О)
СП
о
О)
31
губкой 8, выполненной в виде двуплечего рычага. Губка 8 установлена шарнирно относительно зажимного рычага 2 и подпружинена относительно него. На свободном конце губки 8 установлены флажки 11 и 14, которые имеют возможность взаимодействия с датчиком 10. Флажок 11 подпружинен относительно губки В и снабжен регу- лируемым упором 13. Флажок 14 подпружинен относительно флажка 11 и его положение регулируется упором 15.
При зажиме детали с отклонениями от заданных размеров флажки II и 14 меняют свое положение относительно датчика 10. При этом они имеют возможность прерывать световой поток от светоизлучателей. Светоприемники воспринимают световой сигнал и дают команду в систему управления. При этом опредешяются правильность установки детали, ее диаметр и усилие зажима. 5 ил.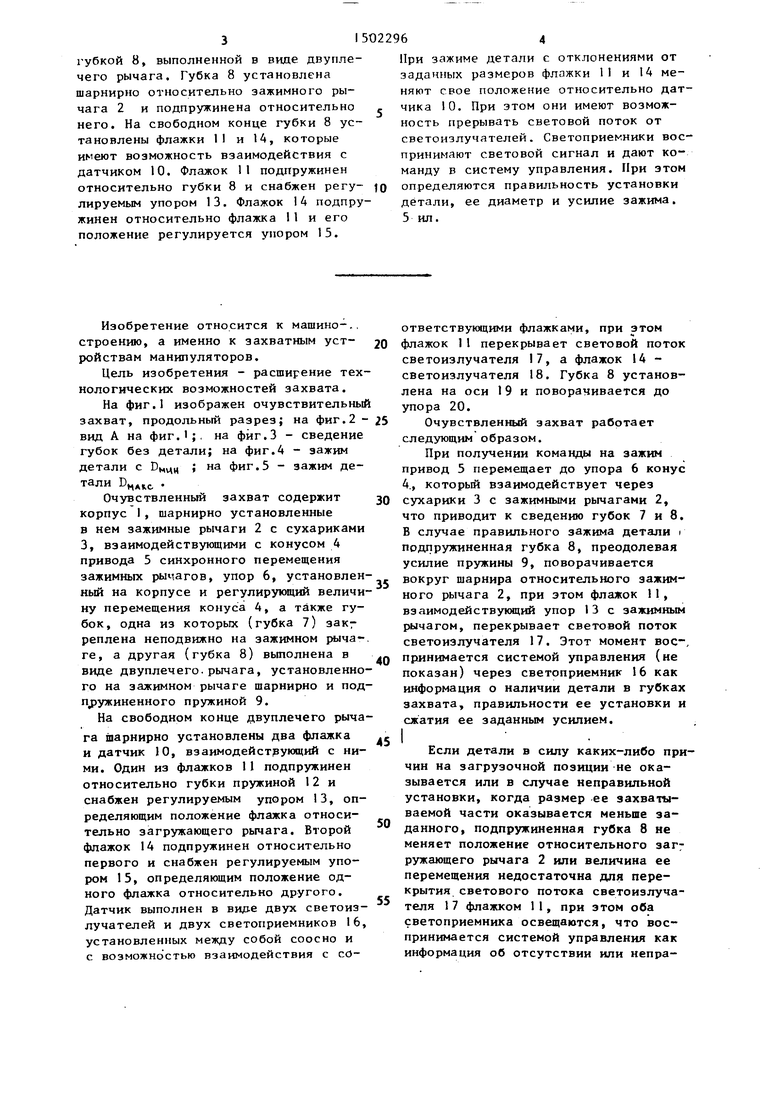
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Очувствленный схват робота | 1990 |
|
SU1815223A1 |
| Грузозахватное устройство | 1977 |
|
SU742338A1 |
| Зажимной механизм | 1985 |
|
SU1291391A1 |
| Манипулятор | 1986 |
|
SU1371851A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Робототехнический комплекс | 1981 |
|
SU1034892A1 |
| Захватное устройство | 1985 |
|
SU1291393A1 |
| Грузозахватное устройство | 1990 |
|
SU1785989A1 |
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1115883A1 |

Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов. Целью изобретения является расширение технологических возможностей. Для этого один из зажимных рычагов 2 снабжен губкой 8, выполненной в виде двуплечего рычага. Губка 8 установлена шарнирно относительно зажимного рычага 2 и подпружинена относительно него. На свободном конце губки 8 установлены флажки 11 и 14, которые имеют возможность взаимодействия с датчиком 10. Флажок 11 подпружинен относительно губки 8 и снабжен регулируемым упором 13. Флажок 14 подпружинен относительно флажка 11 и его положение регулируется упором 15. При зажиме детали с отклонениями от заданных размеров флажки 11 и 14 меняют свое положение относительно датчика 10. При этом они имеют возможность прерывать световой поток от светоизлучателей. Светоприемники воспринимают с световой сигнал и дают команду в систему управления. При этом определяется правильность установки детали, ее диаметр и усилие зажима. 5 ил.
