Изобретение относится к кашино- ;строению5 а именно к роботам и манипуляторам, обслуживающим станочные автоматические линии по изготовлению деталей типа тел вращения.
Целью изобретения является расширение технологических возможностей схвата путем захвата деталей за на I ружную и внутреннюю поверхности,, I уменьшение габаритов и повышение на- I дежности -путем исключения перекоса детали при ее досылке. : На фиг. 1 изображено устройство, i общий вид; на фнг. 2 - вид А на
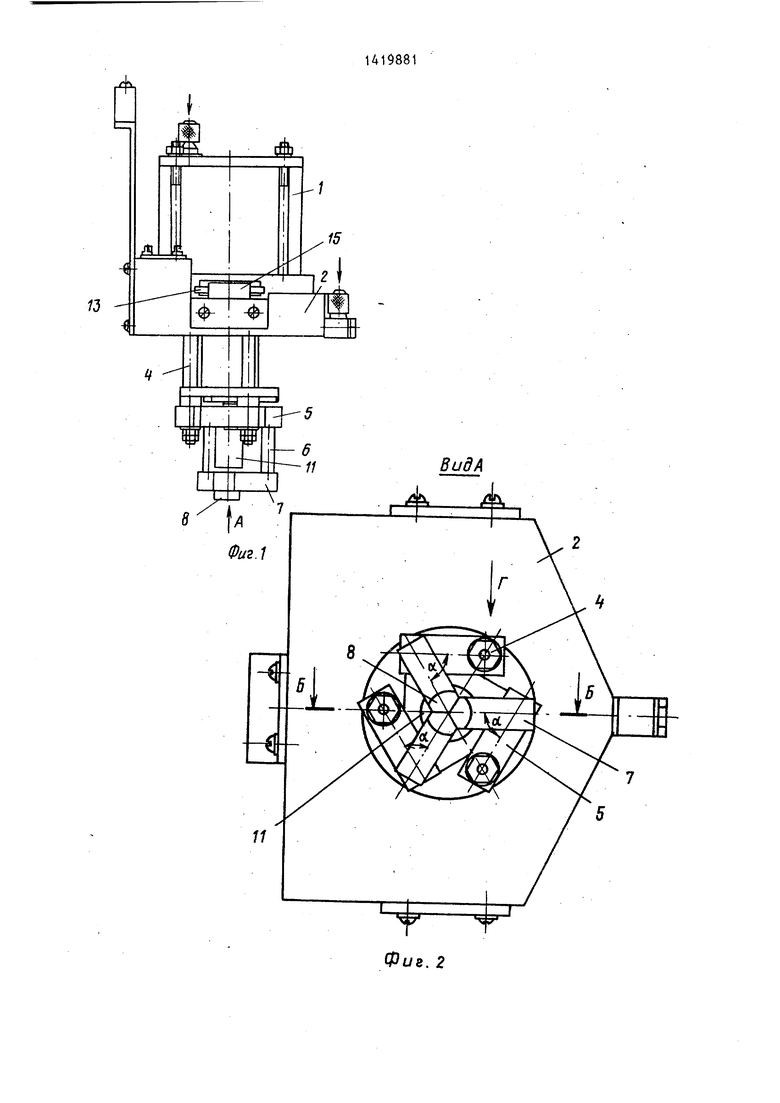
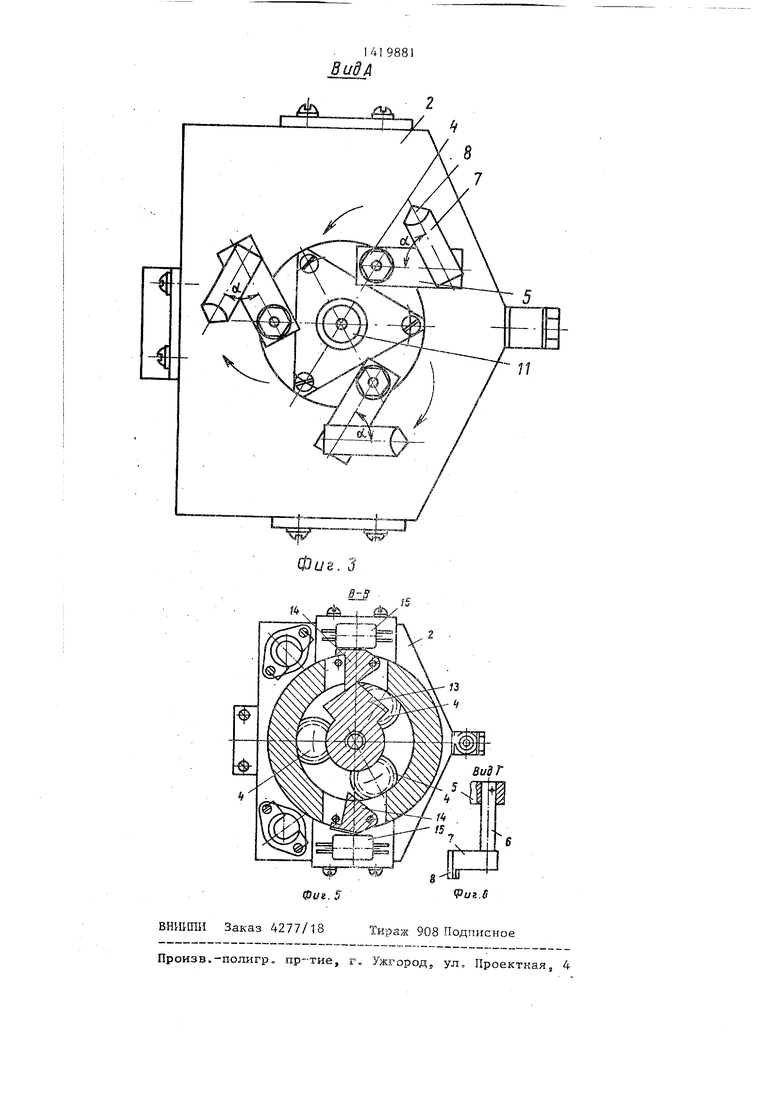
фиг. 1, губки сдвинуты; на фиг, 3- I то же, губки разведены; на фиг. 4- ; сечение Б-Б на фиг, 2; на фиг с 5 - ; сечение В-В на фиг. 4; на фиг. 6 -вид
Г на фиг. 2 о
Схват состоит из ротационного пневмоцилиндра I со штуцерами входа и выхода воздуха 5 соединенного с корпусом 2 приводного цилиндра досылки. На роторе цилиндра 1.насажена ведущая шес терня 3, входящая в зацепление с тремя шестернями 4,, выполненными за одно целое с валамиj на концы которых насажены съемные планки 5, в которые вставлены оси 6 элементов залшма в виде губок 7 с выступами 8„ предназначенными для контакта с деталью,
В корпусе 2 по оси схвата. располоясен подпружиненный поршень
с подпружиненньич толкателем 10 механизма досылки внутри него, на конец которого навинчен боек 11, В цилиндре выполнен канал 12 для подачи воздуха к. поршню 9 J
