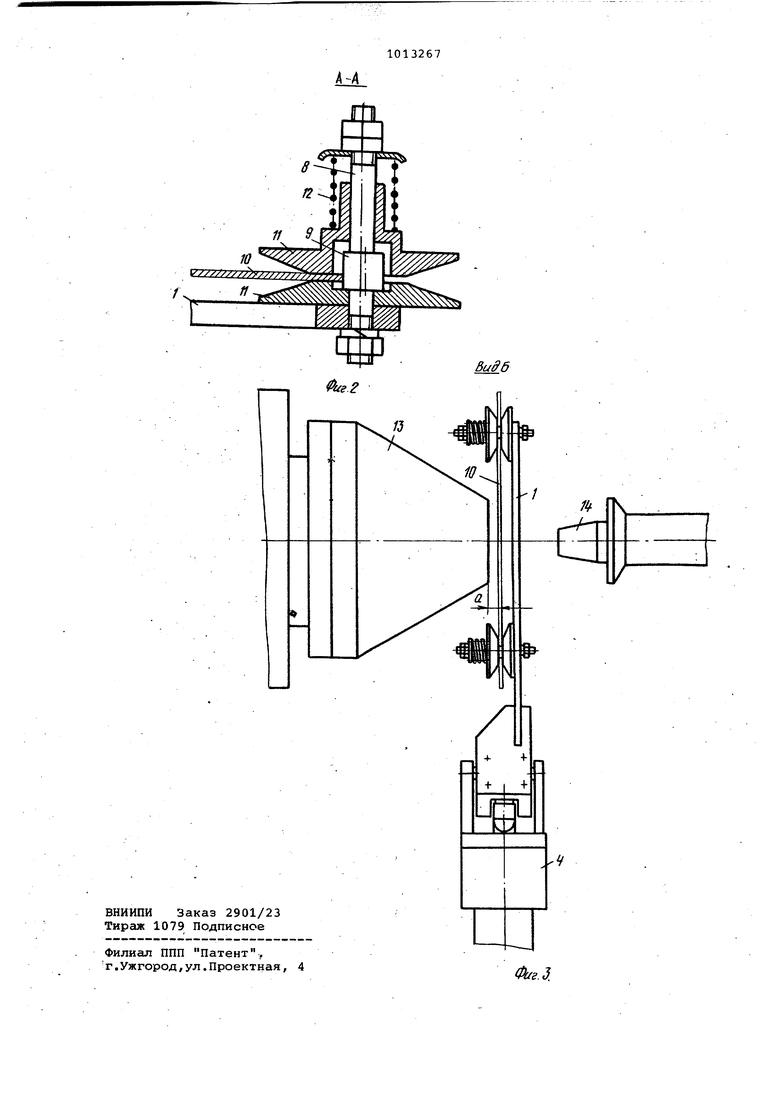
Изобретение относится к средства механизации и автоматизации производственных процессов и может быть использовано для переноса заготовок преимущественно листовых, и для их ориентирования и фиксации в зоне , обработки. Известно устройство для переноса заготовок, преимущественно листовых в зону обработки, содержащее шарнир но соединенные подпружиненные один относительно другого двуплечие рыча ги, закрепленные на корпусе привода СП. Недостатком известного устройств является то, что оно не обеспечивае точного ориентирования и фиксации з готовок в зоне обработки. Наиболее близким к изобретению по технической суг-дности и достигаемому эффекту является устройство для ориентирования и фиксации заготовок, преимущественно листовых, в зоне обработки, содержащее два двуплечих, подпружиненных один относительно дру гого, рычага, одно плечо каждого из которых шарнирно связано с плечом другого, два фиксатора, соответствен но установленные каждый на свободном плече одного из рычагов, и два допол нительных фиксатора I Однако известным устройством затруднительно подавать заготовки в зо ну обработки. Целью изобретения является обеспечение возможности переноса и повышение точности ориентирования заготовок. Для достижения этой цели в устройстве для ориентирования и фиксации заготовок, преимущественно листовых, в зоне обработки, содержащем два двуплечих подпружиненных один относительно другого рычага, одно плечо каждого из которых шарнирно связано с плечом другого, два фиКсатора, соответственно установленные каждый на свободном плече одного из рычагов, и два дополнительных фиксатора, каждый из дополнительных фиксаторов установлен на свободном плече одного из рычагов, каждый фиксато выполнен в виде закрепленного на рычаге пальца с эксцентрик .-м, размещен ным с возможностью взаимодействия с боковой поверхностью заготовки, и двух конических подпружиненных одна к другой шайб, обращенных меньшими основаниями навстречу друг другу и установленных на пальцах с возможностью взаимодействия с торцовыми поверхностями заготовки. На фиг.1 изображено устройство, общий вид/ на фиг.2 - разрез А-А на фиг.1; на фиг.З --вид Б на фиг.1 (вид устройства с заготовкой в зоне обработки). Устройство содержит два рычага 1 с фиксаторами 2, Рычаги 1 с помощью осей 3 закреплены на корпусе пневмоцилиндра 4 привода схвата манипулятора. Клин 5 расположен между роликами б рычагов 1, между которыми установлена пружина 7 сжатия. Каждый из фиксаторов 2 выполнен в виде закрепленного на рычаге 1 пальца 8 с эксцентриком 9, установленным с возможностью взаимодействия, с заготовкой 10, и двух конических шайб 11, подпружиненных одна к другой пружиной 12. В зоне обработки (например, при ротационном выдавливании) установлена оправка 13 обрабатывающей машины и прижим 14 пиНОЛи машины. Работа устройства осуществляется следующим образом. Схват манипулятора с устройством подводится к заготовке таким образом, чтобы плоскость смыкания конических шайб 11 совпала с плоскостью заготовки 10.. При подаче воздуха в пневмоцилиндр 4 привода клин 5 выдвигается и сводит рычаги 1. При этом заготовка. 