ft)j
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления торможением | 1981 |
|
SU1013323A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2086441C1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
| Способ торможения колеса | 1984 |
|
SU1169860A1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Способ автоматического управления торможением | 1981 |
|
SU1022841A1 |
| Способ торможения колеса транспортного средства | 1980 |
|
SU927601A1 |
От источника давления
Фиг. 2
ГЧ)
11368209
зобретение относится к автомобидасп зо же ме ни по ни ду ме
лестроейию, преимущественно к тормозным системам транспортных средств, может быть использовано в противобло- кировочных тормозных системах и является усовершенствованием изобретения по авт.св. № 1013323.
Цель изобретения заключается в повьшении эффективности торможения.
На фиг.1 показана диаграмма изменения абсолютной величины разности текущего и эталонно4: о значений углового ускорения колеса; на фиг.2 - функциональная схема устройства для реализации способа.
Корректировку темпа изменения давления в тормозном приводе начинают в момент времени t , когда абсолютная величина разности углового ускорения ш колеса и его зталонного значения cjj достигнет порогового значения А. При этом имеется в виду, что в начальный период торможения абсолютная величина углового ускорения колеса превосходит абсолютную величину эталонного углового ускорения. Значение, А выбирают таким образом, чтобы условие
, А (1) выполнялось при S 7 8ц, где S - ко- эффициент сцепления колеса с дорогой; S ц - максимальный коэффициент сцепления. Причем, при недостаточной величине А начало снижения темпа роста давления может произойти при S SK, а при чрезмерно большой величине А возможна блокировка колеса. В зависимости от конструктивных особенностей транспортного средства (радиусов колес, быстродействия тормозного привода, характеристик подвески и т.д.) величину А следует выбирать в диапазоне 10 50 рад/с .
Начало корректировки давления при вьтолнении условия (1) обеспечивает более быстрое достижение близких к максимальному значений коэффициента сцепления, что повышает эффективность
10
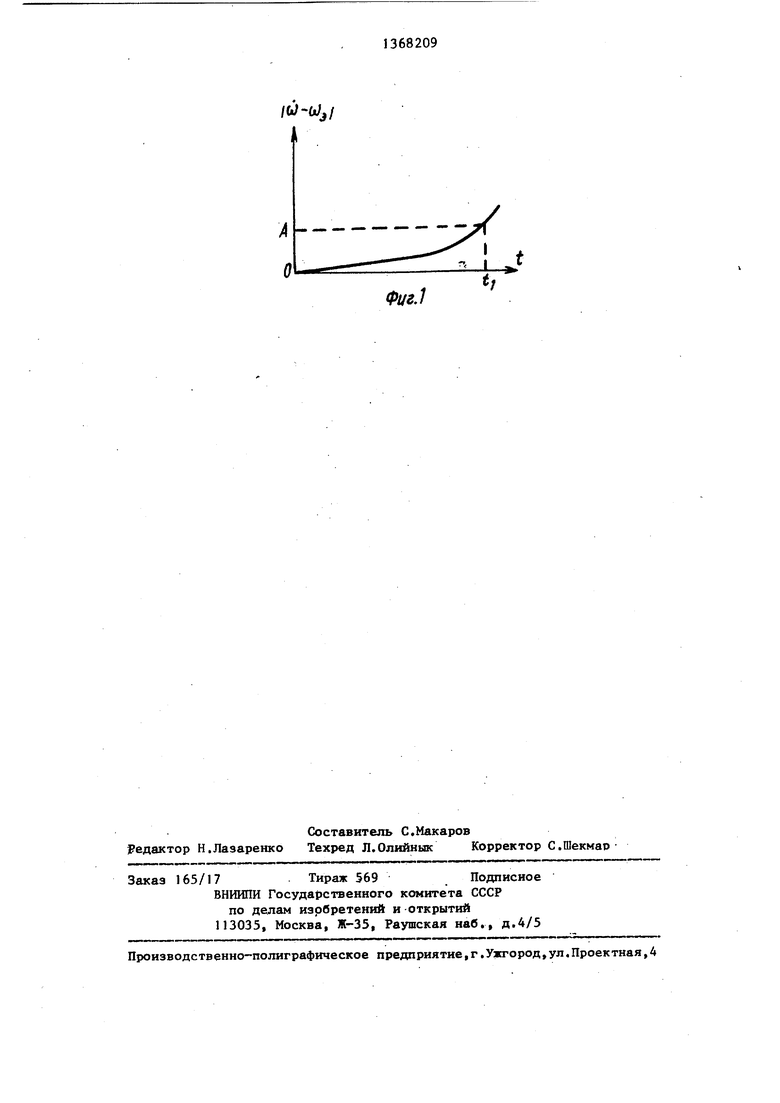
Устройство состоит из колесного датчика 1, датчика 2 замедления транспортного средства, блока 3 преобразования сигнала датчика 1 Z в напряжение и и дифференцирования его (зле- мент d/dt) в аналог углового ускорения колеса, суммирующего устройства 4, блока 5 сравнения, блока 6 задачи порогового значения, блока 7 сравнения, усилителя 8, коммутатора 9, модулятора 10 давления и тормозной камеры 11.
