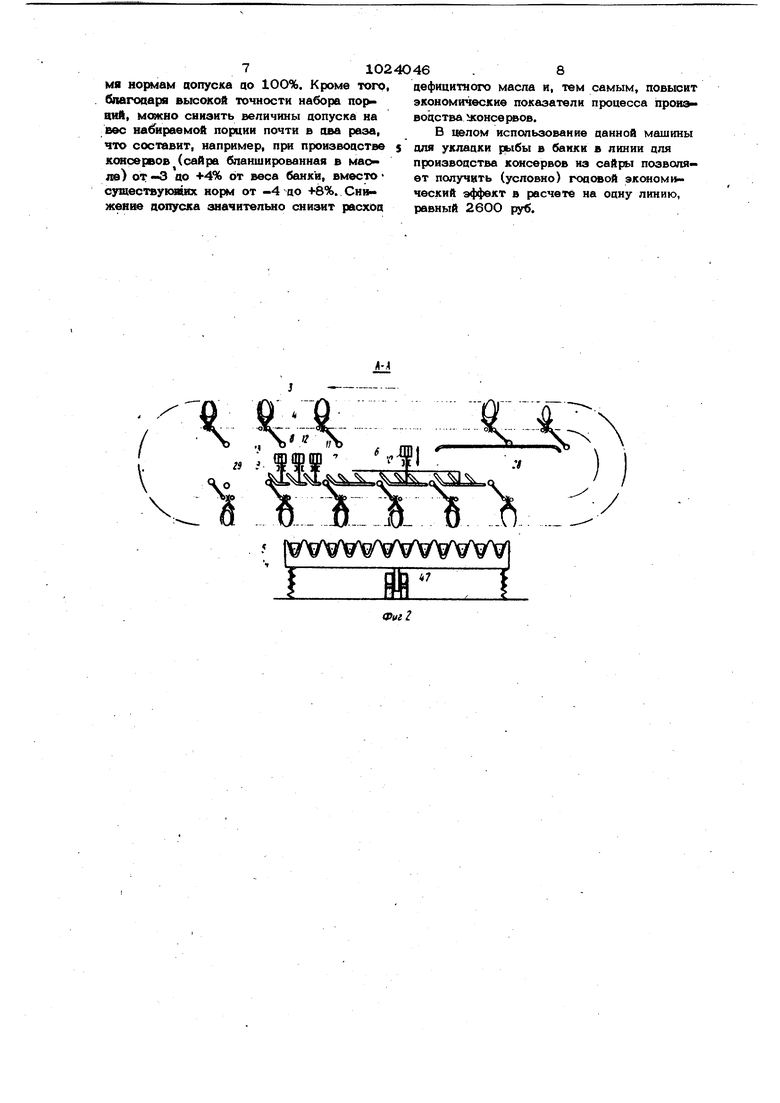
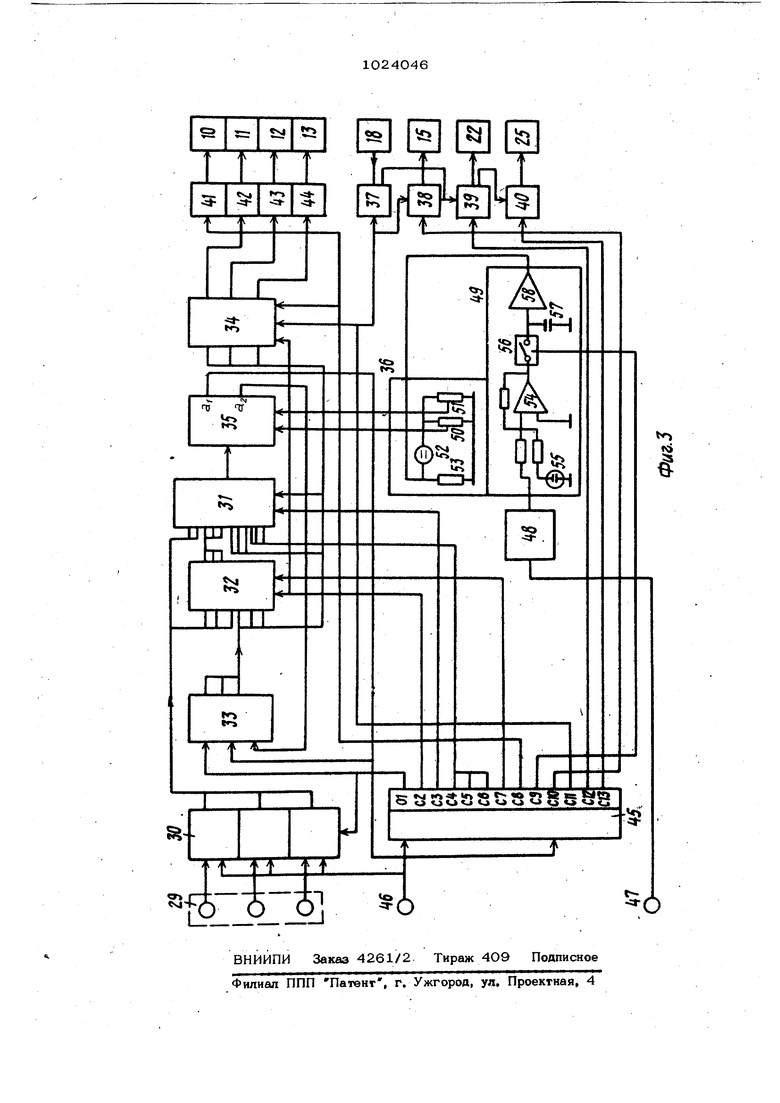
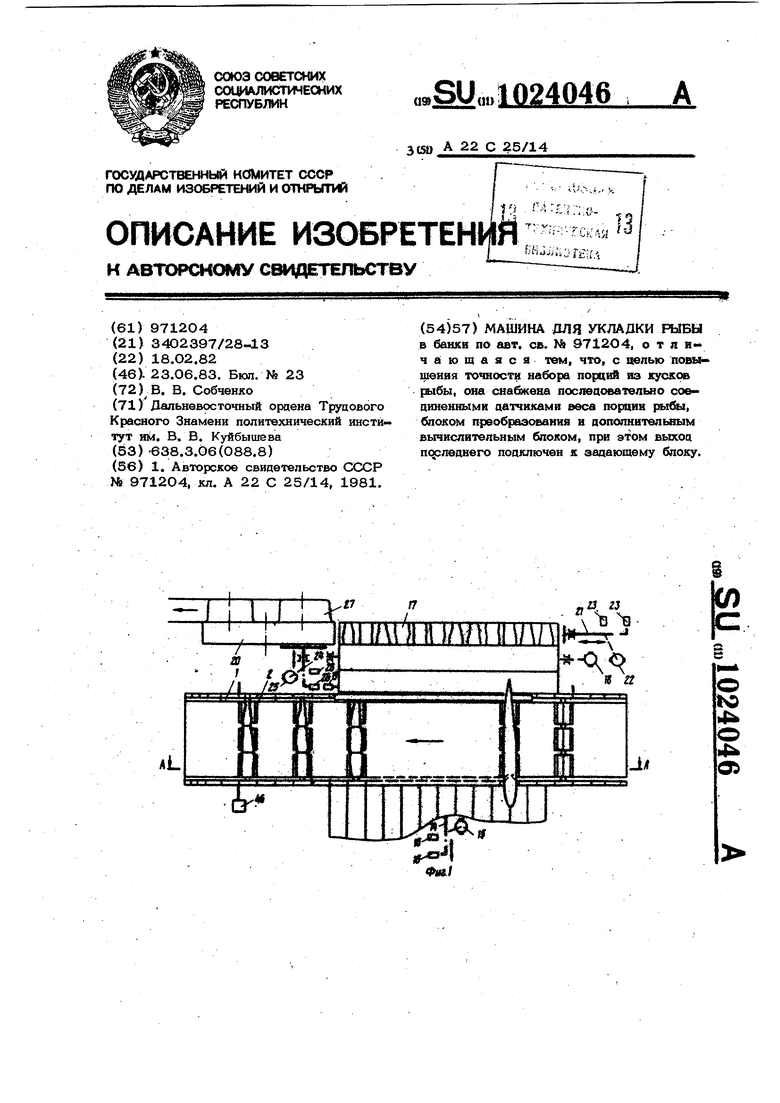
,1 I li.l I Ч± шжашшм / М°т дД 23 шп Изобретение относится к рыбной промы ленности и может быть использовано на рыбоконсервных заводах, выпускающих ксжсервы из мелкой рыбы/например, из сайры. По основному авт. св. № 97Г2О4 И{эвбстна машина апя укладки бы в банки, состоящая из операцконного трак(юртера с кассетами, разделенными на ячеШш апй рыбы, каждая из которых содержит поопружиненные створки копиров, с электромагнитными приводами, снабжен ными блоками управления, фо{Яу|ирукнцей камеры, кассеты для приема порций рыбы, то/шателя механизма поворота по1эдионной камеры. Набивного поршня и механизма выталкивателей кусков рыбы, снабженных электроприводами с блоками управления, тактирующего датчика, задаю щего блока к блока управления машиной с узлом задержки, выходы которого подключены к входам блоков управления электроприводами, датчиков толщины кусков рыбы с блоком преобразования, вычислительного блока, выходы которого, подключены непосредственно и через блок буферной памяти к выходам блока преобразования, регистра посдедовательнотх приближения, выход которого связан с вхоцом вычислительного блока, блока буферной памяти и через блок дополнительн буферной памяти с входами блоков управления электромагнитными приводами копиров, блока допускового контроля, соедине ного входами с выходами вычислительног блока и выходом задающего блока, а выходами - с входом регистра последовательного приближения и входом блока управления машиной, ;при этом последний подключен л выходу тактирующего датчика, а его выходы - к входам блока преобразователя, блокам буферной памяти и вычислителыяому блоку Оу . Недостатком машины является ограниченная точность набора порции из кусков рыбы из-за косвенного метода определения веса порции по максимальной толщине кусков. Целью изобретения является повьпие- ние точности набора порций из кусков рыбы. Поставленная цель достигается тем, что машина для укладки рыбы в банки, состоящая из операционного транспортера с кассетами, разделенными на ячейки для , каждая из которых содержит подпружиненные створки копиров с электр магнитными приводами, снабженными блоками управления, формирующей камеры. кассетъ для приема порции рыбы, толкателя механизма поворота порционной камеры, набивного пориня и механизма выталкивателей кусков