На ступице шестерни 3 установлен сектор 13 прижатый к одному из пово ротных рычагов 14 микропереключателя 15.
Губки 7 установлены относительно планок 5 Под углом и с возможностью его изменения,; что позволяет расширить диапазон размеров .кгеталей при захвате,,
Схват работает cJIeдyюш :м образом.
Исходное положение для захвата детали за нар пкную поверхность (фиг, 2) - губки -сдвинуты к центру схвата, боек 11 находится за губ- KaNM 7.
После пода(и воздуха в ротационный пневмоцилиндр 1 птестерня 3 враш.а ет по часовой стрелке Егестерню 4 со
1
. „
10
к.
о -
.
а-
98812
съемной планкой 5, соединенной с осью 6 губки 7 с выступом 8. При этом сектор 13 через поворотньп рычаг 14 отключает микропереключатель 15.
Вращением шестерни 3 в обратную сторону производится зажим детали цилиндром 1 и транспортировка ее в раствор губок патрона станка (не показан) «
От команды с пульта робота подается воздух в канал 12 корпуса 2 приводного цилиндра, и поршень 9 через Толкатель 10 механизма досыпки и
|ij боек 11 осуществляет досылку детали до упора в базу патрона станка. После этого происходит разжим губок 7. Далее осуществляется зажим обрабатываемой детали губками патрона
-JQ станка и втягивание бойка 11 в исходное положение. Цикл закончен.
