Изобретение относится к устройствам ддая захвата деталей и может быть использовано для захвата и перемещения деталей в герметизированном объеме и в вакууме.
. По основному авт. св. № 546958 известно устройство для захвата деталей, напри| 1ер, в герметизированном объеме, содержащее силовой привод и захватывающий орган, выполненный в виде трубы Бурдона, соединенных внутренними полостями между собой и с силовым приводом для подачи командного давления l.
Недостатком указанного устройства является ненадежность работы в вакууме , что определяется повышенным схватыванием контактируемых деталей в вакууме, особенно при повышенных температурах вследствие образования ювенильных поверхностей.
Цель изобретений - повышение надежности работы в вакууме.
Поставленная цель достигается теМ что в устройстве для захвата детали на губках жестко установлены пьезокерамические элементы, соединенные , с источником переменного электрического напряжения.
Причем пьезокерамическиё элементы могут быть установлены на губках . со стороны контакта с деталью.
Указанное устройство позволяет значительно уменьшить схватывание между губками и деталью, вследствие NttiKpOBH6ponepeMemeHH в зоне контакта, что обеспечивает повышение надежноЬти зaxвaтa точность позиционирований, а также ресурс работы вследствие уменьшенного износа.
На чертеже изображено предлагаемое устройство.
Устройство состоит из трубок 1
Бурдона, соединительной трубки 2, ; одним концом соединенной с внутренними полостями трубок 1 Бурдона/ а другим концом - с силовым приводом для подачи командного давления ( не показан ) и рабочих губок 3, на поверхностй Т оторых размещены пьезокерамическиё элементы 4 для захвата деталей 5. Пьезокерамическиё элементы 4 соединены с источником 6 переменноS ro электрического напряжения, размещенным вне вакуумного объема.
Устройство работает, следукяцим образом.
При подаче командного давления от силового привода во внутреннюю полость трубок 1 Бурдона происходит перемещение их свободных концов и захват детали 5 рабочими губками 3. При этом на пьезокерамическиё элементы 4 подается переменное напряжение от
5 источника питания.
Благодаря использованию предлагаемого устройства повышается надежность работы, особенно при повышенных температурах, кроме того в 1,3-1,5
0 раза повышается ресурс работы, а также в 1,5-2 раза повышается точность позиционирования.
- . ..
Предполагаемый годовой эконбмичё5 ский эффект от использования изобретения превышает 10000 руб.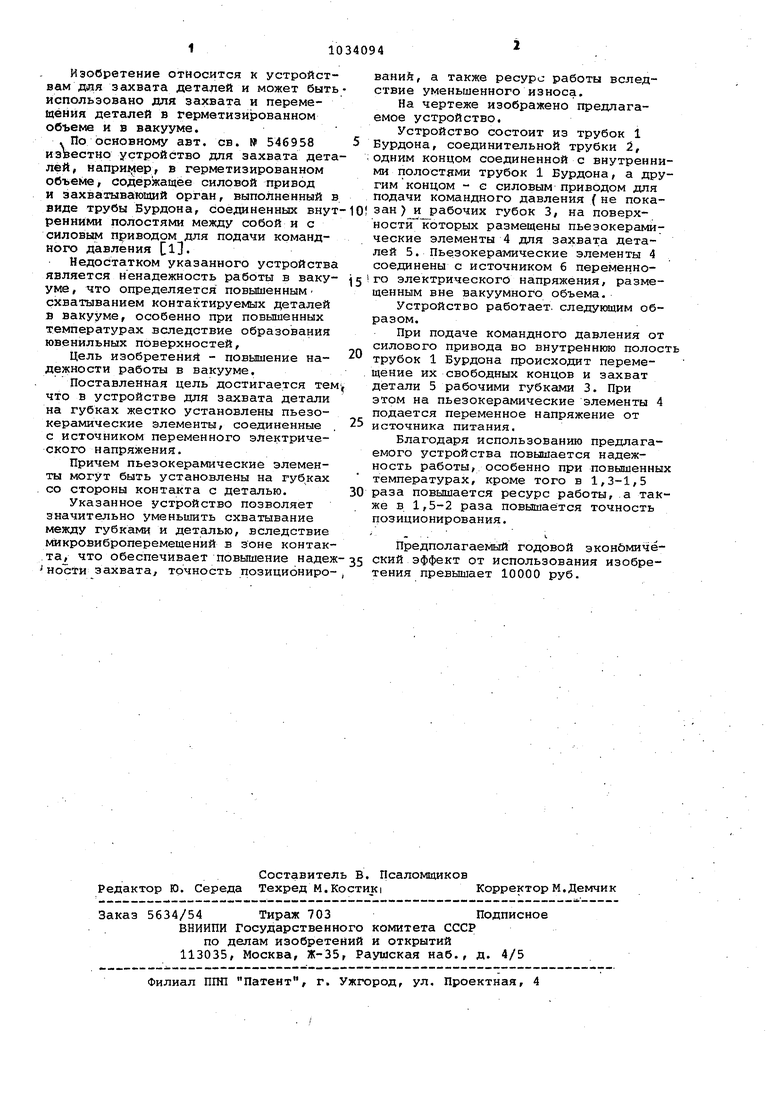
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и юстировки детали | 1977 |
|
SU744775A1 |
| Устройство для захвата детали | 1990 |
|
SU1815222A1 |
| Схват промышленного робота | 1987 |
|
SU1442399A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2018 |
|
RU2706904C1 |
| Схват манипулятора | 1989 |
|
SU1689062A1 |
| Схват манипулятора | 1986 |
|
SU1360981A1 |
| Схват манипулятора | 1984 |
|
SU1271743A2 |
| Вакуумный манипулятор | 1985 |
|
SU1301602A1 |
| МАНОМЕТР ПРЕЦИЗИОННЫЙ | 2008 |
|
RU2391639C1 |
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
1. УСТРОЙСТВО. ДЛЯ ЗАХВАТА ДЕТАЛИ по авт. CBi 546958, о т л и ч а ю вд е ее я тем, что, с цв лью повышения надежности работы в вакууме, на губках жестко установлены пьезокерамические элементы, соединенные с источником переменного электрического напряжения. 2. Устройство по п. 1, отлич а ю ц е ее я тем, что пьезокерамические элементы установлены на губках со стороны контакта с деталью.