рыбы, снабженных электроприводами с блоками управления, тактирующего датчика, задающего блока и блока управления машиной с узлом задержки, выходы которого подключены к входам блоков управления электроприводами, датчиков то1ш1ины кусков рыбы с блоком преобразования, вычислительного блока, выходы которого подключены непосредственно и через блок буферной памяти к выходам блока преобразования, регистра последовательного приближения, выход которого связан с входом вычислительного блока, блока буферной памяти и через блок дополнительной буферной памяти с входами блока управления электро-: магнитными приводам копиров, блока допускового контроля, соединенного входами с выходами вычислительного блока и выходом задающего блока, а выходами - с входом регистра последовательного приближения и входом блока управления машиной, при этом последний подключен к выходу та сТируюшего датчика, а его выходы - к входам блока преобразователя блоком буферной памяти и вычислительному блоку, снабжена последовательносоединенными датчиком веса порции рыбы, блоком преобразования и дополнительным вычислительным блоком, при этом выход последнего подключен к задающему блоку. На фиг, 1 показано устройство для .укладки рыбы в банки, вид сверку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - 4ункиионал:7ная схема системы управления. Машина а,ля укладки рыбы в банки состоит из операционного транспортера 1, по ходу движения которого расположены узлы, производящие необходимые операции над рыбой перед ее укладкой в банки. Операционный транспортер 1 содержит кассеты 2, разделенные на ячейки, каждая из которых имеет подп йжиненные створки 3 для захвата рыбы (а в дальнейшем ее кусков) и шток 4 для их раскрытия. Под транспортером i расположена неподвижная кассета 5 для приема кусков рыбы, выпадающих из ячеек кассет, когда происходит их раскрытие с помощью копиров 6-9. Копиры 6 объединены общей траверс и с помощью электромагнитного привода 1О перемещаются в направлении вверхвниз. КЬ пиры 7-9 также снабжены соответствующими электромагнитными приводами 11 -IS и могут перемешаться независимо аруг от цруга,- что дает воа можность варьировать количеством куоков рыбы в . В пазы непоавижной кассеты 5 вхоаят выталкиватели 14 с электроприводом 15 и конечными выключателями 16, ограно чивающими их перемещение. С пс спдыо выталкивателей 14 производится- перемет ние порции в порцисжную камеру 17 ана6 женную