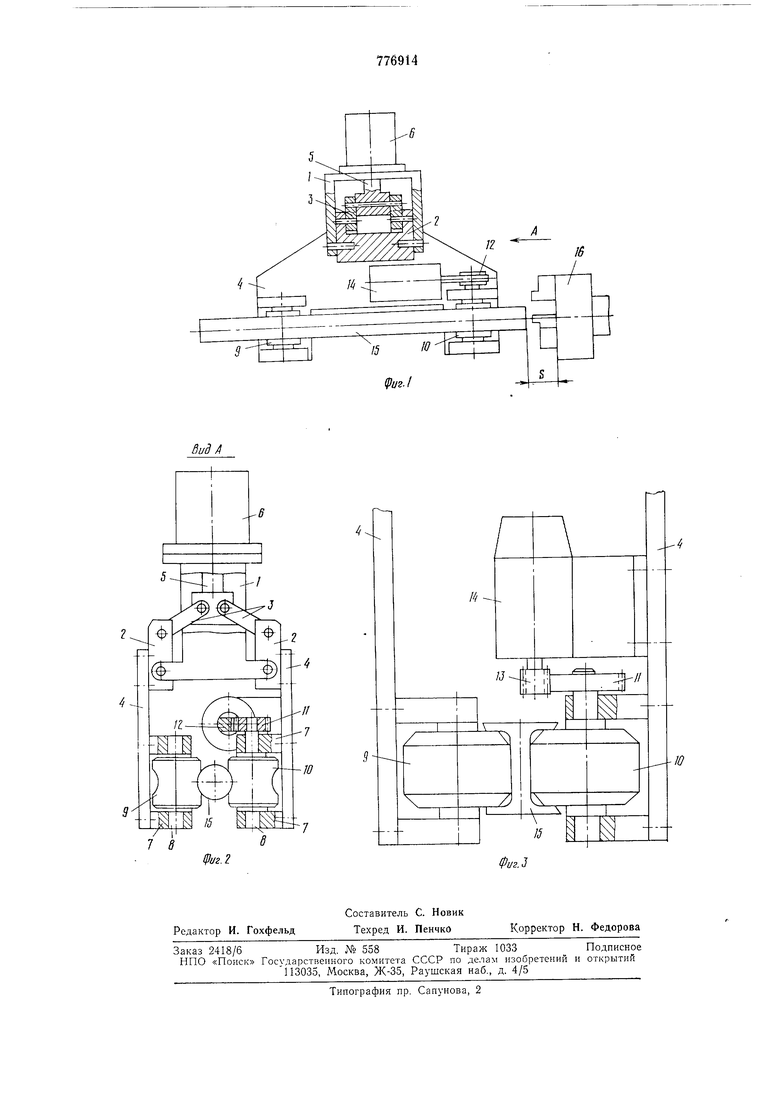
Магической цепью составляют механизм досылки. Ролики 9 и 10 выполнеиы профилированиыми в зависимости от профиля зажимаемой в иих детали 15, например детали тииа «швеллер, которую необходимо дослать до упора в торец токарного патрона 16, либо в рабочую зону станка, калильиой печи и т. д. (не изображена). В первом варианте, изображенном на фиг. 1 и 2, привод 14 представляет из себя гидро(пневмо) цилиндр, выходной конец штока которого одновременно является рейкой 12, входящей в зацепление с зубчатым колесом И. Во втором варианте, изображенном на фиг. 3, в качестве привода 14 использован электродвигатель.
Схват работает следуюпхим образом.
Схват, изображенный на фиг. 1 и 2, ориентирует зажатую в роликах 9 и 10 деталь 15 соосно патрону 16 на некотором расстоянии 5 от его торца (фиг. 1). По сигналу срабатывает привод 14 механизма досылки детали в осевом направлении. При этом шток (рейка 12) выдвигается в направлении к патрону 16, поворачивая через зубчатое колесо 11 ролик 10, перемеш,ая за счет фрикционного сцепления длинномерную цилиндрическую деталь 15 в том же направлении. После достижения торцом детали 15 торца патрона 16 привод 14 отключается. Как только кулачки иатрона 16 зажмут деталь 15, привод 6, втягивая шток 5, разводит губки 4. Деталь 15 освобождается от зажима.
В таком состоянии схват готов к операции извлечения детали 15 из патрона 16. Для этого после обработки детали 15 поступает сигнал на иривод 6, который сводит губки, зажимая деталь между роликами 9 и 10. После разведения кулачков патрона 16 включают обратный ход привода 14. Рейка 12, перемешаясь в направлении от патрона и вращая ролик 10, выдвигает деталь 15 из патрона 16 на то же расстояние S, после чего привод 14 отключается.
Если схват осуществляет только операцию загрузки деталей в патрон, то всякий раз после раскрытия губок 4 схвата, т. е. после освобождения детали 15, достаточно возвращать приводной ролик 10 в исходное положение, подав сигнал обратного хода
на иривод 14. Рейка 12, втянувш 1сь до упора, переместит ролик 10 в обратном направлении.
Схват, изображенный на фиг. 3, обладает возможностью перемещать детали, зажатые между роликами 9 и 10 на бесконечно большие расстояния. Д.чя этого достаточно включить привод 14 - электродвигатель, который через шестерню 13 и колесо 11 приводит в непрерывное вращение приводной ролик 10. Если в качестве привода 14 применить реверсивный электродвигатель, то деталь 15 можно перемещать в двух противоположных направлениях - в зону обработки и обратно.
Применив в качестве привода 14 шаговый двигатель, можно перемепхать деталь 15 шагами с выдержкой времени между шагами, что удобно, например, ири штамиовке изделий.
После разведения губок 4, т. е. после освобождения детали 15, такой схват всегда готов к работе, так как не требует возвращения ролика в исходное положение.
Формула изобретения
1.Схват промышленного робота, содержащий корпус с шариирио-ирикреиленными к нему губками, привод перемещения губок и механизм досылки деталей, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен закрепленными на губках роликами, один из которых кинематически связан с механизмом досылки.
2.Схват по и. 1, о т л и ч а ю ш и и с я тем, что мехаиизм досылки деталей размещен на одной из губок схвата.
3.Схват по п. 1, отличающийся тем, что, с целью повыи1ения точности ориентации захватываемой детали, ролики выполиеиы профилироваииыми в соответствии с профилем детали.
Источники информации, припятые во внимание при экспертизе
1.Сборник «Конструкции и применение промышленных роботов в механической обработке, ПИИМАШ, серия C-I, М., 1976, с. 29.
2.Авторское свидетельство СССР 580114, кл. В 25J 15/00, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| Схват | 1984 |
|
SU1184663A1 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват | 1982 |
|
SU1093543A1 |
| Автооператор | 1984 |
|
SU1191256A1 |