Изобретение относится к подъемно транспортной технике, в частности к автоматическим торцовым захватам для ряда труб разного диаметра, .
Цель изобретения повышение удобства в работе
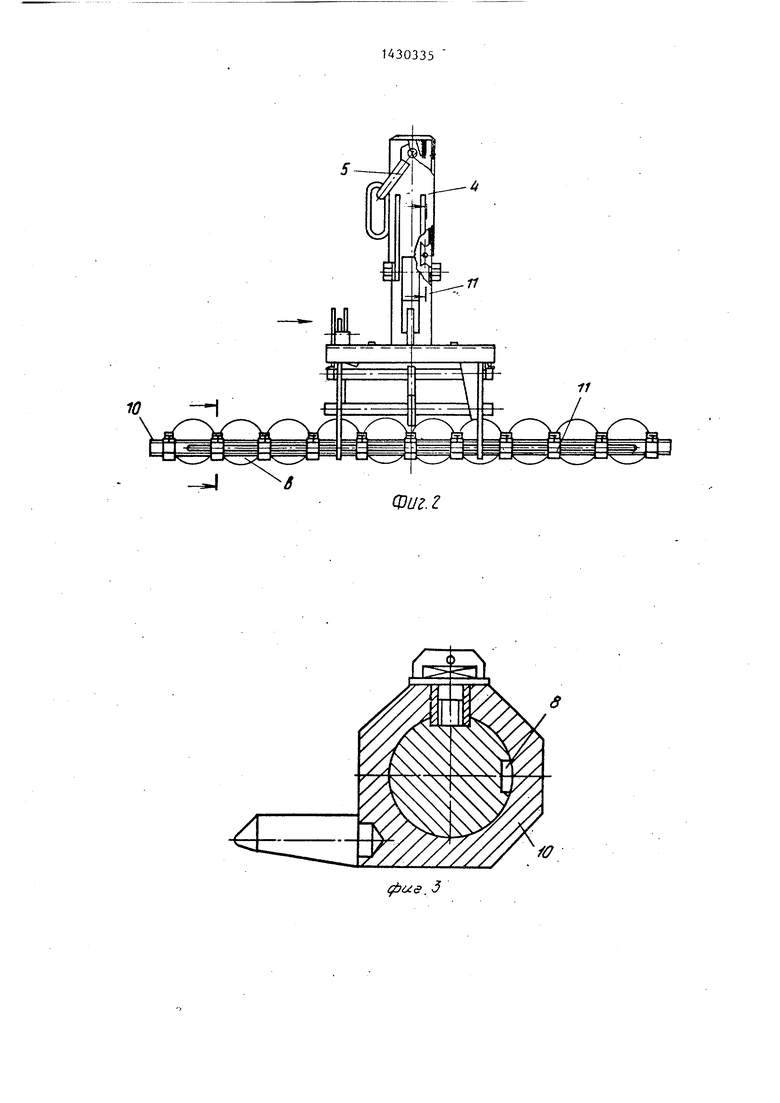
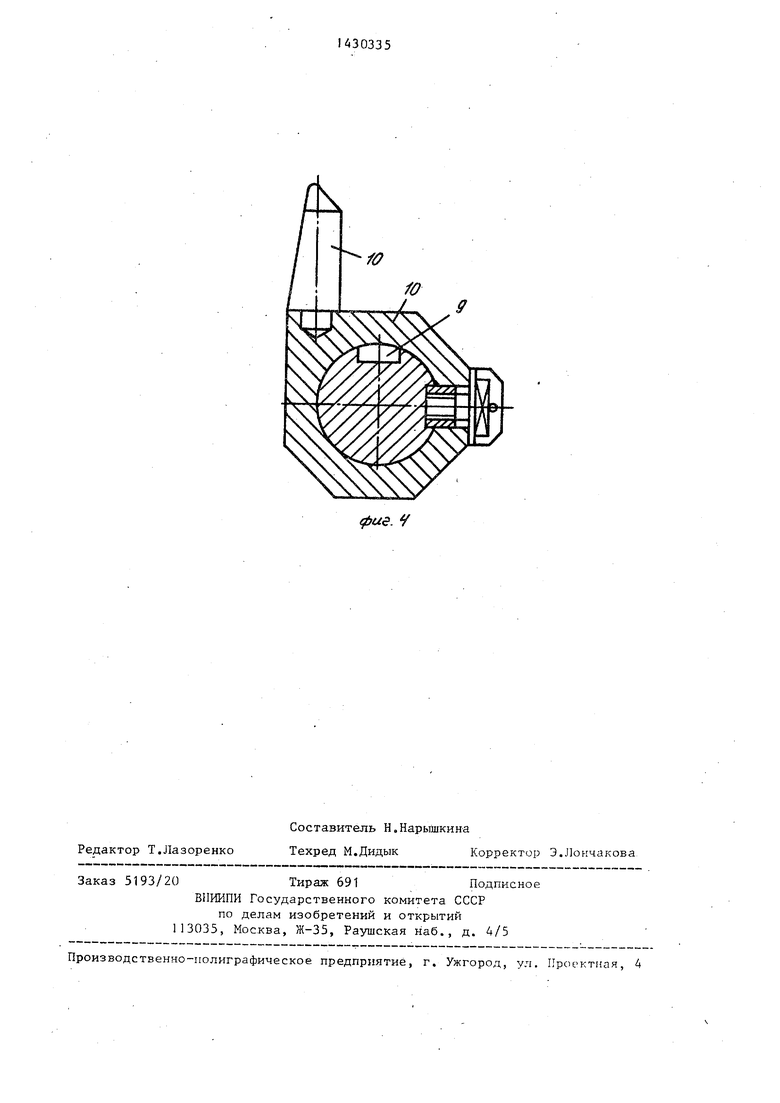
На фиг.1 изображен автоматический торцовый захват для ряда труб разного диаметра, общий вид; на фиг.2 - то же, вид сбоку; на фиго3 захватный орган в рабочем положении на фиг,4 - то же, в нерабочем поло женин
Захват состоит из следующих ос- новных узлов: рамы 1, на которой через оси 2 смонтированы телескопические рычаги Зд связанные одними плечами с ползуном 4 и подвеской 5,, Оси 2 установлены в горизонтальных пазах 6 продольных балок рамы 1. На нижних концах рычагов-3 закреплены резьбовые штанги 7 с двумя продольными направляющими пазами 8 и 9 для перемещения и фиксации захватных органов Юо ,
В верхней части рамы 1 по центру крепится направляющая 11 для ползун 4, котораяэ как и ползун, относится к механизму фиксации положения захватных органов 10,
В нижних, частях продольных балок рамы 1 шарнирно с возможностью фиксации их положения закреплены вертикальные стойки 12 с жестко закреп ленными на них параллельно штангам 7 осями 13 с жестко закрепленными н них кулачками Т4о Кулачки 14 связан с рычагами 15, которые имеют пальцы 16, которые фиксируют выбранное йол жение стоек 13 по одному из отверст сегментов 17, приваренных к раме 1. При развороте стоек 12 меняется выста гребня кулачка 14j что обеспечивает настройку захвата в горизонтальной плоскости
Захват работает следующим обраЗОМо
Подвеска 5 навешивается на крюк грузоподъемного устройства и захват транспортируется к трубам, при этом . шжние плечи двуплечих рычагов 3 ра веденыо При установке захвата на ря труб осуществляется их контакт с осями 13 вертикальных стоек 12, при этом захватные органы 10 будут со- риентированы по высоте труб, В это же время кулачки 14 за счет контакт с цилиндрической поверхностью изде
