Изобретение относится к машинестроению, а именно к ручным зажимны инструментам для переноса и установки, например, фотошаблонов в электронной промышленности. Наиболее близким к изобретению lio технической сущности и достигаем му результату является ручной зажимной инструмент, содержащий подпружиненные рычаги с губками и винт для установки губок в заданное положениеНедостатком извес.тного инструмен та являются болыяие усилия зажима, зависящие от положения детали относительно губок, индивидуальных особенностей оператора. Целью изобретения является умень шение усилия зажима. Указанная цель достигается тем, что в ручном зажимном инструменте, содержащем подпружиненные рычйги с губками и винт для установки губок, заданное положение, губки выполнены виде сорсно установленных и поворотных вокруг своих осей дисков с ребордами, предназначенными для захвата детали, На фиг.1 изображен инструмент, общий вид на фиг.2 - разрез А-А на фиг.1 (варианты ). ручной зажимной инструмент содержит рычаги 1 и 2 с губками 3 и 4 подпружиненные упругим элементом 5, винт б для установки губок 3 и 4 | в заданное положение. Губки 3 и 4 выполнены в виде еоосно установленных и поворотных вокруг своих осей 7 и 8 дисков с ребордами соответственно 9 и 10 для захвата детали 11. Ручной зажимной инструмент работает следующим образом. Сжимая рычаги 1 и 2, подводят инструмент к захватываемой детали 11. При снятии усилия сжатия с рычагов 1 и 2 упругий элемент 5 сжимает губки 3 и 4, которые ребордами 9 и 10 дисков захватывают, деталь 11, а последняя под действием своего веса поворачивает губки 3 и 4 вокруг осей 7 и 8-и устанавливается в положение, близкое к вертикальному. Усилие, необходимое для зажима, .определяется силами трения реборд 9 и 10, удерживаюцдами деталь 1-1, и не зависит от индивидуальных особенностей оператора, которому достаточно установить рычаги 1 и 2 таким образом, чтобы поверхности реборд 9 и 10 дисков были параллельны граням детали 11. Предлагаемый ручной зажимной инструмент позволяет осуществлять захват деталей с минимальным усилием, не зависящим от особенностей оператора, и обеспечивает удобство работы оператора за счет того, что губки не ориентированы жестко относительно рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль электроэрозионной последовательной вырезки группы заготовок | 1985 |
|
SU1321537A1 |
| Очувствленный захват | 1987 |
|
SU1502296A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Устройство для обработки штучных заготовок | 1990 |
|
SU1814951A1 |
| Захватное устройство | 1987 |
|
SU1426784A1 |
| Захват | 1980 |
|
SU905061A1 |
| УСТАНОВКА ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ДЕТАЛЕЙ ТИПА ДИСКОВ | 1991 |
|
RU2029301C1 |
| Ручной инструмент для постановки болт-заклепок | 1983 |
|
SU1131585A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Устройство для резки | 1984 |
|
SU1284741A1 |
РУЧНОЙ ЗАЖИМНОЙ ИНСТРУМЕНТ, содержащий подпружиненные рычаги с губками и винт для установки губок в заданное положение, отличающийся тем, что, с целью уменьшения усилия зажима, губки выполнены в виде соосно установленных и поворотных.вокруг своих осей дисков с ребордами, предназначенными для захвата детали. (Л оо го сд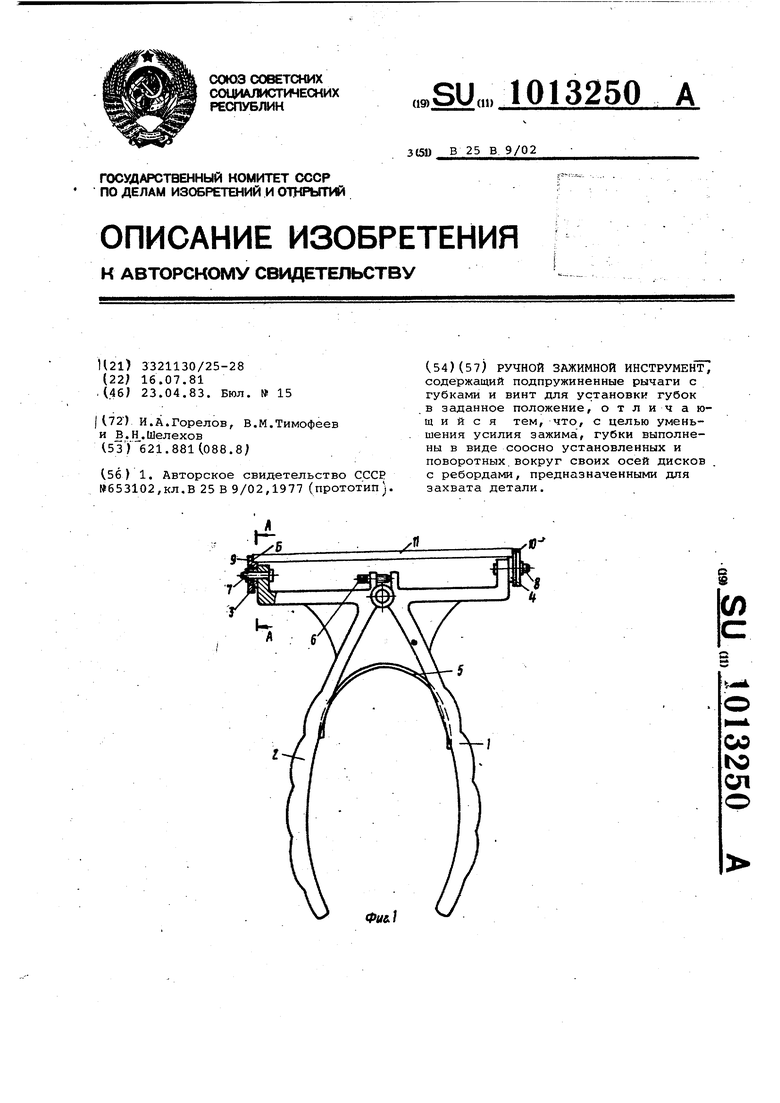
Фиг. 2
Фиг,3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пинцет | 1977 |
|
SU653102A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
