Изобретение относится к машиностроению, приборостроению и может быть ис пользовано в различных отраслях народного хозяйства для автоматизации мелкосерийного и единичного производства механообработки. ...
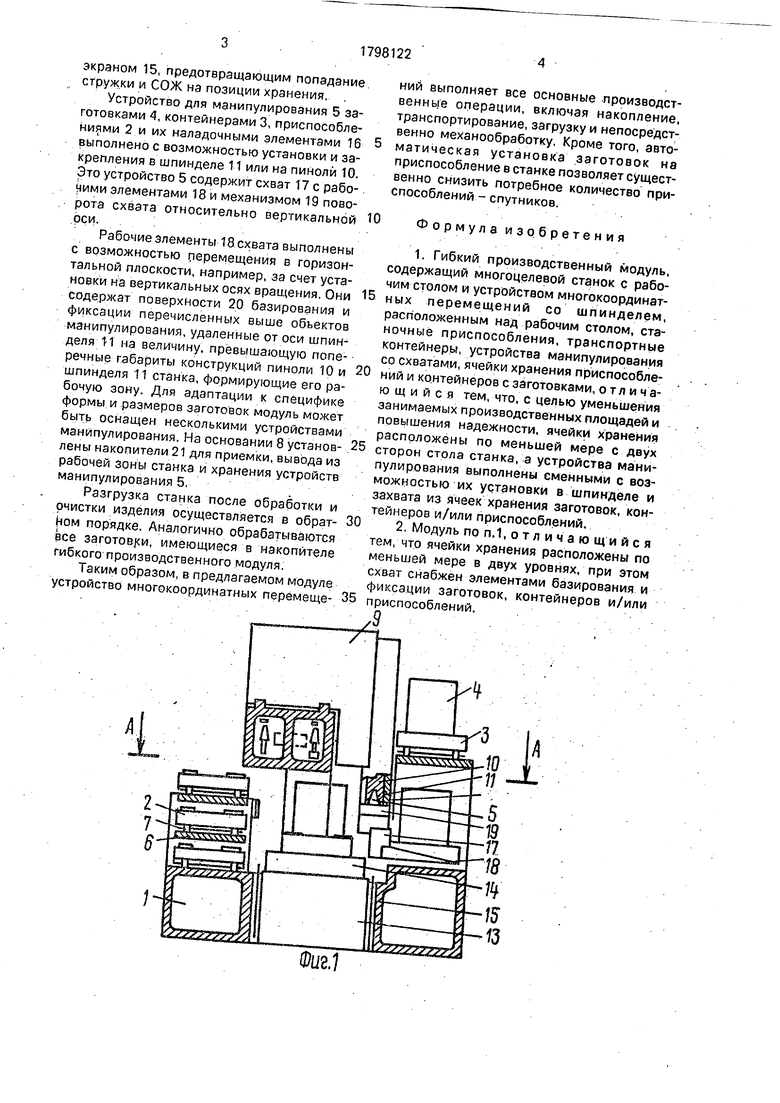
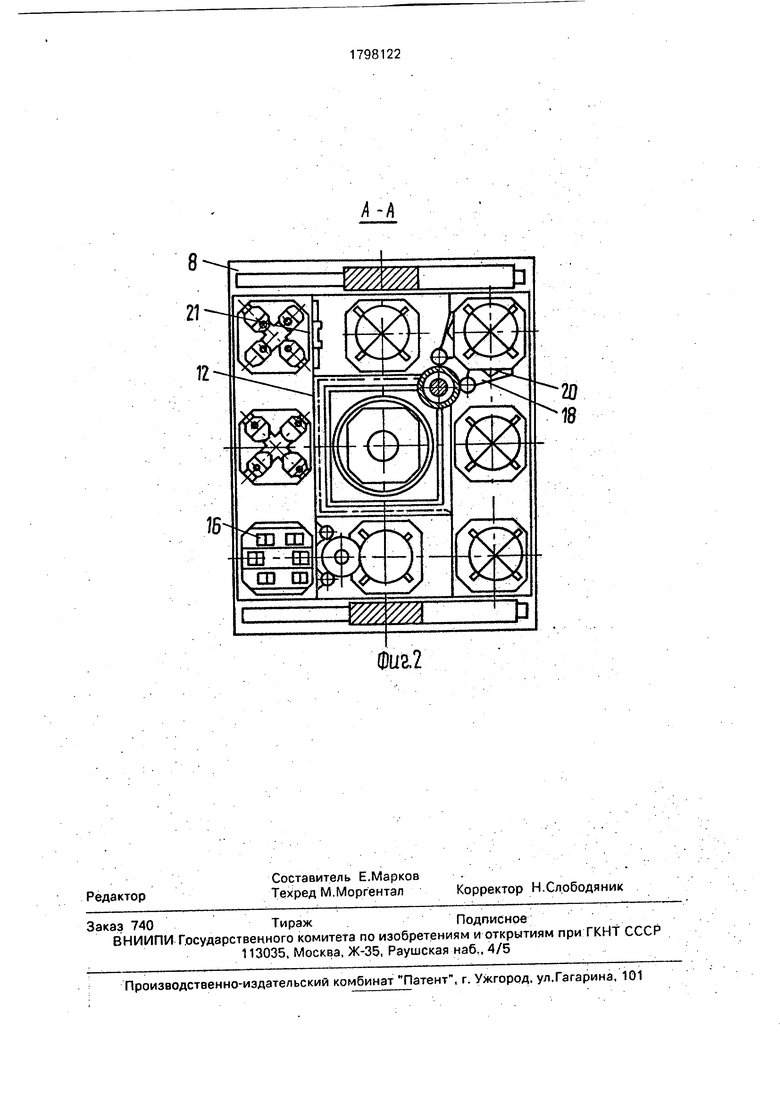
. Целью изобретения является уменьшение занимаемых производственных площадей и повышение надежности путем использования многокоординатного общего привода для перемещения заготовок контейнеров и/или приспособлений и их наладочных элементов между ячейками хранения и рабочим столом.станка.. ; На фиг.1 изображен поперечный разрез гибкого производственного модуля; на фиг.2 - сечение А-Д на фиг.1.
