Изобретение относится к .области мэ; 1линостроения, а именно к захватам манипуляторов.
Известен захват автоматического манипулятора, содержащий штангу, распо; ложенную в вертикальной колонне, ползун, систему рычагов, захватные лапы и узел ориентации с захолными элементами 1.
Нелостатком известного захвата является необходимость малой зоны позициони рования заготовки при загрузке, что снижает технологические возможности захвата.
- Цель изобретение расширение технологических возможностей захвата за счет расширения зоны позиционирования заготовки на позиций загрузки.
Указанная цель достигается тем, чтд узел ориентации выполнен в виде шарнир ного параллелограмма;, состоящего из верхней и ни/кней плит и соединительных рычагов, концы которых выступают над верхней плитой, а последняя установлена на колонне с возможностью поворота в горизонтальной плоскости, при этом колонна снабжена ловителями,-имеющими цилиндрические и конические рабочие поверхности, а .на нижней плите выполнены заходные элементы в виде ..скоб..
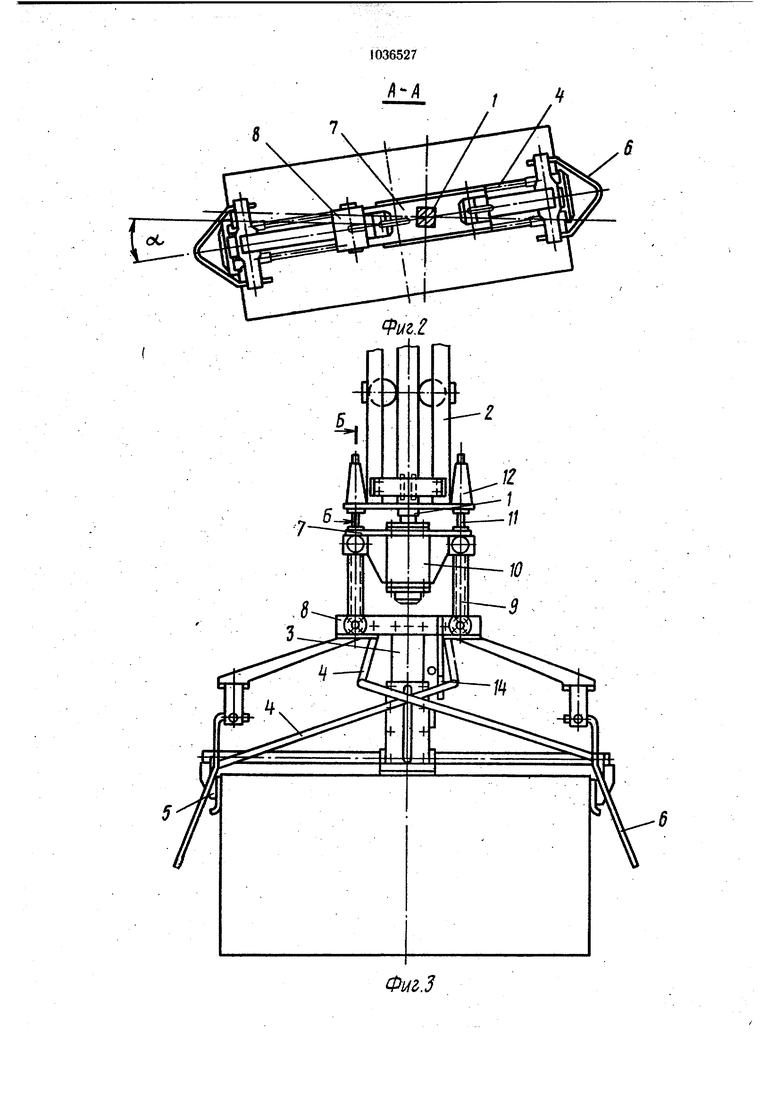
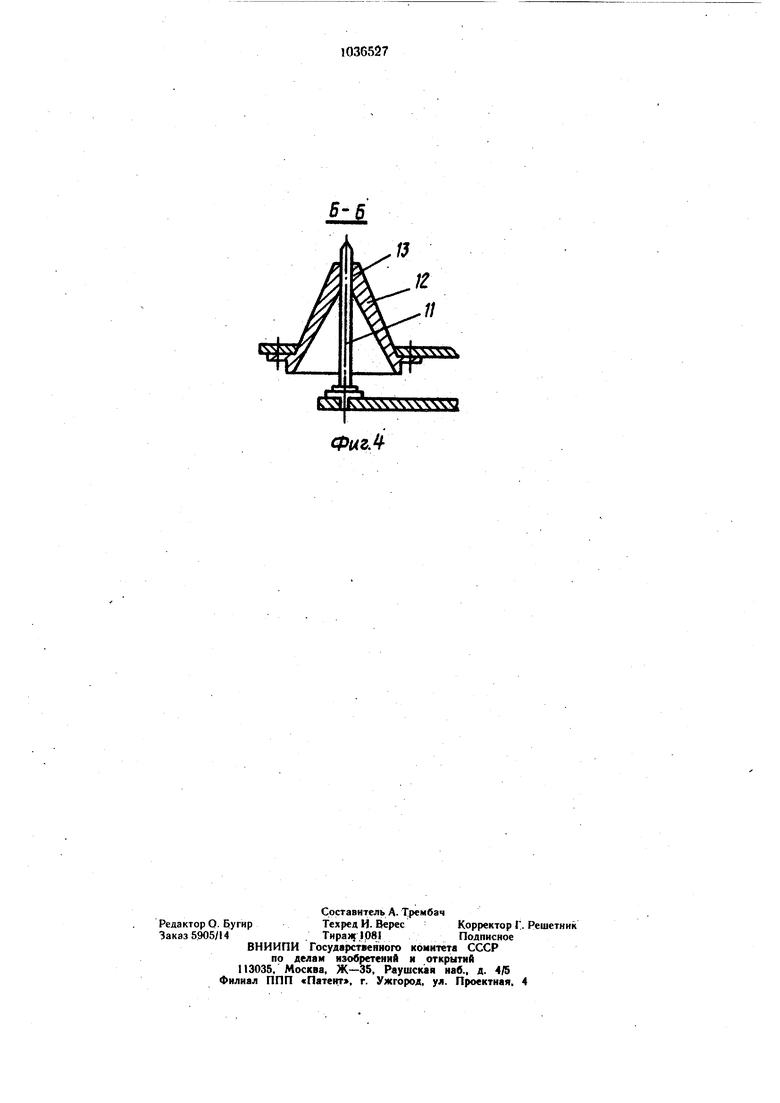
На фиг. I показан захват манипулятора, вид спереди; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - захват манипулятора, вид спереди, положение транспортирования с захваченным объектом; на фиг. 4 - разрез Б-Б на фиг. 3.
. Захват автоматического манипулятора содержит штангу 1, расположенную в вертикальной колонне 2, ползун 3, систему ры Чагов 4, захватные лапы 5 и узел ориентации с двумя заходными элементами 6. Узел ориентации выполнен в виде верхней 7 и нижней 8 плит, щарнирно связанных двумя рычагами 9, образующих совместно с плитами 7 и 8 параллелограмм. Плита 7 соединена с колонной 2 через подщипниковую .опору 10 с возможностью поворота в горизонтальной плоскости, к плите 8 прикреплены заходные элементы 6 (скобы), имеющие треугольную форму с вершиной, направленной вниз. Верхние концы рычагов 9 выступают над плитой 7, образуя штыри 11, для которых на нижней части колонны 2 предусмотрены ловители 12 в виде пустотелых усеченных конусов, расположенных основанием вниз, причем верхняя часть конуса переходит в цилиндрическую часть 13. Для управления работой захвата имеется конечный выключатель 14.