10 своими кромками скользит по коническим поверхностям шайб 11 и самоустанавливается независимо от отклонений в исходном положении между фиксаторами 2, базируясь относительно эксцентриков 9 пальцев 8, предварительно преодолев упругость пружин 12 и раздвинув шайбы 11. После смыкания и центрирования заготовки 10 рычагами 1 схват манипулятора переносит заготовку 10 в зону обработки и располагает ее между оправкой 13 и прижимом 14 на расстоянии 01 от оправки 13. После включения пиноли обрабатывающей машины прижим 14 смещает заготовку 10 к оправке, отжимая верхние конические шайбы 11, преодолевая действие пружин 12. После.прижатия загртовки 10 к оправке 13 клин 5 выхо- дит из-под роликов б, пружина 7 разводит рычаги 1, и схват манипуЛятора перемещается за новой заготовкой, а обрабатывающая машина производит технологическую операцию. Затем цикл повторяется. ПредлагаемЬе устройство обеспечивает возможность переноса и повышения точности ориентирования заготовок.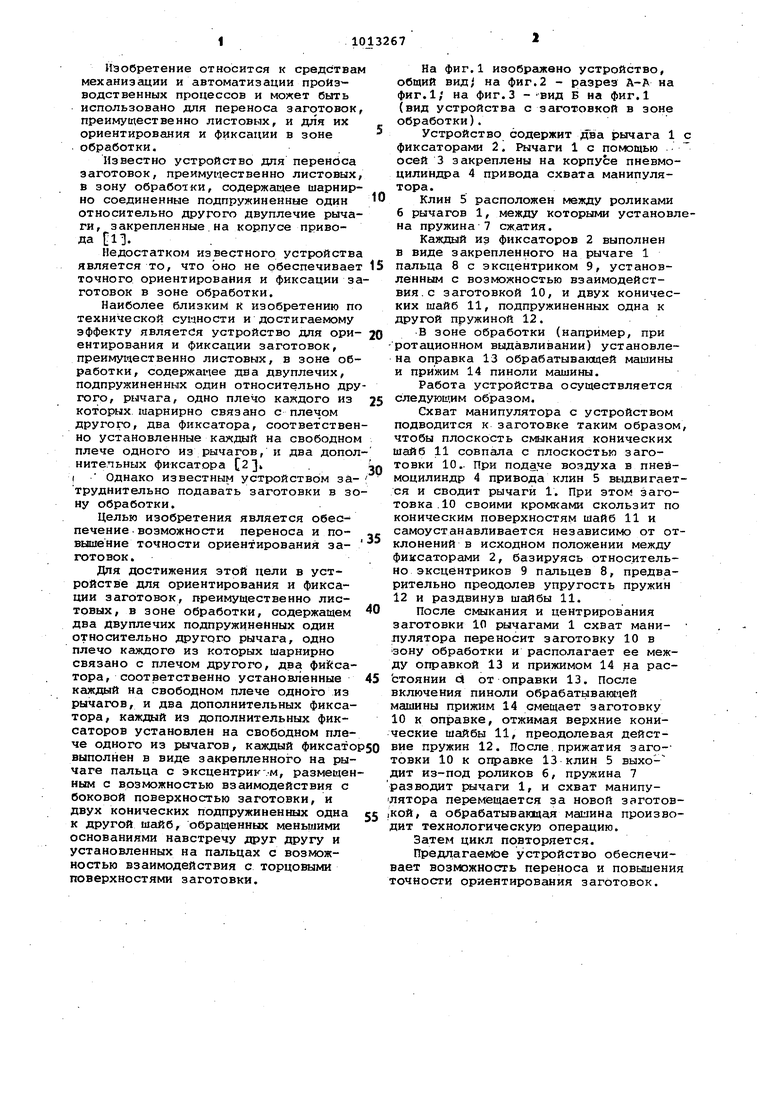
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для поштучной выдачи деталей | 1987 |
|
SU1466848A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| ПОЛУАВТОМАТ ДЛЯ ПРОТЯГИВАНИЯ ДЛИННЫХ ИЗДЕЛИЙ | 1970 |
|
SU270448A1 |
| Гибкая производственная система | 1988 |
|
SU1780992A1 |
| Схват | 1986 |
|
SU1315303A1 |
| Схват | 1986 |
|
SU1335450A1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ. И ФИКСАЦИИ ЗАГОТОВОК, преимущественно листовых, в зоне обработки, содержащее два двуплечих подпружиненных один относительно другого рычага, одно плечо каждого из которых шарнирно связано с плечом другого, два фиксатора, соотЬетственно установленные каждый на свободном плече одного из рычагов, и два дополцительннх фиксатора, отличающееся тем, что, с целью обеспечения возможности переноса и повкпаения точности ориентирования заготовок, каждьлй из дополнутельньлх фиксаторов установлен на свободном плече одного из рычагов, каждый фиксатор выполнен в.виде закрепленного на рычаге пальца с эксцентриком, размещенным с возможностью взаимодействия с боковой поверхностью заготовки, и двух конических подпружиненных одна к другой шаПб, обраьченных меньшими основаниями навстречу друг другу и установленных на пальцахс возможностью взаимодеп«Л ствия с торцовыми поверхностями заготовки. со ю Од sl
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для ориентации и фиксации заготовки в зоне обработки | 1979 |
|
SU774723A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