Гибкий производственный модуль содержит многоцелевой станок 1, станочные
.приспособления 2,транспортные контейнеры 3 с заготовками 4, устройства манипулирования 5, ячейки 6 хранения
приспособлений и контейнеров в виде полок с базирующими элементами 7. На основании 8 станка установлено устройство 9 многокоординатного программно-управляемого перемещения пиноли 10 со шпинделем 11 под обрабатывающий инструмент.
Область всех возможных положений шпинделя и пиноли, реализуемых устройством 9 многокоординатных перемещений, образует рабочую зону 12 станка. Ячейки 6 хранения расположены стационарно вне рабочей зоны 12 станка и непосредственно примыкают к ее границе. Для повышения объёма накопления они располагаются по меньшей мере с двух, а в данном примере с четырех сторон от рабочей зоны станка в одном или нескольких уровнях.
В центре станка на механизме 13 переориентации установлен рабочий стол 14 под приспособления с обрабатываемой заготовкой. Стол оснащен подъемным защитным
00
ю ю
экраном 15, предотвращающим попадание стружки и СОЖ на позиции хранения, .
Устройство для манипулирования 5 заготовками 4, контейнерами 3, приспособлениями 2 и их наладочными элементами 16 выполнено с возможностью установки и закрепления в шпинделе 11 или на пинолй 10. Это устройство 5 содержит охват 17 с рабо- йими элементами 18 и механизмом 19 поворота схвата относительно вертикальной .оси.:
Рабочие элементы 18 схвата выполнены с возможностью перемещения в горизонтальной плоскости, например, за счет установки на вертикальных осях вращения. Они содержат поверхности 20 базирования и фиксации перечисленных выше обьектов манипулирования, удаленные от оси шпинделя Т1 на величину, превышающую поперечные габариты конструкций пинолй 10 и шпинделя 11 станка, формирующие его рабочую зону. Для адаптации к специфике формы и размеров заготовок модуль может быть оснащен несколькими устройствами манипулирования. На основании 8 установлены накопители 21 для приемки, вывода из рабочей зоны станка и хранения устройств манипулирования 5,
Разгрузка станка после обработки и очистки изделия осуществляется в обрат- йом порядке. Аналогично обрабатываются все заготов/си, имеющиеся в накопителе гибкого производственного модуля.
Таким образом, в предлагаемом модуле устройство многокоординатных перёмещей
Ю
15
20
25
30
35
ний выполняет все основные производственные операции, включая накопление, транспортирование, загрузку и непосредственно механообработку, Кроме того, автоматическая установка заготовок на приспособление в станке позволяет существенно снизить потребное количество приспособлений .- спутников,
Ф о р м у л а и з о б р е те н и я
1. Гибкий производственный модуль, содержащий многоцелевой станок с рабочим столом и устройством многокоординатных перемещений со шпинделем, расположенным над рабочим столом, станочные приспособления, транспортные контейнеры, устройства манипулирования со схватами, ячейки хранения приспособлений и контейнеров с заготовками, о т л и чающийся тем, что, с целью уменьшения занимаемых производственных площадей и повышения надежности, ячейки хранения расположены по меньшей мере с двух сторон стола станка, а устройства манипулирования выполнены сменными с возможностью их установки в шпинделе и захвата из ячеек хранения заготовок, контейнеров и/или приспособлений.
2. Модуль по п.1, отл ича ю щи и с я тем, что ячейки хранения расположены по меньшей мере в двух уровнях, при этом схват снабжен элементами базирования и фиксации заготовок, контейнеров и/или приспособлений..
9
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Гибкая производственная система | 1988 |
|
SU1780992A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Способ управления процессом поточного производства | 1978 |
|
SU774918A1 |
| Сменное захватное устройство | 1988 |
|
SU1618649A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Стол-спутник | 1988 |
|
SU1662809A1 |
| Гибкий производственный модуль | 1987 |
|
SU1419852A1 |
Изобретение относится к машинострое- ||ию, приборостроению и может быть использовано в отраслях народного хозяйства для автоматизации, мелкосерийного и единичного производства механообработки. Целью изобретения является уменьшение занимаемых производственных площадей и повышение надежности путем использования многокоординатного общего привода для перемещения заготовок, приспособлений, контейнеров между ячейками хранения и рабочим столом станка. В модуле стационарные ячейки хранения непосредственно примыкают к границе рабочей зоны станка и располагаются по меньшей мере с двух сторон от нее в один или несколько уровней. Сменное устройство манипулирования заготовками, контейнерами,приспособлениями и их наладочными элементами устанавливается в шпиндель станка, который за счет многокоординатных перемещения переносит последние от ячеек хранения на рабочий стол станка, 1 з.п. ф-лы, 2 ил.
| Проспект фирмы Pietrocarnaghl Гибкий производственный модуль | |||
| Италия, 1983, С | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - -: . | |||
