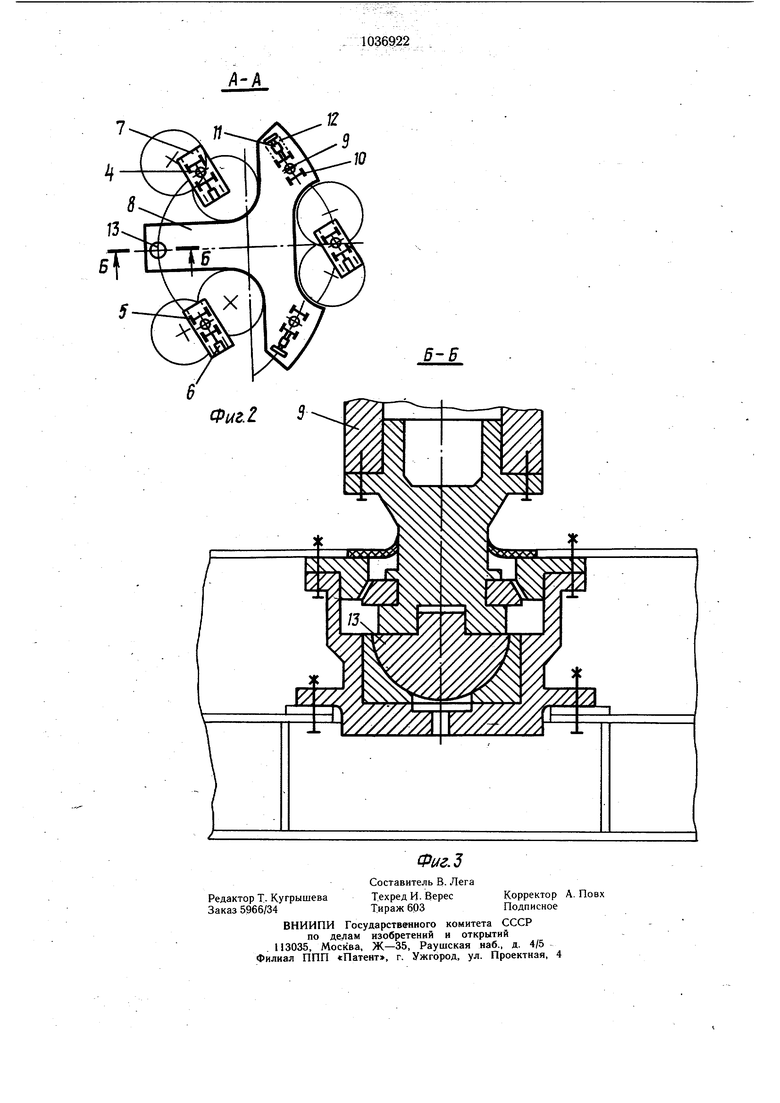
Изобретение относится к горной промышленности и может быть использовано в ходовых механизмах горных машин, служаших для разработки месторождений полезных ископаемых открытым способом. Известна машина для транспортирования горной массы при открытой добыче полезных ископаемых, состоящая из отвальной и приемной консолей с транспортерами, рамы с механизмом хода и опорного устройства 1 . Недостатком машины является ее малая маневренность, вследствие чего потери времени на маневры вызывают простой машин, в комплексе с которыми она работает. Наиболее близким техническим решением к предлагаемому является ходовой механизм машины для транспортирования горной массы, включаюш,ий раму, шагаюшие опоры и опоры поворота, связанные с рамой через цапфы, при этом шагаюшие опоры выполнены в виде центральных и боковых лыж 2. Недостатком устройства является его ограниченная маневренность. Целью изобретения является повышение маневренности ходового механизма. Указанная цель достигается тем, что ходовой механизм, включающий раму, установленную на опорах с лыжами, снабжен базой и сферической опорой, установленной на базе, при этом- база выполнена с направляюшими и установленными в них балансирными тележками, соединенными с рамой посредством гидродомкратов, при этом рама установлена на сферической опоре с возможностью поворота посредством привода, установленного в направляющих и соединенных с балансирными тележками, а лыжи выполнены поворотными. На фиг. 1 изображена машина, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. Ходовой механизм машины для транспортирования горной массы, состоящей из приемной 1 и разгрузочной 2 консолей, включает раму 3, опирающуюся тремя опорами 4 через балансирные тележки 5 на выдвигаемые приводом 6 поворотные лыжи 7. Кроме того, рама 3 связана с базой 8 тремя гидродомкратами 9, два из которых опираются на базу через -балансирные тележки 10, перемещаемые с помощью привода 11 па направляющим 12 базы Д а третий гидродомкрат опирается на базу через сферическую опору 13, совмещенную с осью вращения машины. Ходовой механизм работает следующим образом. При необходимости перемещения приемной 1 и разгрузочной 2 консолей лыжи 7 приподнимаются над землей. В этом положении производится поворот рамы 3 на базе вокруг опоры 13 с помощью привода 11, например гидроцилиндров, перемещающих тележки 10 по направляющим 12 базы 8. В случае, если необходимо повернуть машину на угол больший, чем имеется возможность, заложенная в конструкции базы с одного ее положения, то производится перешагивание, т. е. после перемешения тележек 10 по направляющим 12 базы 8 до упора последняя гидродомкратами 9 поднимается до тех пор, пока машина лыжами 7 не упрется в почву, а между базой и почвой не образуется