20
25
ю
J5
55
30
35
40
45
50
ЛИЙ опустятся в стыки между ними, в результате чего произойдет ориентировка захватных органов 10 в горизонтальной плоскости.
При подъеме захвата ползун 4 идет вверх. При воздействии ползуна 4 жние концы двуплечих рычагов 3 сходятся к центру, а захватные органы 10 заходят под изделия и доднимают их. При опускании изделий ползун 4 идет в исходное положение, а вертикальные плечи двуплечих рычагов отводятся от центра, освобождая грузо
Формула изобретения
1.Автоматический торцовый захват для ряда цилиндрических изделий разного диаметра, содержащий раму, расположенные параллельно поперечным балкам рамы штайги и с продольными направляющими пазами, установленные с возможностью продольного перемещения вдоль штанг По направляющим продольным пазам и фиксации захватные органы, механизм фиксации положения захватных органов, включающий ползун с жестко закрепленной на нем подвеской для крюка грузоподъемного механизма, закрепленные на горизонтальных осях продольных балок рамы рычаги, одни плечи которых связаны
с ползуном, а другие - со штангами, отличающийся тем, VTO, с целью повышения удобства в работе, он снабжен опорным устройством для взаимодействия с цилиндрическими изделиями, включаюш 1м шарнирно закрепленные в нижних частях продольных балок рамы с возможностью фиксации их положения в плоскости расположе - ния продольных балок вертикальные стойки, жестко закрепленные на них параллельно штангам оси и жестко закрепленные на них кулачки для расположения между двумя соседними цилиндрическими изделиями, а штанги выполнены с дополнительным продольным направляющим пазом для перемещения и фиксации захватных органов.
