(54) ПРИВОД ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ ХОБОТА КОВОЧНОГО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Устройство вертикальной амортизации хобота ковочного манипулятора | 1987 |
|
SU1516216A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Гидропривод пресса | 1981 |
|
SU1043034A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциям ковочных манипуляторов.
Известен привод вертикального перемещения хобота ковочного манипулятора, содержащий соединенные магистраля.ми цилиндр вертикального перемещения хобота, цилиндр возврата хобота по высоте, гидрораспределитель, источник рабочей среды, аккумулятор и. сливную магистраль 1.
Во время ковки при перемещении хобота с поковкой вниз энергия, которая была затрачена на его подъе.м, превращается в тепловую и не может быть использована для возврата „хобота по высоте, что увеличивает экономические затраты на работу привода.
Цель изобретения - снижение энергетических затрат при работе привода манипулятора.
Цель достигается тем, что привод вертикального перемещения хобота ковочного манипулятора, содержащий соединенные магистралями цилиндр вертикального перемещения хобота, цилиндр возврата хобота по высоте, гидрораспределитель, источник рабочей среды, аккумулятор и сливную магистраль, снабжен трехпозиционным гидрораспределителем, связанны.м магистралью с акку.муляторо.м, а также двухпозиционным гидрораспределителем, соединенным со сливной .магистралью, при этом цилиндр возврата хобота по высоте выполнен трехполостны.м, порщневая его полость соединена с цилиндром вертикального перемещения, щтоковая - с аккумулятором и указанным трехпозиционным гидрораспределителем, а плунжерная - посредством указанного двухпозиционного гидрораспределителя с источником рабочей среды.
С целью обеспечения возможности автоматической настройки давления в аккумуляторе в зависимости от веса обрабатываемой поковки, привод может быть снабжен порщневым цилиндром со штоком, порщневая и щтоковая полости которого связаны соответственно с порщневой и щтоковой полостями цилиндра возврата хобота по высоте, а таже двумя контактными, установленными с возможностью взаимодействия со щтоко.м порщневого цилиндра, при этом площади порщневых и щтоковых полостей
цилиндра возврата хобота по высоте и поршневого цилиндра пропорциональны.
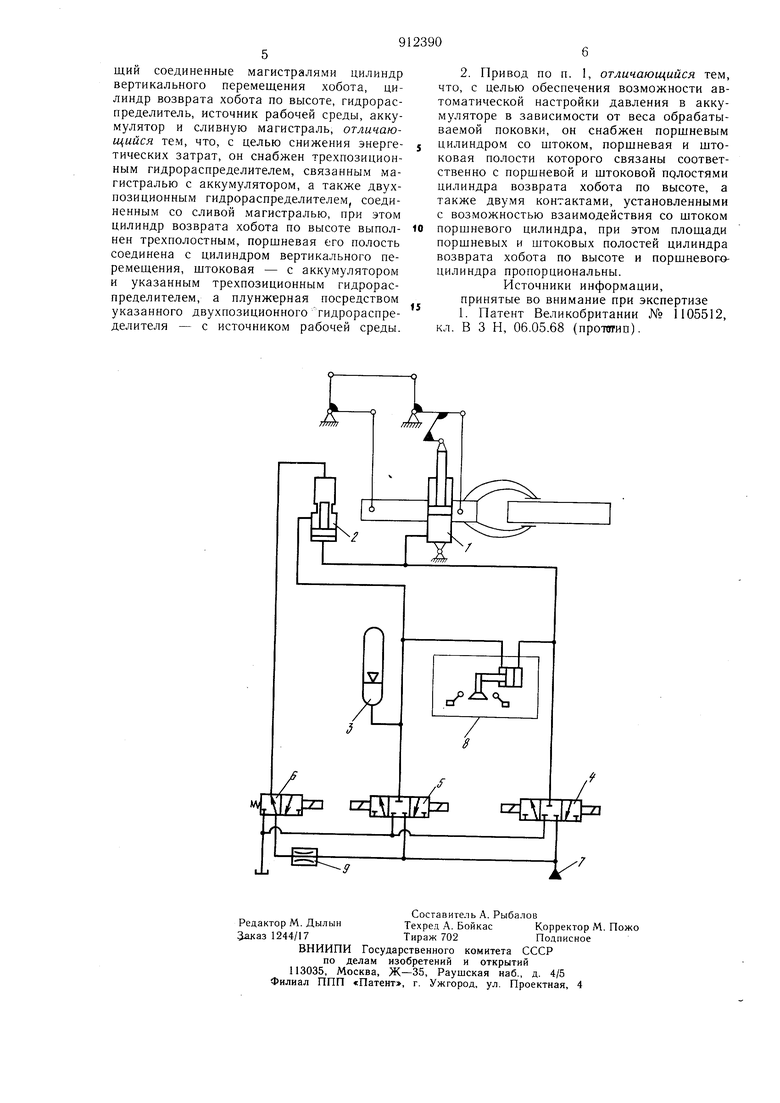
На чертеже изображена схема привода вертикального перемещения хобота ковочного манипулятора.
