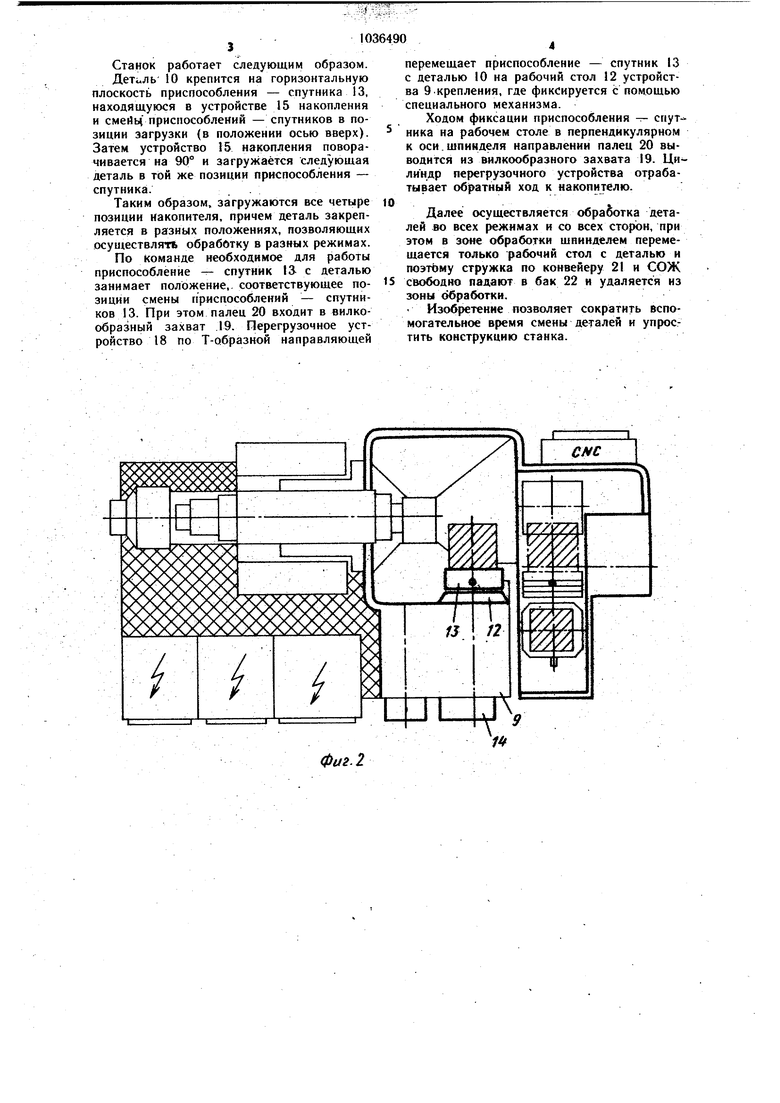
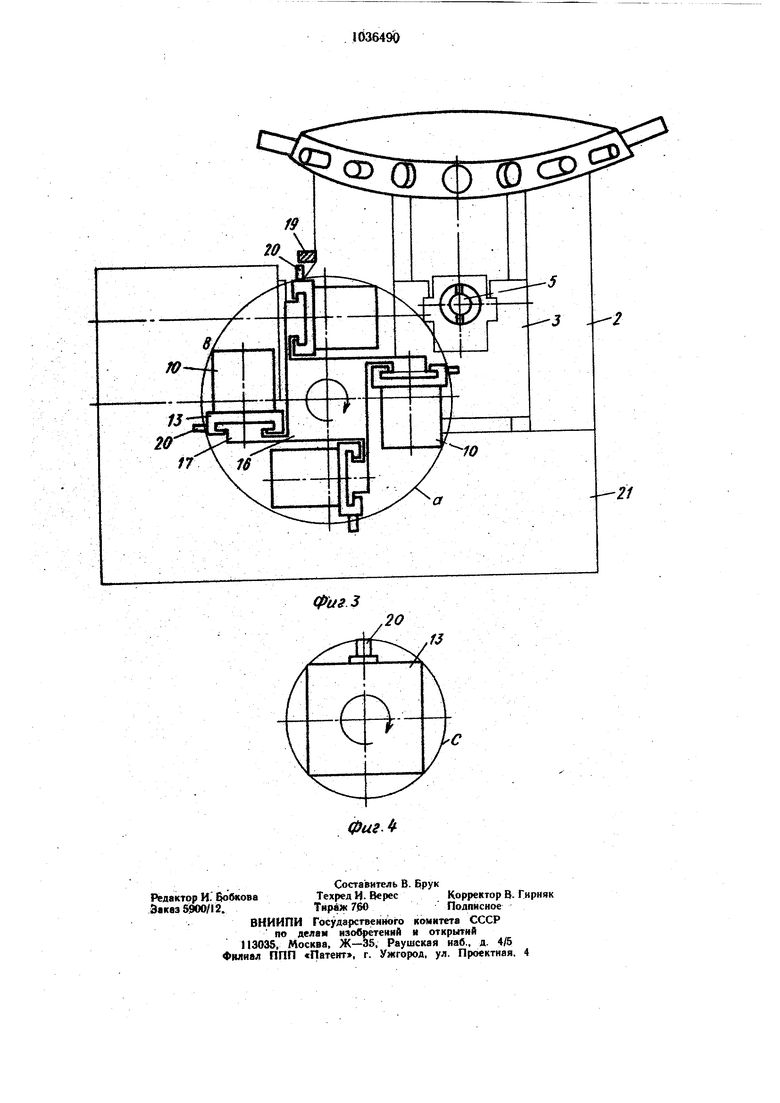
Изобретение относится к станкостроению и касается металлорежущих многоцелевых станков с числовым программным управлением с горизонтальной осью шпинделя. Известен многоцелевой станок, содержащий размещенную на неподвижной стойке шпиндельную бабку с горизонтальным шпинделем, рабочий поворотный стол с горизонтальной осью поворота, перпендикулярной к оси шпинделя, устройство накопления и смены приспособлений - спутников, выполненное в виде многопозиционного поворотного механизма, ось поворота которого параллельна оси шпинделя, а направляющие поворотного механизма в позиции смены расположены в одной плоскости и соосно направляющим рабочего стола. Станок содержит также устройство для перемещения приспособлений - спутников I. Недостатками станка являются затрудненное его обслуживание вследствие сложности конструкции, большие габариты, а также длительность смены изделии, влияющая на производительность станка. Целью изобретения является повышение производительности, упрощение конструкции, и сокращение габаритов станка. Для достижения указанной цели поворотный механизм выполнен в виде крестообразного кронштейна с направляющими, установленными тангенциально относительно оси вращения поворотного механизма Приспособления - спутники снабжены пальцем, установленным на их вне-шней грани, а устройство для перемещения снабжено вилкообразным захватом, расположенным с возможностью взаимодействия с пальцем приспособления - спутника в позиции смены. На фиг. 1 представлен общий вид станка, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку; на фиг. 4 - приспособление - спутник, общий вид. На Г-образной плите 1 установлена н,еподвижно портальная стойка 2 с вертикально перемещающимися в ней санями 3, в которых смонтирован горизонтально перемещаемый по оси Z ползун 4 со шпинделем 5 и приводом главного вращения Инструментального шпинделя {не показан). На верх«ем торце стойки установлена опорная плита 6, на которой расположен инструментальный магазин 7 барабанного типа, ось поворота которого наклонена в . верти-кальной плоскости так, что в процессе смены инструмента его ось располагается параллельно оси шпинделя 5. На плите 1 станка .