РО
Изобретение относится к высоко- точным системам автоматического управления и может быть использовано в следяющих системах с люфтом в механической передаче.
Цель изобретения - расширение динамического диапазона работы системы.
На чертеже представлена схема комбинированной системы с люфтом. Система содержит измеритель 1 рассогласования, первый усилитель 2, первый сумматор 3, второй усилитель k, исполнительный двигатель 5, редуктор 6, блок 7 обратной связи, блок 8 скоростной обратной связи, первый дифференциатор 9, интегратор 10, второй сумматор 11, второй дифференци
атор 12, первый регулируемый ограничитель 13 и второй регулируемый ограничитель 14.
Комбинированная следящая система работает следующим образом.
На выходе измерителя 1 рассогласования при сравнении входного сигнала и выходного сигнала Q RM , прошедшего через блок 7 обратной связи, образуется сигнал ошибки Q . Управляющий сигнал формируется на выходе первого сумматора 3 при суммировании усиленного первым усилителем 2 сигнала ошибки и сигнала скоростной отрицательной обратной связи с выхода блока 8 скоростнбй обратной связи и сигнала с выхода первого дифференциатора 9, вводимого для компенсации динамической ошибки следящей системы. Полученный управляющий сигнал с выход первого сумматора 3 через второй уси- ,литель 4 подается на вход исполнитель ного двигателя 5. Редуктор 6 приводится в движение исполнительным двигателем 5.
Уменьшение ошибки от люфта и от личины входного сигнала происходит следующим образом.
С помощью интегратора 10 и второго сумматора 11 измеряется текущая величина люфта. Сигнал, пропорциональный этой величине, формируется на выходе второго сумматора 11. С помощью дифференциатора 12 определяется величина, пропорциональная скорости изменения люфта, которая поступает на информационный вход первого регулируемого ограничителя 13, где ограничивается определенной величине, причем величина ограничения определяетве
20
15464
ся величиной люфта (сигнал с выхода второго сумматора).
Однако при малой скорости нараста- ния входного сигнала система не обеспечивает требуемой точности, так как величина рассогласования мала и сигнал на выходе первого регулируемого ограничителя 13 не достигает величины,
Ю определяемой величиной люфта. Для повышения точности работы системы с выхода второго регулируемого ограничителя 14 на шестой вход первого сумматора подается сигнал, пропорциональ15 ный сигналу с выхода первого регулируемого ограничителя 13 и обратно пропорциональный скорости нарастания входного сигнала.
Таким образом, при большой скорости изменения входного сигнала сигнал на выходе второго регулируемого ограничителя 14 мал, а точность работы системы обеспечивается за счет сиг30
2535
регулируемого ограничителя 13, а при малой скорости изменения входного сигнала требуемая точность обеспечивается вторым регулируемым ограничителем 14.
Так как сигнал с выхода второго дифференциатора имеет большую величину, что может приводить к насыщению второго усилителя и, как следствие, к увеличению ошибки системы, при уменьшении величины люфта уровень ограничения уменьшается. Таким
образом предотвращается насыщение второго усилителя после выбора люфта исполнительным двигателем 5.
Сформированные сигналы поступают на первый сумматор 3, усиливаются вторым усилителем и подаются на исполнительный двигатель 5, который осущестдс вляет выбор люфта редуктора 6.
45
Формула изобрет и я
Комбинированная следящая система с люфтом по авт. св. № 1318989, отличающаяся тем, что, с целью расширения динамического диапазона работы системы, в нее введен второй регулируемый ограничитель, информационный вход которого соединен с выходом первого регулируемого ограничителя, управляющий вход - с выходом первого дифференциатора, а выход - с шестым входом первого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированная следящая система с люфтом | 1985 |
|
SU1318989A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1982 |
|
SU1109711A1 |
Изобретение относится к высокоточным системам автоматического управления и может быть использовано в следящих системах с люфтом в механической передаче. Целью изобретения является расширение динамического диапазона работы системы. Система содержит измеритель 1 рассогласования, первый усилитель 2, первый сумматор 3, второй усилитель 4, исполнительный двигатель 5, редуктор 6, блок 7 обратной связи, блок 8 скоростной обратной связи, первый дифференциатор 9, интегратор 10, второй сумматор 11, второй дифференциатор 12, первый регулируемый ограничитель 13 и второй регулируемый ограничитель 14. Введение контура дополнительного сигнала, учитывающего как скорость изменения входного сигнала, так и текущую величину люфта, повышает точность работы системы при малой скорости изменения входного сигнала, а также повышает быстродействие при отработке люфта редуктора. 1 ил.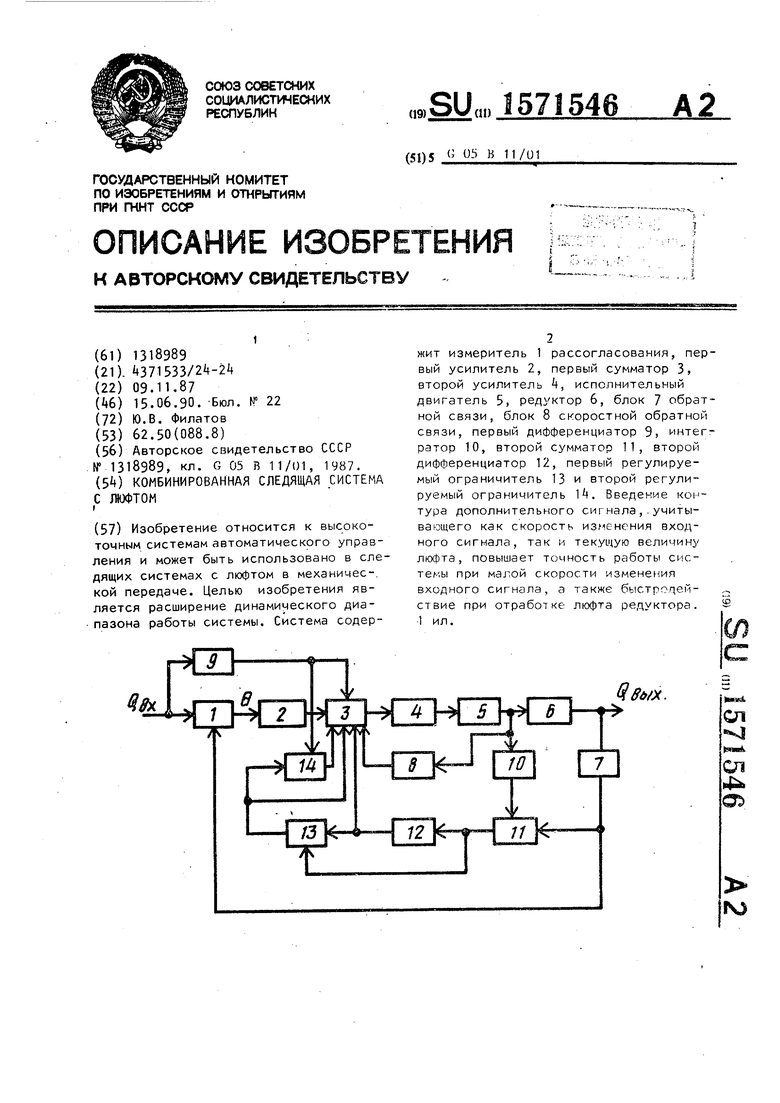
| Комбинированная следящая система с люфтом | 1985 |
|
SU1318989A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ( КОМБИНИРОВАННАЯ СЛЕДЯЩАЯ СИСТЕМА С ЛЮФТОМ I | |||