Для захвата детали за внутреннюю поверхность работа схвата осуществля- 2g ет.ся в обратной последовательности.
Формула изобретения
1t Схват5 содержащий силовой ро. . тационный цилиндр, на роторе которого установлена шестерня, находящаяся, в зацеплении с шестернями, закреп- ленньми на валах, несущих планки с элементами захвата, и механизм досылки детали, отличающийся
iS тем, что, с целью расатирения технологических возможностей путем захвата деталей за наружную и внутреннюю поверхности при широком диапазоне размеров и уменьшения габаритов, эле40 менты захвата выполнены в виде губок с вь ступами для контакта с захватываемой деталью, закрепленных на осях, размещенных на планках, при этом губки установлены относительно пла45 нок под углом и с возможностью его изменения.
2, Схват поп, 1, отличающийся тем, что, с целью повьшзе50 НИН надежности путем исключения пере-коса детали при ее досылке и уменьшения габаритов, механизм досылки выполнен в виде силового хщлиндра, внутри поршня которого установотен
55 подпружиненный толкатель, несущий боек, при этом боек расположен вдоль оси схвата за губками.
13
11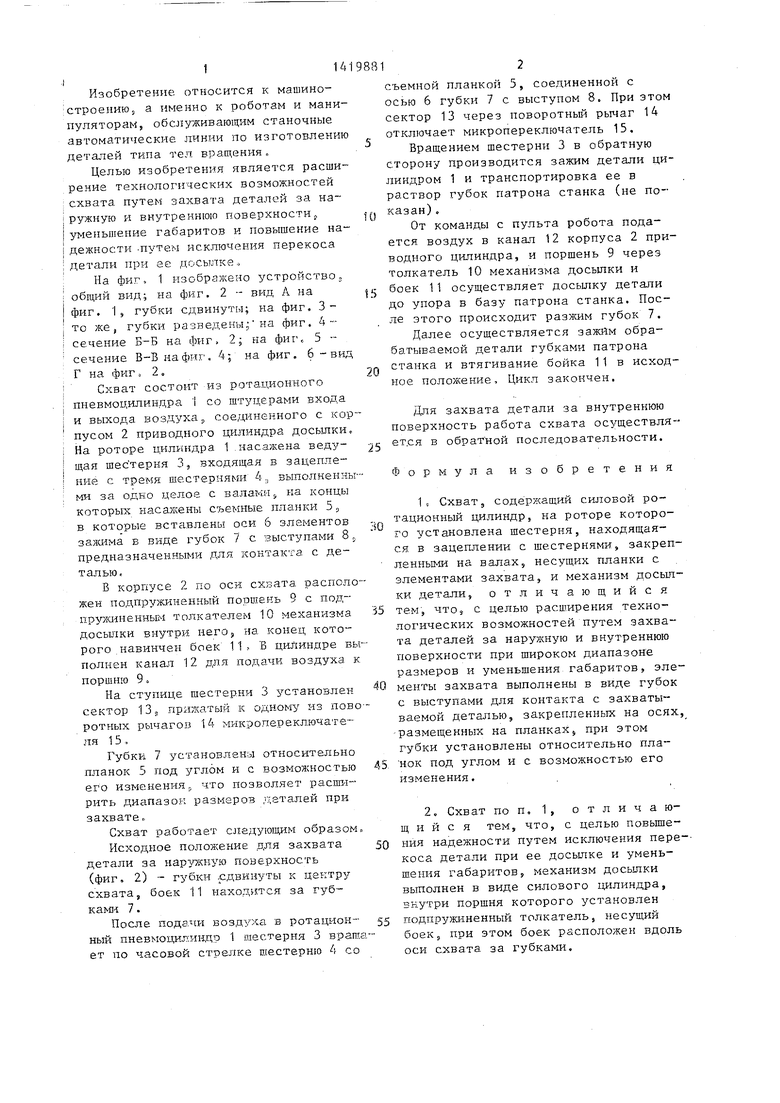
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1982 |
|
SU1024271A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват промышленного робота | 1979 |
|
SU776914A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Схват манипулятора | 1984 |
|
SU1301696A1 |