расположена станина 8, на которой С возможностью перемещения в поперечном относительно оси шпинделя направлении установлено устройство 9 крепления, обрабатываемой детали. |0, на корпусе 11 которого укреплен рабочий стол 12 с горизонтальной осью поворота, перпендикулярной к оси шпинделя. Устройство 9 снабжено механизмом фиксации и зажима (не показан) приспособлений - спутников 13, приводом главного вращения рабочего стола с приспособлением - спутником и приводом круговой подачи с позиционированием через 0,ООГ. В корпусе со стороны, противоположной размещению стола, вмонтирован дополнительный привод 14 вращения стола в токар.ном режиме. Станок снабжен устройством 15 накопления и смены приспособлений - спутни ов, выполненным в виде четырехместного поворотного вокруг горизонтальной оси вращения механизма 16, причем ось поворота механизма перпендикулярна к оси поBCJ OTB рабочего стола, Т-образные направлйющие 17 для приспособлений - спутников расположены так, что их оси в позиции смены параллельны оси поворота стола и находятся с ней на одном уровне. Механизм 16 выполнен в виде установленйых тангенциально относительно оси вращения кронштейнов, на которых расположены направляющие 17 приспособлений - спутников, а приспособления - спутники 13 расположены так, что окружность а, описанная наиболее удаленной от оси рращения устройства накопления и смены приспособлений - спутников гранью приспособления - спутника 13, должна быть , больше или равна окружности, описываемой наиболее удаленной от оси щращения устройства накопления и смены приспособления - спутника 13 точкой в, максимально обрабатываемой на станке детали 10, установленной на приспособлении - спутнике 13. Для перемещения приспособлений - спутников с устройства накопления на рабочий стол станка имеется перегрузочное устройство 