Изобретение относится к машино-., строению, а именно к захватным устройствам манипуляторов.
Цель изобретения - расширение технологических возможностей захвата.
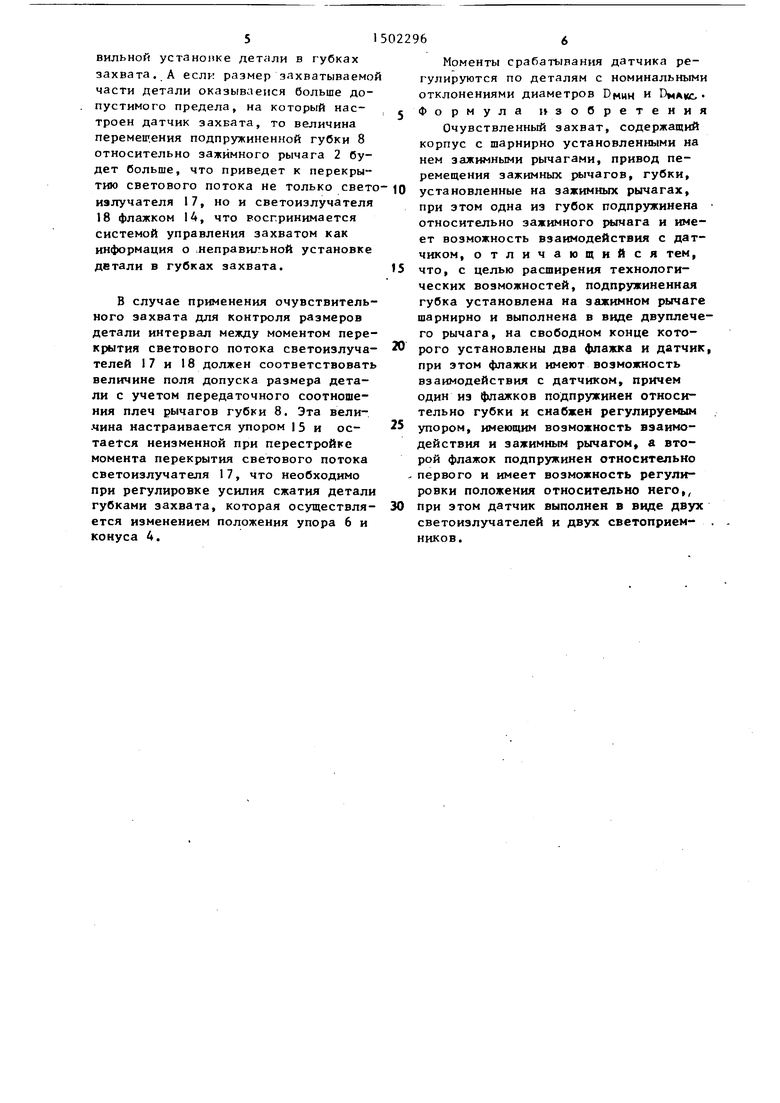
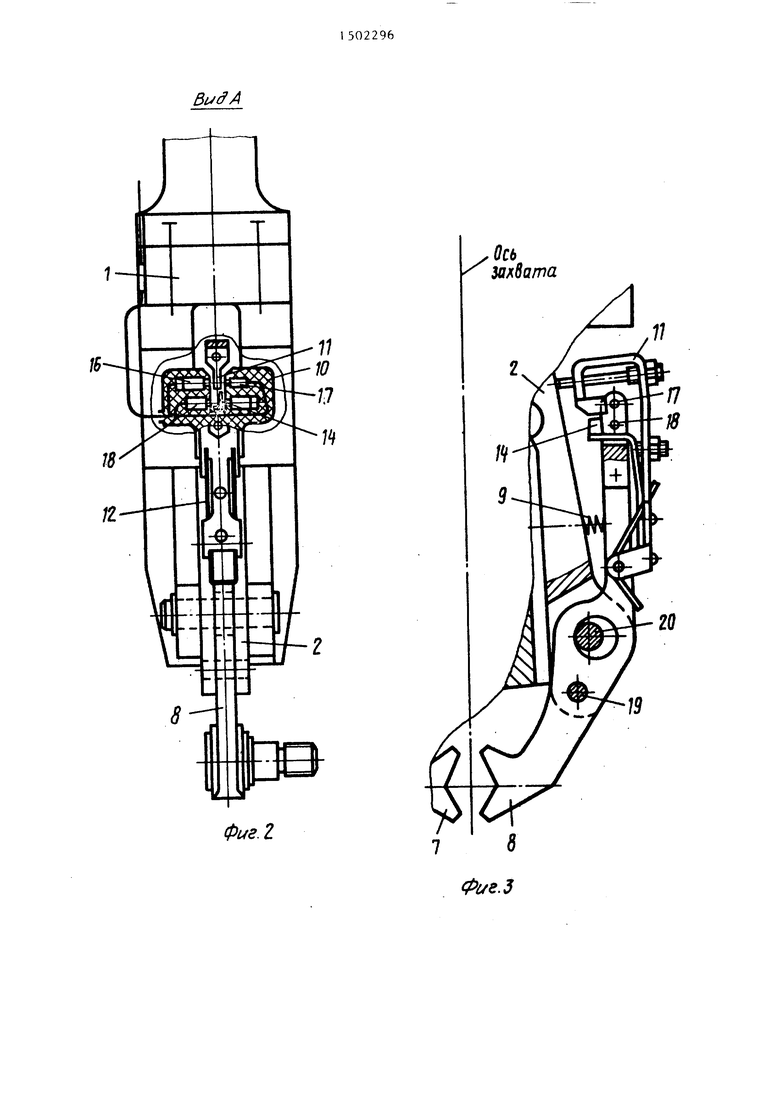
На фиг.1 изображен очувствительны захват, продольный разрез; на фиг.2 - вид А на фиг. ;, на фйг.З - сведение губок без детали; на фиг.4 - зажим детали с Сь,цц ; на фиг.5 - зажим детали D,c. .
Очувствленный захват содержит корпус I, шарнирно установленные в нем зажимные рычаги 2 с сухариками 3, взаимодействующими с конусом 4 привода 5 синхронного перемещения зажимных рычагов, упор 6, установленный на корпусе и регулирующий величину перемещения конуса 4, а также губок, одна из которых (губка 7) закг реплена неподвижно на зажимном рычаге, а другая (губка 8) вьтолнена в виде двуплечего.рычага, установленного на зажимном рычаге шарнирно и подпружиненного пружиной 9.
