Изобретение относится к устройствам ДЛЯ автоматического управления динамическим торможением дви1ателя постоянного тока, питаемого от управляемого ртутного выпрямителя по одиовентильпой схеме и переводимого на тормозной режим путем подключспия тормозного сопро1-ивления к якорю двигателя контактором, срабатывающим от датчика торможения.
Согласно изобретению, с целью точного опреде.1еиия направления передачи энергии в цепи двигателя, в качестве датчика торможения применен гюставлеиный в релейный режим магннтньш уси.: итель, одна из дифференцнал1 но действуЕОщих обмоток управления которого питается иапряжеиием на зажимах двигателя, а другая - током якоря двигателя через электрический веитиль.
Для ограничения величины тока в токовой обмотке управления магнитного усилителя нри изменениях нагрузки эта обмотка шунтирована иелинейным сопротивлением (например, твердым выпрямителем).
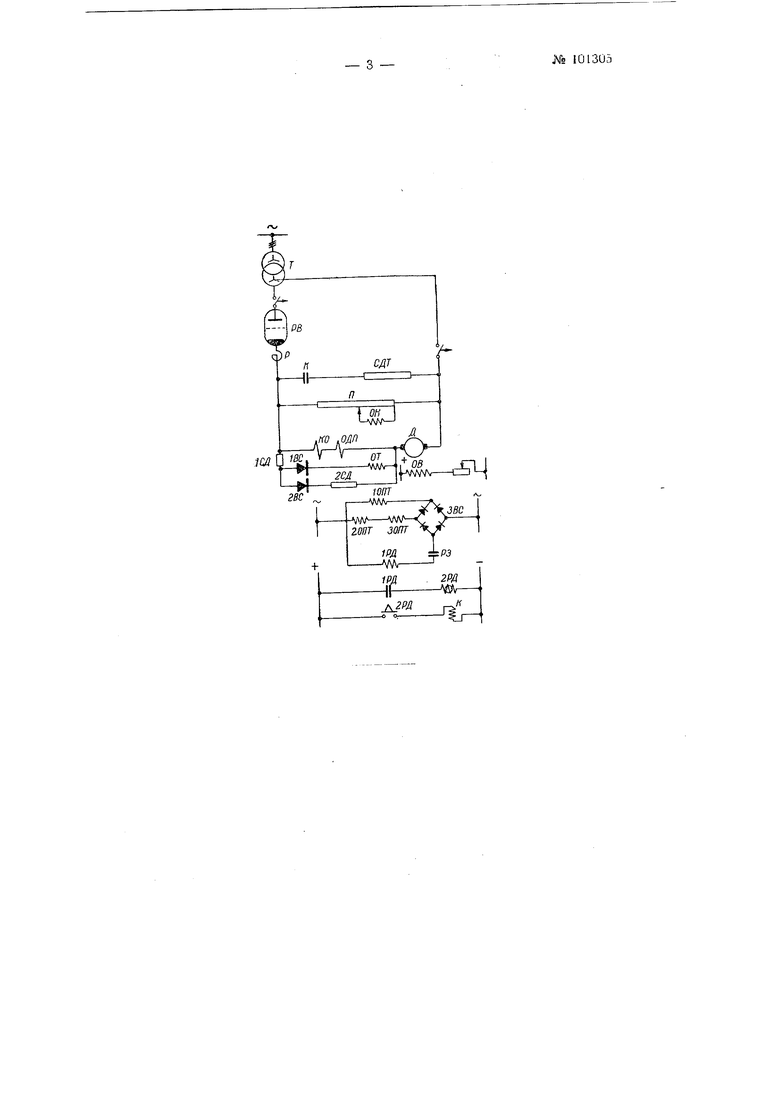
Схема предложенного устройства показяна нп чертеже, где: Т - трансформатор; РВ -- ртутный выирямитель;Р - реактор; Д - двигатель постоянного тока; ОБ - обмотка возбуждения двигателя; КО - компенсационная обмотка двигателя; ОДП - обмотка добавочных ио.-посов двигателя; П - потенциометр; СДТ - сопротивление динамического торможения; СД и 2СД - добавочные сопротивления; 1ВС и 2ВС - твердые выпрямите.ш. иснользуемые в качестве нелинейных сопротивлений; ЗВС - выпрямитель магнитного усилителя; ЮПТ, 20ПТ и ЗОПТ -- обмотки цепи переменного тока магнитного усилителя; ОН и ОТ - обмотка напряжения и токовая обмотка магнитного усилителя; 1РД и 2РД - электромаппггиые реле; К - контактор; РЭ - контакты реле э. д. с.
Обмотка напряжения ОН магнитного усилителя включеиа иа потенциометр Я, подключенный к напряжению ртутиого выпрямителя РВ, В режиме динамического торможеииянапраЕзление тока в этой обмотке 1К меняется.
Токовая обмотка ОТ магнитного усилителя подключена к шупту (либо иа падение напряжения в обмсггке добавочных иолюсов ОДИ ii
компенсационной обмотке КО) и работает через твердый выпрямитель JBC. Через эту обмотку ток проходит только в двигательном режиме. В режиме дииамического торможения в токовой обмотке ОТ ток не проходит (благодаря выпрямителю JBC).
Намагничивающие силы обмоток управления магнитного усилителя направлены навстречу дрз-т другу. В двигательном режиме в магнитном усилителе преобладают ампервитки токовой обмотки, ток на выходе усилителя незначителен и реле 1РД не включается. В момент, когда ток в двигателе становится равным . в магнитном усилителе остаются ампервитки обмотки напряжения. Ток на выходе усилителя резко возрастает и реле 1РД включается.
Контактами реле 1РД автоматически включается реле 2РД, а последнее включает контактор К. Двигатель подключается на сопротивление динамического торможения СДТ и тормозится до тех пор, пока э. д. с. якоря не станет мепьше выпрямленного напряжения, т. е. когда ток изменит направление и двигатель перейдет на работу в двигательном режиме. После этого реле 1РД и 2РД и контактор К отключаются.
Схема настраивается на действне Зсилителя при холостом ходе привода. Ток нагрузки привода может изменяться от холостого хода (5-10%) до 2 3-кратного значения.
Нелинейное сопротивление 2ВС ограничивает ток в обмотке при пагрузках, превышающих заданное значение.
Реле 2РД выполнено с успокоителем для предотвращения хлопания контактора /С при качаниях тока нагрузки.
Предмет н з о б р е т е н и я
1.Устройство для автоматического управления дииамическим торможением двигателя постоянного тока, питаемого от управляемого ртутного выпрямителя по одновентильной схеме п переводимого на тормозной режим путем подключения тормозного сопротивлення к якорю двигателя контактором, срабатывающим от датчика торможения, о т л и чающееся тем, что, с целью точного определения направления передачи энергии в цепи двигателя, в качестве указаиного датчика применен поставленный в релейный рел{им магнитный усилитель, одна из дифференциально действующих обмоток управления которого питается напряжением зажимах двигателя, а другая - током якоря двигателя через электрический вентиль.
2.Устройство по п. , о т л и ч а ющееся тем, что для ограничения величины тока в токовой обмотке управления магнитного усилителя нри изменениях нагрузки эта обмотка шунтирована нелинейным сонротивление.м, например, твердым выпрямителем.