18, выполненное в виде гндроцилиндра с вилкообразным захватом 19 на конце штока. На внешней грани каждого приспособления - спутника 13 установлен палец 20 таким образом, что он вписывается в пределы описываюц(ей приспособление - спутник окружности с и одновременно выступает за пределы окру сности а, описанной наиболее удаленной от оси вращения устройства накопления и смены приспособлений - спутников гранью приспособления - спутника 13. Непосредственйо под зоной работы шпинделя в проеме плиты 1 установлен ящик - сбора , или конвейер 21 для уборки стружки из зоны резания, под которым размещен бак СОЖ 22 большой емСтанок работает следующим образом.
Деталь 10 крепится на горизонтальную плоскость приспособления - спутника 13, находящуюся в устройстве 15 накопления и смейц приспособлений - спутников в позиции загрузки (в положении осью вверх). Затем устройство 15 накопления поворачивается на 90° и загружается следующая деталь в той же позиции приспособления - спутника..
Таким образом, загружаются все четыре позиции накопителя, причем деталь закрепляется в разных положениях, позволяющих осуществлять обработку в разных режимах.
По команде необходимое для работы приспособление - спутник 1Я с деталью занимает положение., соответствующее позиции смены приспособлений - спутников 13. При этом палец 20 входит в вилкообразный захват 19. Перегрузочное устройство 18 по Т-образной направляющей
перемещает приспособление - спутник 13 с деталью 10 на рабочий стол 12 устройства 9 крепления, где фиксируется с помощью специального механизма.
Ходом фиксации приспособления - спут- кика на рабочем столе в перпендикулярном к оси.шпинделя направлении палец 20 выводится из вилкообразного захвата 19. Цилиндр перегрузочного устройства отрабатывает обратный ход к накопителю.:
Далее осуществляется обработка деталей во всех режимах и со всех сторон, при этом в зоне обработки щнинделем перемещается только рабочий стол с деталью и поэтому стружка по конвейеру 21 и СОЖ свободно падают в бак 22 и удаляется из зоны обработки.