злектропривоцом 18 и кс 1ечснь1м выключателем 19. Перемещение порщ рыбы из порционной каме{я 1 17 в форми руюшую камеру 20 произвоцится толкате лем 21 ( совершакшим посредством элек1 тролривода 22 возвратнонпоступательное движение. Ограничение хода толкателя 21 осуществляется конечным ш иш очатеяем 2 Наполнение банки производится набивным поршнем 24 с электроприводом 25 и, конечным выключателем 26. Мвханиз. мом 27 осуществляется поовоо пустых и отвод наполненных банок. Раскрытие створок 3 кассет 2 в зоне укладки рыбы осуществляется неподвижным копиром 2S. Измерение максимальной толШгаШ; кусков рыбы, лежащих в створках Э ячеек 2, осуществляется с помсщью автчя ков толщины - фотоп{Я1емников 29 с осветителями (не показаны) которые yt тановлены неподвижно относительно што ков 4 кассет 2 и фиксируют положение, которое щтоки 4 принимают в Зависимост от толщины кусков рыбы, лежащих в створках 3. Блок 30 преобразования преобразует информацию о толщине кусков рЬ1бы в двоичный код. Выходы блока 30 поцклк « чены к первому вьпислительному блоку 3 непосредственно и через блок 32 буферной памяти. Регистр 33 последовательного приближения обеспечивает ввод информации с блоков 30 и 32 в вычислительный блок 31 и в блок 34 дополнительной буферной памяти. К вьпсоду вычясп тельного блока подключен блок 35 аопускового контроля с задающим блоком 3 G помощью которого зааается установка на количество кусков рыбы в пориий, исходя из максимальной толщины куска рыбы, размера банки и заданного допуска. Управление блоками 30 - 34, а такж блоками 37 - 40 управления электроприводами 18, 15, 22 и 25, соответственно, поворота порционирующей камеры, выталкивателей кусков рыбы, толкателя и набивного поршня, и блоками 41 - 44 управления электромагнитными п| одами 10-13 осуществляется посредством блока 46 управления с такл иру1о щим датчиком 46. Измерение веса порции, лежащей в неподвижной кассете 5, осуществляетч я с помощью датчика 47 веса, например индуктивного типа, блока 48, обеспечивающего преобразование веса порции в пропорционалы ый лналоговый сигнал, который поступает на вход пополнительного вычислительного блока 49. Задающ боок 36 содержит два потенциометра 5О и 51, одним из которых задается нижний, а другим - верхний препел допуска на количество кусков порции, исходя из максимальной толщины кусков , нстрчйик 52 эталонного напряжения и резистр 53, подключенный к выходу доцолнителыюго