Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических нроцессов, и может быть исцользовано в конструкцнях манинуляторов, обслуживающих ноточные линии обработки труб и про(эильного проката.
Известен захват манинулятора, содержащий корпус, привод, двухстержневую тягу t 3a KHMHi,ie губки, одна из которых вынолнена 1;()Д15ижной 11.
Медостатком ziaHHorb захвата является ограниченная надежность удержания груза при наличии ударных н вибрационных нагрузок.
lle-ib изобрете1Н)я - новышенне надежности зажима.
Поставленная цель достигается тем, что за.хваг манипулятора, содержащий корпус, привод, двухстержневую тягу и зажим ые 1убки, одна из которых вьнюлнена нодкижной, снабжен нружинным пакетом, криiJoiiuiHOM и связанной с ним зубчато-реечной передачей, привод выполнен в виде силового ци.. двухстороннего действия, поршни которого связа1пм с зубчатой рейкой указанной передачи, кривошип ишрнирно связан с двххстержневой тягой, причем стержни гягп соединепы телескопически, а .между ппми c.ic))овап пружинный накет.
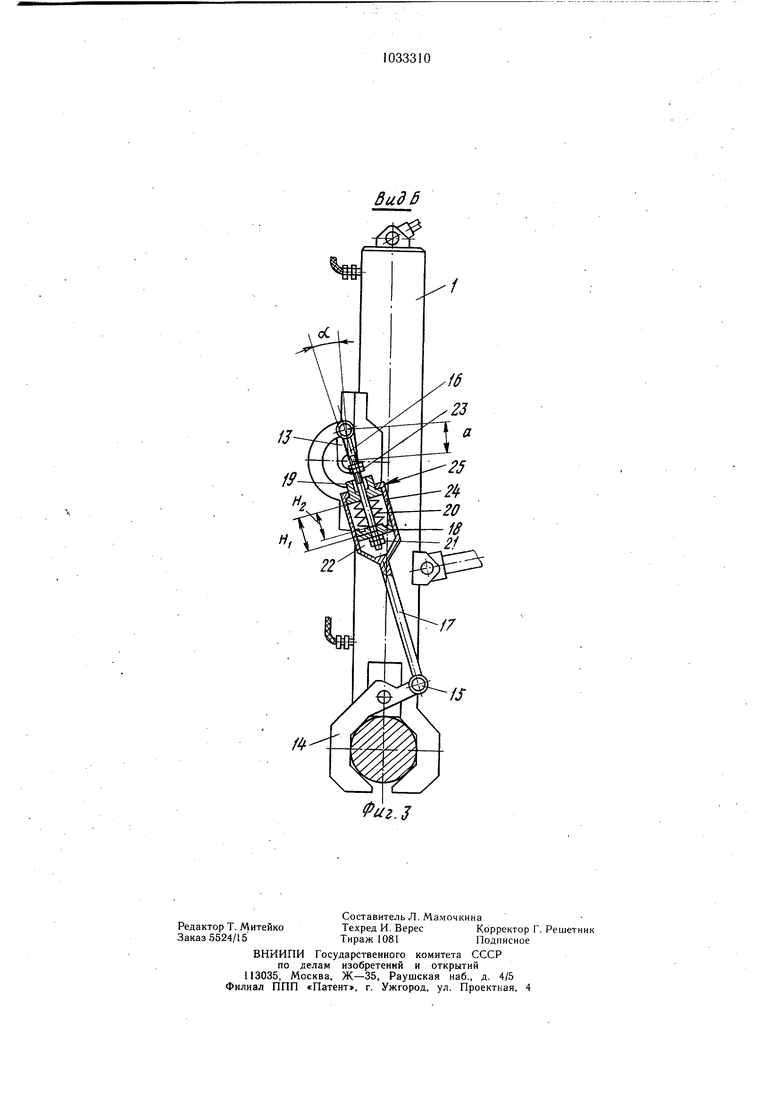
На фиг. I изображен, захват мапипуляTojia; па фи1. 2 - сечение А-А на фиг. 1; иа фиг. 3 вид Б на фиг. 2.
Захват манипулятора состоит из корпуса , .механизм; при.вода захвата, встроенпо1Ч) в корпус и состоящего из зубчатой 2, цилиндров 3 н 4, стакана 5 с опорiibhvu втулками 6, двух г:Ьрп пей 7 и 8 с уплогпительными .манжета.ми 9. Рейка 2 кинематически связана с зубчатым колесом 10. которое установлено на валу 11 и жестко связано с ним шпонкой 12. На цапфу вала посажен кривошип 13, имеющий эксцентриситет а, а цапфа кривошипа соединена тягоч с подвижной губкой 14 и пальцем 15. Тяга состоит из двух стержней IG и 17. На стержне 16, между упором, 18 и направляющей втулкой 19, смонтирован пакет тарельчатых пружин 20. Упор 18 жестко закреплен на стержне 16 гайкой 21 и зафиксирован шайбой 22. Силовое замыкание пакета пружин, соответствующее
их предварительному поджатию Hj, осуществляется гайкой 23 после установки направляющей втулки 19 в стакан 24 и фиксации ее упорным кольцом 25.