Захват работает следующим образом.
В исходном положении .штангаI с захватом и узлом ориентации находятся в верхнем положении, штыри 11 - в цилиндрических частях 13 ловителей 12. Лапы 5 захвата максимально разведены. Цикл работы захвата состоит из четерех тактов. Первый, такт - ориентирование захвата относительно захватываемого объекти. Штанга 1 с захватом и узлом ориентирования опускаются в нижнее положение, штыри II выходят из ловителей 12. Поскольку расстояние между нижними концами за ходных элементов 6 больше длины захватываемого предмета, а сами заходные элементы 6 имеют свободу в горизонтальной плоскости, при угловом и линейном смещениях захватываемого предмета относительг но колонны 2 заходные элементы 6 при опускании скользят по предмету. Благодаря этому происходит смещение нижней плиты 8 на шарнирных рычагах 9, а также разворот ее в подшипниковой cjnope 10 на угол Л7 после чего захват ориентируется относительно объекта.
Второй такт - закрепление детали в захвате ориентация и фиксация объекта в транспортном положении начинаются с подачи сигнала конечным выключателем 14 на подъем щтанги 1 с захватом. При этом пдлзун 3 перемещается вверх, лапы 5 за.жимают боковые стенки объекта. При дальнейшем подъеме захвата вверх штыри 11 входят вконусы ловителей 12 и затем в цилиндрические части 13. Таким образом
Q захватываемый объект в транспортном положении ориентируют и фиксируют по оси колонны 2 манипулятора. При этом исправляются линейные и угловые смещения объекта по отнощению к оси манипулятора. Третий такт - освобождение объекта
начинается опусканием захвата вниз. Сначала штыри 11 выходят из ловителей 12. После упора в платформу конвейера ползун 3 перемещают вниз, разжимая лапы 5 и освобождая захватываемый объект.
Четвертый такт - возврат захвата в
исходное транспортное положение производят по команде от конечного выключателя 14 на подъем щтанги 1 с захватом.При этом в крайнем верхнем положении штыри 11 вновь входят в цилиндрические
С части 13, фиксируя исходное положение захвата. При этом лапы 5 максимально разведены. Далее цикл работы повторяется.
Таким образом, работа предлагаемого захвата манипулятора расширяет диапазон позиционирования при использовании в
0 системе автоматических конвейерных линий, обеспечивает транспортирование объекта в ориентированием и фиксированном положении по оси колонны манипулятора, что повышает надежность манипулятора, исключает присутствие оператора.
.3
ii
XX11 «VSXVWWX
ФигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| МАНИПУЛЯТОР ДЛЯ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2113343C1 |
| Стенд для сборки трубных пучков секций аппаратов воздушного охлаждения | 1984 |
|
SU1234150A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Стан для раскатки лезвий стрельчатых лап культиватора | 1981 |
|
SU1084101A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Универсальная корабельная пусковая установка вертикального пуска | 2021 |
|
RU2767097C1 |
| Линия пайки погружением | 1985 |
|
SU1263462A1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
ЗАХВАТ АВТОМАТИЧЕСКОГО МАНИПУЛЯТОРА, содержащий шгангу, расположенную в вертикальной колонне, ползун, систему рычагов, захватные лапы и узел орнентации с заходными элементами, отличающийся тем, что, с целью рас/il. ширения технологических возможностей за счет расширения зоны позиционирования, узел ориентации выполнен в виде шарнирного .параллелограмма, состоящего из верхней и нижней плит и соединительных рычагов, концы которых выступают над верхней плитой, а последняя установлена на колонне с возможностью поворота в горизонтальной плоскости, при этом колонна снабжена ловителями, имеющими цилиндрические и конические рабочие поверхности, а на нижней плите выполнены заходные элементы в виде скоб. S (Л ел О5 СП to |
| I | |||
| Захват манипулятора | 1978 |
|
SU751622A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