Изобретение позволяет сократить вспомогательное время смены деталей и упростить конструкцию станка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой станок с ЧПУ | 1983 |
|
SU1090538A1 |
| Многоцелевой станок | 1985 |
|
SU1296357A1 |
| Многоцелевой станок с ЧПУ | 1986 |
|
SU1712127A1 |
| Многоцелевой станок | 1983 |
|
SU1090537A1 |
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |
| Многооперационный станок | 1979 |
|
SU880689A1 |
| Гибкий производственный модуль | 1988 |
|
SU1798122A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Гибкий производственный модуль | 1987 |
|
SU1419852A1 |
| Металлорежущий станок | 1983 |
|
SU1135592A1 |
МНОГОЦЕЛЕВОЙ СТАНОК, содержащий размещенную на неподвижной стойке шпиндельную бабку с торизонталбным шпинделем, рабочий поворотный стол с горизонтальной осью поворота, перпендикулярной к оси шпинделя, устройство накопления и смены приспособлений тГ {- / « спутников, выполненное в виде многопЬзнционного поворотного механизма, ось поворота которого параллельна оси шпинделя, .а направляющие noepgpxHorp механизма в позиции раслоложеНы в одной плоскости и соосйо налравлянощим рабочего стола, и устройство мя { ремещения приспособления сяутияка, отличающийся тем, что, с целью ноаышення производительности, упрощения хояетрукнки и сокращения габаритов станка, ясморотный механизм выполнен в виде fEpecTooC asHort) кронштейяа с наяраяляющняги, установленными та}1ге1«(«алыю относйтепьно оси вращения поао юти0го мёхатэна, а способления -- снутинки, снабжены пальцем, установле нУм ria их .«нешжЙ гранн, а устройство для 1КремеЩеиня снабжено вилкообразным за- . хватом, рас1юлож«1ным с возможностью вэаимояействия с яа.ты1ем приспособления взаимодействуя с .яальцем приспособления - спутника в позиции смены. S 7 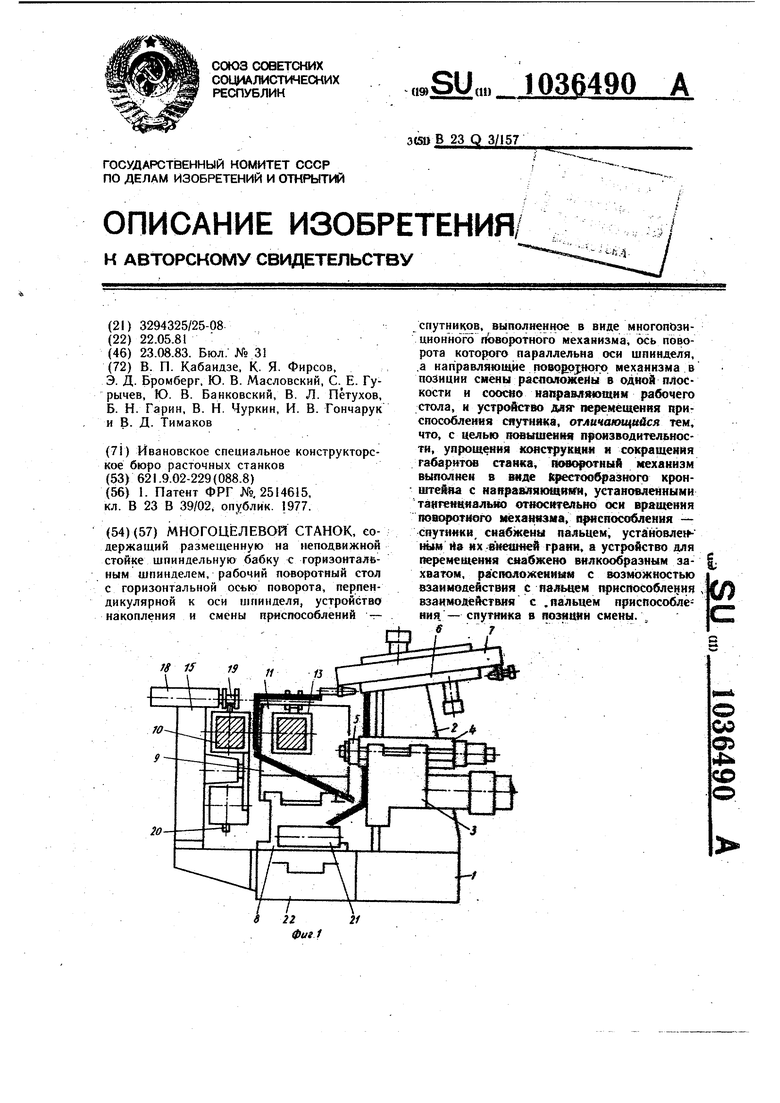
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ №,2514615, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