вычислительного блока. Последний включает сумматор 54, один 83 входов которого является входом попоянительнсоо вычислительного блока, а {|ругЫ1 1юаключен к источнику 55 эталонного напряжения, аналоговый ключ 56, емкость 57 и повторитель 58, образуку ише аналоговую запоминающую ячейку. Датчиком 47 веса и блоком 48 нреобразования (шрецеляется вес порции, лежащей и кассете 5, а затем посредством сумматора 54 скгнал поанастр Я1ки. Схема, состоящая из ключа 56, емкости 57 н повто(1теля 58, по сигналу блока упра ления фиксирует на резисторе 53 н шряжение поднастройки, ко|;фектируя установку, задает &1оку 35 йопускового коитроля задающий блок 36. Величина и знак напряжения поонаст{ХмИся опреаеляют соотнощением Л. настр ® i п - а,) гае , - предыдущее значение веса itopHHK рыбы (величсша, про, порцисжальная выходному сипналу блоха 48); заоакное значение веса порции (величина, пропорциональная напряжению источника 55); а - стсьтистический коэффициент регрессии, связывающий напряжение поднастройки с разностью предыдущего и зааан ного весов ПО1ЖИИ. УстрсАство работает следующим образом. Рыбу укяааывают брюшком вверх в кассеты, стройки 3 которых раскрыты посредством копира 28, н непре1х 1вно транспогтируют на разделку, далее куски рыбы, удерживаясь створками 3 кассет 2, поахоаят к месту, гае установлены фотоприемники 29 с осветителями. Работа всех блоков устройства с помо щью тактирующего аатчика 46 синхронизирована с цвижением транспортера 1. В {взультате, когаа поперечная ось кассеты 2 проходит относительно оси установки фотоприемников и осветителей, на вых де блока 45 управления появляется импульс, запускающий в работу блок ЗО. В мсмент пересечения штоками 4 луча света от осветителей к фотоприемникам 29, блок ЗО прекращает свою работу, фиксируя на своих выходах информацию, соответствующу1р в авичном коде максимальней толщине кусков рыбы, лежащих в створках 3 кассет 2. С помощью регистра 33 последовател ного приближения, выдающего на своих выходах единичные сигналы, информация толщине кусков рыбы с блока ЗО последо вательно вводится в вычислительный блок 31, где накапливается, а регистр 3 останавливается. При поаходё к следующе кассете 2 процесс повторяется, т.