Работает захват манипулятора следующим образом.
При подаче давления в полость в цилиндра 3 поршень 7 перемещает зубчатую рейку 2, которая в свою очередь приводит во вращение по часовой стрелке зубчатое колесо 10, а с ним и вал II с кривошипом 13. Перемещение подвижной губки происходит до полного захвата заготовки 26. Когда заготовка зажата, а движение peiiKH продолжается, кривошип начинает растягивать тягу, сжимая пакет от усилия, соответствующего нредварительному под0 жатию HJ до значения Н, соответствующего максимальному усилию в тяге, определяемому положение.м цапфы кривощипа в верхней мертвой точке. При этом .упор 18, установленный па стержне 16, перемещается но впутрепней поверхности стакана 24. По .достижении порщнем 8 торца цилиндра 3 цапфа кривошипа переходит за мертвую точку на угол л, обеспечив таким образом, «механический замок. Высвобождение заготовки из захвата происходит при подаче давления в полость с цилиндра 4, при этом для отвода подвижной губки 14 требуется приложить усилие, необходимое для преодоления силы, создаваемой деформацией HJ пакета пружин в верхней мертвой точке кривошипа.
Преимущества предлагаемого устройства в сравнении с прототипом состоят в том, что в предлагаемом захвате обеспечивается перерегулировка предварительного ноджатия пакета пружин Hj, кроме того, возможна переустановка пакета на различную жесткость, что позволяет эксплуатировать захват как .цля транспортировки заготовок больших .масс, так и тонкостенных труб.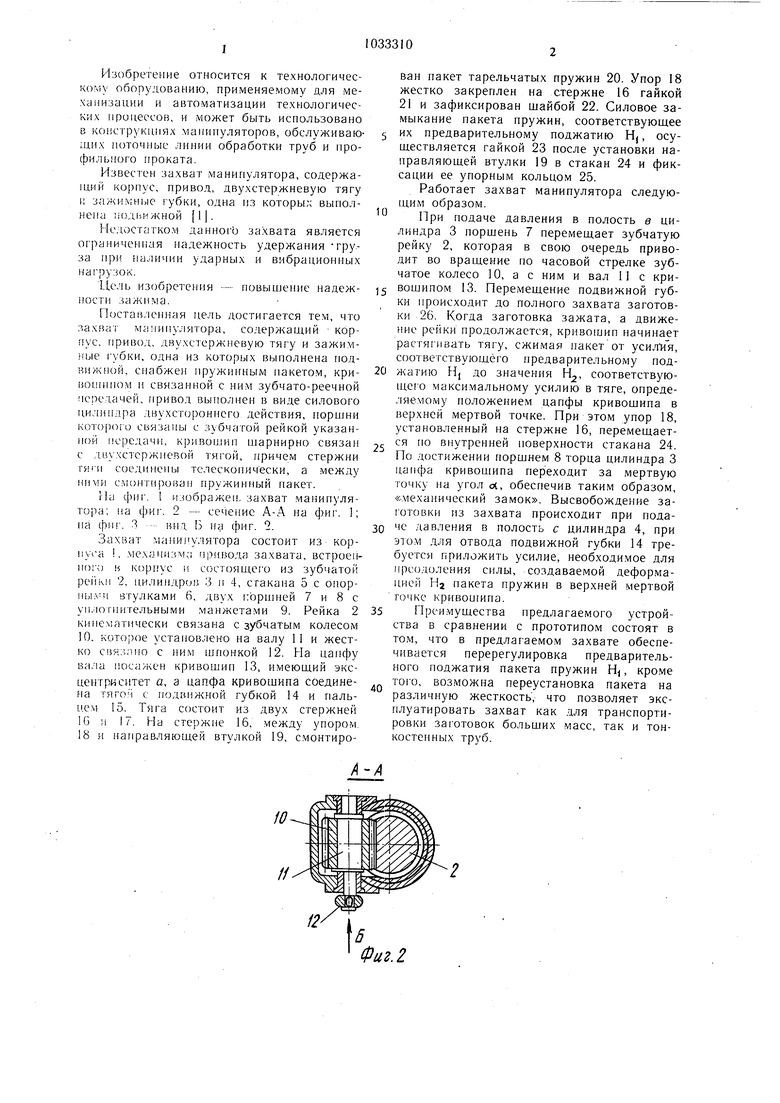
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1315301A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Захватное устройство | 1987 |
|
SU1437218A2 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| СПРЕДЕР ТЕЛЕСКОПИЧЕСКИЙ | 2013 |
|
RU2533620C1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
ЗАХВАТ МАНИПУЛЯТОРА, содержащий корпус, привод, двухстержневую тягу и зажимные губки, одна из которых выполнена подвижной, отличающийся тем. что, с целью повышения надежности Зажима, он снабжен пружинным пакетом, кривошипом и связанной с ним зубчато-реечной передачей, привод выполнен в виде силового цилиндра двухстороннего действия, поршни которого связаны с зубчатой рейкой указанной передачи, кривошип шарнирно связан с двухстержневой тягой, причем стержни тяги соединены телескопически, а между ними смонтирован пружинный пакет. (Л со со 00
иг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