На свободном конце двуплечего рычага Марнирно установлены два флажка и датчик 10, взаимодейструкиций с ними. Один из флажков 11 подпружинен относительно губки пружиной 12 и снабжен регулируемым упором 13, определяющим положение флажка относительно загружающего рычага. Второй флажок 14 подпружинен относительно первого и снабжен регулируемым упором 15, определяющим положение одного флажка относительно другого. Датчик выполнен в виде двух светоизлучателей и двух светоприемников 16, установленных между собой соосно и с возможностью взаимодействия с сО0
5
0
5
0
5
0
5
ответствующими флажками, при этом флажок 11 перекрывает световой поток светоизлучателя 17, а флажок 14 - светоизлучателя 18. Губка В установлена на оси 19 и поворачивается до упора 20.
Очувствленный захват работает следующим образом.
При получении команды на зажим привод 5 перемещает до упора 6 конус 4., который взаимодействует через сухарики 3 с зажимными рычагами 2, что приводит к сведению губок 7 и 8. В случае правильного зажима детали i подпружиненная губка 8, преодолевая усилие пружины 9, поворачивается вокруг шарнира относительного зажимного рычага 2, при этом флажок 11, взаимодействующий упор 13 с зажимным рычагом, перекрывает световой поток светоизлучателя 17. Этот момент вое-, принимается системой управления (не показан) через светоприемиик 16 как информация о наличии детали в губках захвата, правильности ее установки и сжатия ее заданным усилием.
I
Если детали в силу каких-либо причин на загрузочной позиции не оказывается или в случае неправильной установки, когда размер ее захватываемой части оказывается меньше заданного, подпружиненная губка В не меняет положение относительного заг; ружающего рычага 2 или величина ее перемещения недостаточна для перекрытия светового потока светоизлучателя 17 флажком 11, при этом оба светоприемника освещаются, что воспринимается системой управления как информация об отсутствии или непра5
вильной устаноике детали в губках захвата. А если размер захватываем части детали оказываемся больше допустимого предела, на который настроен датчик захвата, то величина перемещения подпружиненной губки 8 относительно зажимного рычага 2 будет больше, что приведет к перекрытию светового потока не только све излучателя 17, но и светоизлучател 18 флажком 14, что воспринимается системой управления захватом как информация о .неправильной установк детали в губках захвата.
В случае применения очувствитель- ного захвата для контроля размеров детали интервал между моментом перекрытия светового потока светоизлуча- телей 17 и 18 должен соответствовать величине поля допуска размера детали с учетом передаточного соотношения плеч рычагов губки 8. Эта вели- .чина настраивается упором | 5 и остается неизменной при перестройке момента перекрытия светового потока светоизлучателя 17, что необходимо при регулировке усилия сжатия детали губками захвата, которая осуществляется изменением положения упора 6 и конуса 4.
Q
5
0
5
0
Моменты срабатывания датчика регулируются по деталям с номинальными отклонениями диаметров БМИН и DMAKC. Формула изобретения
Очувствленный захват, содержащий корпус с шарнирно установленными на нем зажимными рычагами, привод перемещения зажимных рычагов, губки, установленные на зажимных рычагах, при этом одна из губок подпружинена относительно зажимного рычага и имеет возможность взаимодействия с датчиком, отличающийся тем, что, с целью расширения технологических возможностей, подпружиненная губка установлена на зажимном рычаге шарнирно и выполнена в виде двуплечего рычага, на свободном конце которого установлены два флажка и датчик, при зтом флажки имеют возможность взаимодействия с датчиком, причем один из флажков подпружинен относительно губки и снабжен регулируемым упором, имеющим возможность взаимодействия и зажимным рычагом, а второй флажок подпружинен относительно первого и имеет возможность регулировки положения относительно него,, при этом датчик выполнен в виде двух светоизлучателей и двух светоприем- ников.
фиг. 2
Qcb твата
11
го
19
Фиг.
cpife.5
| Захват промышленного робота | 1980 |
|
SU918086A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