е. производится измерение максимальной толщины кусков рыбы, лежащей в ячейках, и ввод этой Ш1формации в вычислительный блок 31 с пед сацью регистра 33. Такой режим набора повторяется до тех пор, пока на вькодах Qj О бло ка 35 допускового контроля будут соответственно нулевая и единичная информации. Ситуация, когда на выходах Q и а нулевые сигналы, означает, что добавлени куска к порхии ее вес за пределы макси льнрго допуска, В этом случае сигналом а аннули тся только что вводимая информация в блок 31и обнуляется первый выход регистра 33. Если состояние выходов изменяется соответственно, на единичное,п{ж вводе информации только о последнем куске рыбы, лежащем в кассете (из трех для иащего случая), то два выхода регистра 33 находятся в нулевом состоянии, а третий - в единичном В этот момент блок 45 управления нач.инает последовательно с частотой, превышающей частоту тактирукяцего датчика 46, выдавать сигналы. Одним из сигналов производится запись в блок 32 буферной памяти информации и толщине первого и второго кусков рыбы, не вощед uiwi в порцию, а в блок 34 дополнительней буферной памяти - единичнЬй информации о третьем куске рыбы, вощедщем в порцию, другим сигналом - стирание информации с блока 31} третьим - пятым сигналом - запись информации с блока 32 буферной памяти в вычислительный блок 31, и щестым сигналом - обнуление блока 32 буферной памяти. Следующим сигналом с выхода бпо ка 45,синхр(жизированным с движением транспортера, включаются электромагнит ные приводы 1О и 13. Копирзы 6 и 9 опускаются, производится преобразование многорядного потока кусков рыбы в однорядный и в неподвижной кассете 5 располагается порция, например, рассматриваемого случая, из десяти кусков рыбы. С помощью датчика 47 веса и блока 48 преобразования произвоаится определение ее веса. Дополнительный вычислительный блок 49 определяет требуемое напряжение поднастройки. Выходным сигналом с блока 45 это напряжение устешав- ливается на выходе блока 49, корректируя установку блока 36 для следующей набираемой порции. Одновременно с опусканием копиров выходной сигнал с блока 45 через блок 38 включает электропртюод 15 выталкивателей 14 кусков рыбы из кассеты 5. Происходит движение выталкивателей 14 вдоль ячеек кассеты 5 и весь ряд кусков рыбы оказывается в по1щйонной камере 17. При срабатывании конечного вьишючате- ля 16 происходит останов двигателя 15. Сигналом с блока 45 производится сброс буферной памяти с блока 34, реверс двигателя 15, возвращение выталкивателей 14 в исходное состояние и поворот порционной камеры 17 двигателем 18 на 18О с целью изменения положения кусков рыбы. Ограничение поворота