| Схват промышленного робота | 1978 |
|
SU673448A1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
Изобретение относится к машиностроению, а именно к роботам и манипуляторам, обслуживающим станочные автоматические линии по изготовлению деталей типа тел вращения. Цель изобретения - расширение технологических возможностей схвата путем захвата деталей за наружную и внутреннюю поверхности, уменьшение габаритов и повьшение надежности путем исключения перекоса детали при ее досылке. Это достигается тем, что ротационньй пневмоцилиндр 1 с ротором соединен с шестерней 3, находящейся в зацеплении с шестернями 4, вьшолненными за одно целое с валами. На концах валов установлены планки 5, несущие элементы захвата в виде губок 7 с выступами 8, которыми схват контактирует с зажимаемой деталью. По оси схвата установлен механизм досьшкя, выполненный в виде пневмоцилиндра, внутри поршня 9 которого размещен подпружиненный толкатель 10, несущий боек 11. При вращении шестерни 3 происходит поворот губок 7. При этом в зависимости от их поворота по часо- вой или против часовой стрелки происходит зажим или разжим детали. 1 з.п. ф-лы, 6 ил. 5-В J « 4 СО 00 СХ5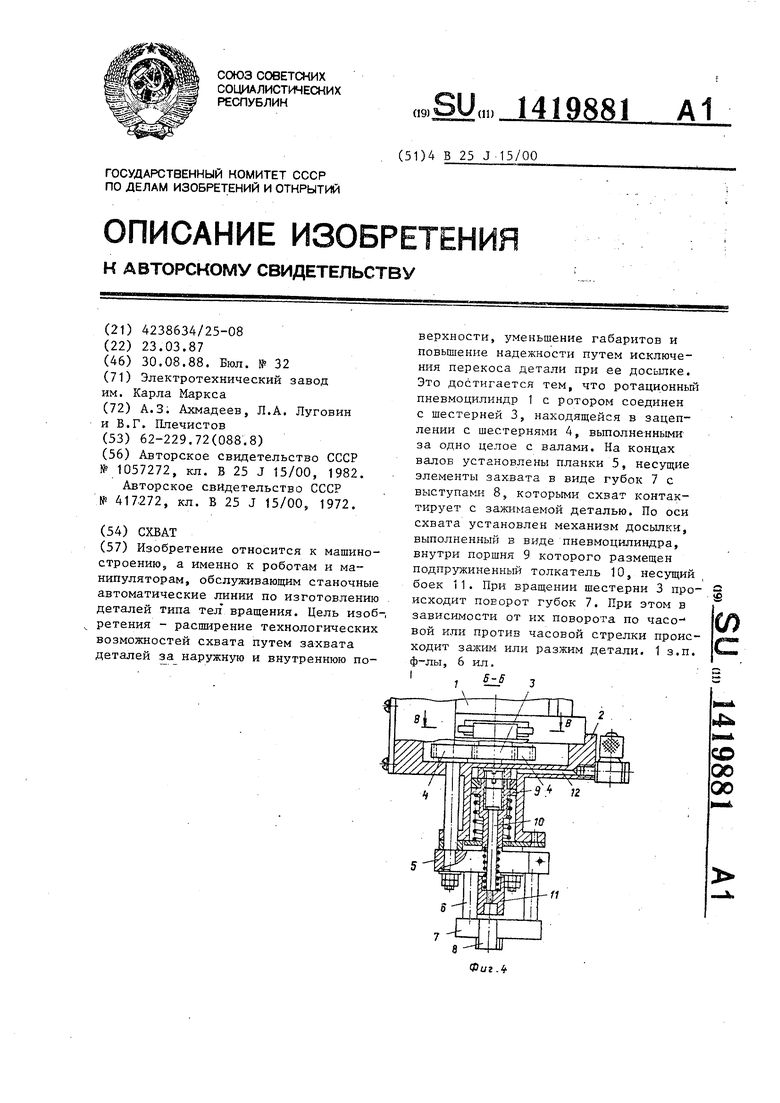
Фиг. 2
.
фуг, 5
ВНШШИ Заказ 4277/18Тираж 908 Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
| Схват | 1982 |
|
SU1057272A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Трубчатый паровой котел для центрального отопления | 1924 |
|
SU417A1 |