2.Захват попо1, отличающийся тем, что в продольных балках рамы выполнены горизонтальные пазы для перемещения и фиксации в них осей рычагов, а рычаги выполнены телескопическими и связаны с ползуном шарнирноо
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для ряда цилиндрических изделий | 1985 |
|
SU1418261A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Захватное устройство для длинномерных цилиндрических изделий | 1988 |
|
SU1532514A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захватное устройство | 1988 |
|
SU1625803A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МЯГКИХ ГРУЗОВ | 1988 |
|
SU1563151A1 |
| Захватное устройство для труб Максимова | 1985 |
|
SU1273329A1 |
| Роторный автомат питания | 1987 |
|
SU1516305A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к автоматическим торцовым захватам для ряда труб разного дд1а метра. Цель изобретения - повышение удобства работЫо Захват содержит опорное устройство, включающее кулачки 14, которые опускаются в стыки между двумя соседними трубами и ориентируют таким образом захватные органы 10 в горизонтальной плоскости. При этом оси 13 опорного устройства ориентируют захватные органы 10 в вертикальной плоскости. Ориентация захватных органов 10 по диаметру труб происходит за счет их перемещения по штангам 7 с последую- щен фыксациейо 1 ЗоП. ф-лы, 4 кЛо 5 1C 77 ОЭ оо О1 Фиг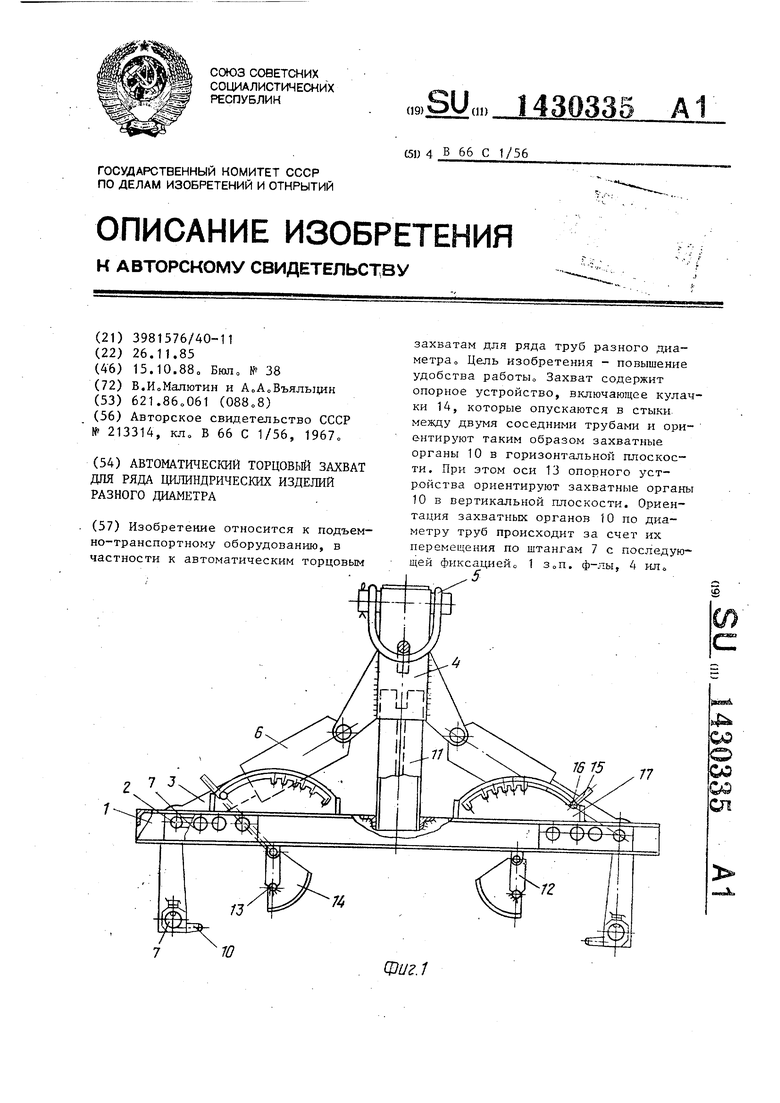
п(
11
Фиг. г
fo
фие. д
фи$.
| АВТОМАТИЧЕСКИЙ ТОРЦОВЫЙ ЗАХВАТ ДЛЯ ТРУБ | 0 |
|
SU213314A1 |