1Г
30
Сигнал датчика 1 преобразуется в блоке 3 в аналог углового ускорения колеса. Устройство 4 суммирует этот аналог с инвертированным эталонным значением, вырабатываемым датчиком
20 2 пропорционально замедлению транспортного средства. Блок 5 сравнивает абсолютное значение этой суммы с пороговой величиной А, задаваемой блоком 6. При выполнении условия (1)
блок 5 подает сигнал блоку 6 и коммутатору 9. Блок 6 присваивает пороговому значению новое значение , что обеспечивает отмену контроля соблюдения условия (1) до конца торможения, а коммутатор 9 соединяет усилитель 8 с модулятором 10, -обеспечивая начало корректировки давления в тормозной камере П. Одновременно блок 7 контролирует знак углового
35 ускорения и, в случае его смены на положительный, подает сигнал коммутатору 9 на.прекращение корректировки давления, т.е. на отключение усилителя 8 от модулятора 10.
40
Фор мула изобретения
Способ автоматического равления торможением по авт.св. № 1013323, 45 отличающийся тем, что, с целью повышения эффективности торможения, в начальной стадии торможения корректировку темпа приложения
щзиводного давления начинают при торможения. После начала корректиров- 50 достижении абсолютной величины разки давления условие (1) неизбежно на- ности текущего и эталонного значений рушится, поэтому контроль соблюдения углового ускорения колеса порогового этого условия после начала корректи- значения, выбранного в диапазоне 10т ровки давления прекращают.50 рад/с .
Устройство состоит из колесного датчика 1, датчика 2 замедления транспортного средства, блока 3 преобразования сигнала датчика 1 Z в напряжение и и дифференцирования его (зле- мент d/dt) в аналог углового ускорения колеса, суммирующего устройства 4, блока 5 сравнения, блока 6 задачи порогового значения, блока 7 сравнения, усилителя 8, коммутатора 9, модулятора 10 давления и тормозной камеры 11.
Сигнал датчика 1 преобразуется в блоке 3 в аналог углового ускорения колеса. Устройство 4 суммирует этот аналог с инвертированным эталонным значением, вырабатываемым датчиком
2 пропорционально замедлению транспортного средства. Блок 5 сравнивает абсолютное значение этой суммы с пороговой величиной А, задаваемой блоком 6. При выполнении условия (1)
блок 5 подает сигнал блоку 6 и коммутатору 9. Блок 6 присваивает пороговому значению новое значение , что обеспечивает отмену контроля соблюдения условия (1) до конца торможения, а коммутатор 9 соединяет усилитель 8 с модулятором 10, -обеспечивая начало корректировки давления в тормозной камере П. Одновременно блок 7 контролирует знак углового
ускорения и, в случае его смены на положительный, подает сигнал коммутатору 9 на.прекращение корректировки давления, т.е. на отключение усилителя 8 от модулятора 10.
Фор мула изобретения
Способ автоматического равления торможением по авт.св. № 1013323, отличающийся тем, что, с целью повышения эффективности торможения, в начальной стадии торможения корректировку темпа приложения
/о)-Ц,/
| Способ автоматического управления торможением | 1981 |
|
SU1013323A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
