра 10. Этот процесс продолжается до тех пор, пока все органы управления 6, 7 и 8 не перекроют доступ жидкости в полости гидроцилиндров 9, 10 и 11, т.е. станут в среднее положение. При этом продольная ось корпуса маятникового датчика совмещается с продольной осью отвеса, а значит платформа транспортного средства устанавливается в горизонтальное положение.
Режим опускания платформы трайспортного средства.
Для перевода транспортного средства в транспортное положение необходимо перевести фиксатор 18 в одно из положений а, б, в. При переводе фиксатора в положение б отвес занимает нижнее положение (фиг. 3). Толкатели органов управления перемещаются от корпуса датчика на расстояние f. каждый (установка находится в горизонтальном положении). Органы управления соединяют нагнетающий трубопровод 15 со штоковыми полостями гидроцилиндррв, при этом начинается опускание платформы транспортного средства. Если при опускании платформа отклонится от горизонтали, отвес 2 своим перемещением относительно корпуса датчика изменит проходные сечейия органов управления и подкорректирует скорости убирания штоков таким образом что горизонтальность будет восстановлена., Для уменьщения скорости убирания щтоков фиксатор 18 переводится в положение а. Промежуточных положений для опускания может быть любое необходимое количество. При переводе фиксатора 18 в положение в, основаНие отвеса 2 соприкасается с дном корпуса датчика - отвес фиксируется относительно корпуса. Перемещение толкателей органов управления при этом максимальное - скорость опускания платформы максимальная. Этот режим опускания рекомендуется для опорных поверхностей с больщим креном а также для фиксации отвеса во время кратковременного передвижения платформы транспортного средства. При длительном передвижении платформы осуществляется механическое стопорение щтоков гидроцилиндров, при этом насос должен быть отключен от гидравлической системы устройства стабилизации.
Режим подъема платформы. Для перевода тр:анспортйого средства из транспортного положения в рабочее необходимо фиксатор. 18 установить в положе-: ния г, д. При установке фиксатора в nojio-i
жение а отвес 2 приподнимается и уставав-; ливается в положение а (фиг. 3). Толкате-ли органов управления перемещаются йа расстояние 1 каждый, если трайспортйое средство находится в горизонтальном положении. Органы управления 6, 7 и 8 соединяют нагнетающий трубопровод 15 с йадпорщневыми полостями гидррцилийдррв 9, 10 и 11, а сливной 16 со щтоковыми. Происходит выдвижение щтоков.
Если транспортное средство в тр:айспортном положении находится не в горизонтальной плоскости, например в положении, указанном на фиг. 2, то при переводе фиксатора 18 в положение а толкатель каждого ор,гана управления перемещается на расстоя0 йие 3 органов упр.авлейия 6, 7 и 8 соответственно. Расход жидкости пропорционален перемещению толкателя
каждого органа управления. Одйовр емеййо с подъемом платформы происходит выравнивание ее в горизонтальной плоскости. Для
5 уменьщения скорости подъема платформы существует положение г. Фиксированных положений для подъема может быть любое необходимое количество.
Данное устройство обеспечивает упрощение гидравлической схемы, простоту в управлении при горизонтальном подъеме и опускании платформы тр:анспортйого ср едства, поддержание горизонтальности во время работы, одновр.еменную р аботу всех тидроцилиндров при выравнивании, подъеме -и опускании платформы, исключает возможность опрокидывания.платформы йа уклонах.
10-T
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1984 |
|
SU1339038A1 |
| Устройство для стабилизации заданного положения платформы транспортного средства | 1990 |
|
SU1743916A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1985 |
|
SU1379136A2 |
| Устройство для управления выносными опорами грузовой платформы | 1986 |
|
SU1423493A1 |
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
| Гидромеханическая система стабилизации положения рабочего органа планировочной машины | 1983 |
|
SU1164375A1 |
| Источник сейсмических колебаний | 1989 |
|
SU1714548A1 |
| КРЕНОВО-ТАНГАЖНОЕ ОТВЕСНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2340543C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ ПЛАТФОРМЫ ТРАНСПОРТНОГО СРЕДСТВА, содержащее маятниковый датчик углов наклона, имеющий отвес с пазами для взаимодействия с толкателями органов управления исполнительными гидроцилиндрами выносных опор, которые сообщены с силовой гидромагистралью, и ручной привод управления отвесом, отличающееся тем, что, с целью упрощения конструкции и управления устройством, пазы выполнены наклонными к продольной оси отвеса, смонтированного с возможностью вертикального перемещения указанным ручным приводом, который снабжен фиксатором положения отвеса в вертикальной плоскости. сл О5 О5 00 4 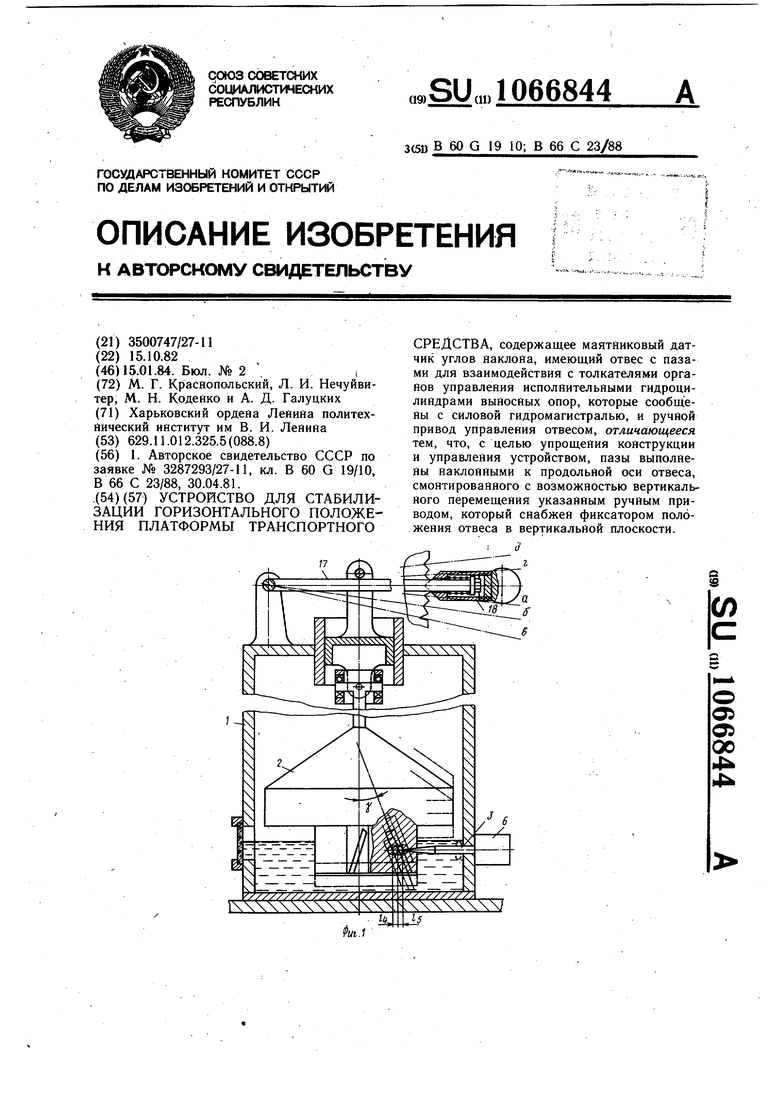
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3287293/27-11, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| . | |||