зазор. В таком положенииЧприводом 11 база 8 своими направляющими 12 перемещается по опорным балансирным тележкам 10 в крайнее исходное положение, после чего домкратами 9 база 8 опускается на почву, а опорные лыжи 7 приподнимаются над землей, и цикл повторяется. В случае, если необходимо произвести перемещение машины прямолинейно, лыжи 7, находясь в поднятом над землей положении, синхронно поворачиваются в заданном направлении, после чего база 8 поднима- ется домкратами 9 до тех пор, пока машина лыжами 7 не упрется в почву, а между базой и землей образуется зазор. В таком положении балансирные тележки 5 приводом б по направляющим лыжами 7 перемещаю- . тся в заданном направлении. В случае, если заданный путь перемещения превышает ход тележки 5 в направляюших лыжах 7, производится перешагивание. Перешагивание осуществляется следующим образом. В крайнем положении тележек 5 на лыжах 7 домкратами 9 база 8 опускается на почву до тех пор, пока между лыжами 7 и почвой не образуется зазор. Затем приводом 6 лыжи по тележкам 5 перемещаются в исходное положение, после чего домкратами 9 машина опускается на лыжи 7, а база 8 поднимается до тех пор, пока между базой и почвой не образуется зазор. При необходимости дальнейщего перемещения цикл повторяется. Предложенное устройство позволяет повысить маневренность машины для транспортирования горной массы, увеличить ее производительность.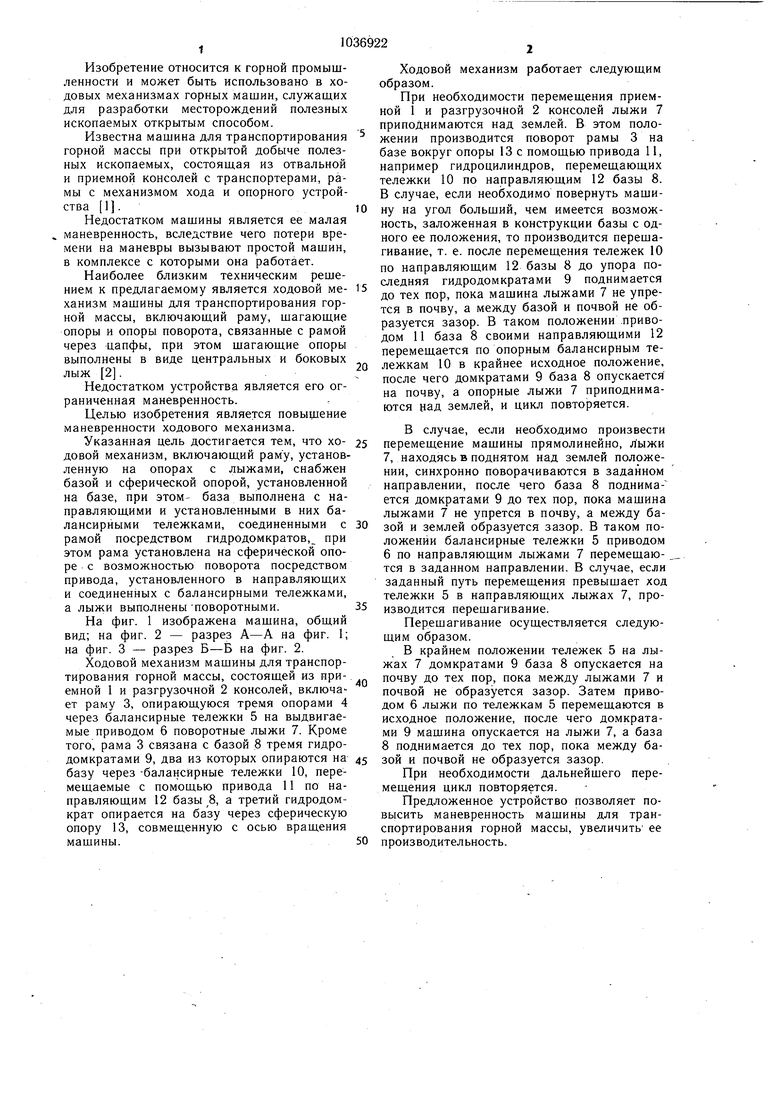
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| Способ монтажа шагающей машины | 1983 |
|
SU1216147A1 |
| Отвалообразователь | 1978 |
|
SU754072A1 |
| Шагающее ходовое оборудование | 1973 |
|
SU702129A1 |
| Шагающий ходовой механизм | 1970 |
|
SU610998A1 |
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| Ходовой механизм тяжелых горно-транспортных машин | 1987 |
|
SU1461837A1 |
| Шагающее ходовое оборудование | 1988 |
|
SU1546571A1 |
| Шагающее ходовое оборудование | 1983 |
|
SU1081300A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
ХОДОВОЙ МЕХАНИЗМ МАШИНЫ ДЛЯ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ, включающий раму, установленную на опорах с лыжами, отличающийся тем, что, с целью повышения маневренности, он снабжен базой и сферической опорой, установленной на базе, при этом база выполнена с направляющими и имеет установленные в них балансирные тележки, соединенные с рамой посредством.гидродомкратов, при этом рама установлена на сферической опоре с возможностью поворота посредством привода, установленного в направляющих и соединенного с балансирными тележками, а лыжи выполнены поворотными. со со to ю
| ОТВАЛООБРАЗОВАТЕЛЬ | 0 |
|
SU284721A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ХОДОВОЙ МЕХАНИЗМ | 0 |
|
SU276862A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