камеры 17 осуществляется конечным выключателем 19, Следующий сигнал блока 45 вызывает включение эле ктроавигателя 22 толкателя 21 через блок 39. Толкатель 21 выталкивает порзию из камеры 17 в формирующую камеру 2О. Затем происходит обратное движение толкателя 21 и перенос набранной пораии поршнем 2.4, при- веде}1ным в действие по сигналу блока 45 электроприводом 25, в консервную банку, установленную против поршня 24. После возврата поршня 24 в исходное состояние, которое фиксируется конечным вьоийочатедем 26, процесс набора следукпоей порции повторяется. Введение в мащину для укладки куоков рыбы в банки датчика веса порции с блоком преобразсюания и дополнительного вычислительного блока позволяет довести процент набираемых порций из кусков рыбы по существующим в настоящее время нормам цопуска цо 10О%. Кроме того, благоааря высокой точности набора пор-ВИЙ, можно снизить величины допуска на вес набираемой порции почти в ова раза, что составит, например, при произвоастве консервов (сайра бланшированная в мао ле) от - 0,0 f4% от веса банки, вместо сушествукжих норм от -4 цо +8%. Сни- женне допуска значителыю снизит расход
дефицитного масла и, тем самым, повысит экономические показатели процесса пронэвоцства :жонсервов,
В целом использование данной машины для укладки р1ыбы в байки в линии для производства ксмсервов из сайры позволяет получить (условно) годовой экономический эффект в расчете на одну линию, равный 26ОО руб.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для укладки рыбы в банки | 1980 |
|
SU971204A1 |
| Машина для укладки рыбы в банки | 1979 |
|
SU822802A1 |
| Устройство для укладки рыбы вбАНКи | 1979 |
|
SU820777A1 |
| Устройство для разделки и укладки рыбы в банки | 1973 |
|
SU477712A1 |
| МАШИНА ДЛЯ УКЛАДКИ РЫБЫ В ЦИЛИНДРИЧЕСКИЕ БАНКИ | 1962 |
|
SU151607A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫБЫ | 1970 |
|
SU285761A1 |
| УСТАНОВКА ДЛЯ РАЗДЕЛКИ И УКЛАДКИ РЫБЫ В БАНКИ | 1973 |
|
SU406523A1 |
| Устройство для наполнения банок рыбой | 1981 |
|
SU1008089A1 |
| Устройство для отделения порции рыбы | 1973 |
|
SU498218A1 |
| В. Ф. КОСОЕ, Н. Ф. Славинский, И. П. Смирнов, В. Я. Фрадкин,Э. И. Фролович, Н. Н. Чепрасов, Н. А. Швабская и В. Н. Коржов | 1970 |
|
SU270488A1 |
fBWWVWgVg
} т i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для укладки рыбы в банки | 1980 |
|
SU971204A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