Привод вертикального перемещения хобота ковочного манипулятора содержит связанный с хоботом манипулятора цилиндр 1 вертикального перемещения, цилиндр 2 возврата хобота по высоте, имеющий норщневую, штоковую и плунжерную полости, аккумулятор 3, гидрораспределители 4, 5 и 6, источник рабочей среды 7, устройство 8, контролирующее настройку давления в аккумуляторе, дроссель 9 и магистрали. Штоковая полость цилиндра 1 вертикального перемещения разгружена, а поршневая соединена с порщиевой полостью цилиндра 2 возврата хобота по высоте. Плунжерная полость цилиндра возврата хобота по высоте соединена с гидрораспределителем 6, а штоковая - с аккумулятором 3. Поршневая и штоковая полости устройства 8 соединепы соответственно с поршневой и штоковой полостью цилиндра 2 возврата хобота по высоте, а их площади нр0 юрциональны.
Устройство 8 включается только во время настройки давления в акку.муляторе 3. В отключенном состоянии оно независимо от состояния контактов не подает команду на подъем или сброс давления в аккумуляторе 3.
При выключенных электро.магнитах гидрораснределители 4 и 5 запирают магистрали, связывающие их с поршневой и штоковой полостями цилиндра 2 возврата хобота по высоте, а гидрораспределитель 6 соединяет плунжерную полость цилиндра возврата хобота по высоте с источНИКОМ рабочей среды 7. Поршень цилиндра возврата хобота FIO высоте занимает крайнее нижнее положение, а хобот с поковкой удерживается от вертикального перемещения цилиндром 1 вертикального перемещения. При включении левого электромагнита гидрораснределителя 4 поршневая полость цилиндра 1 вертикального перемещения соединяется с источником рабочей среды 7 и происходит подъем хобота с поковкой. При включении правого электромагнита гидрораспределителя 4 норшневая полость цилиндра 1 вертикального перемещения соединяется со сливом и хобот с поковкой опускается. Во время настройки давления в аккумуляторе 3 по весу поковки включено устройство 8, которое подает ко.манду на нодъе.м давления в аккумуляторе 3, если замкнут его левый контакт, или на сброс давления, если замкнут правый контакт. Во время подъема давления включен левый электромагнит гидрораспределителя 5, и рабочая жидкость от источника рабочей среды 7 поступает в аккумулятор 3. При сбросе давления включен правый электромагнит гидрораспределителя 5, и рабочая жидкость из аккумулятора 3 поступает на слив. При размыкании обоих контактов устройство 8 отключается. Одновременно отключается электромагнит гидрораспределителя 5. Настройка давления оканчивается.
По команде на смыкание бойков пресса включается электромагнит гидрораспределителя 6 и плунжерная полость цилиндра 2 возврата хобота по высоте соединяется со сливом. Усилие цилиндра вертикального перемещения становится равным весу хобота с ноковкой, так как после настройки давления суммарное усилие от действия на поршень цилиндра возврата хобота по высоте давления в аккумуляторе 3 и давления, создаваемого весом хобота и поковки в цилиндре 1 вертикального перемешения, становится равным нулю. При воздействии верхнего бойка пресса на поковку хобот с поковкой опускается. Жидкость из цилиндра 1 вертикального перемещения поступает в норшневую полость цилиндра 2 возврата хобота но высоте. Поршень цилиндра возврата хобота по высоте, перемещаясь вверх, вытесняет жидкость из штоковой полости в аккумулятор 3, а из плунжерной - на слив. После соприкосновения поковки с нижним бойком пресса скорость перемещения хобота с поковкой вниз становится равной скорости деформации поковки нижним бойком. После отрыва верхнего бойка пресса от поковки отключается электромагнит гидрораспределителя 6 и плунжерная полость цилиндра возврата хобота по высоте соединяется с источником рабочей среды 7. Поршень цилиндра возврата хобота по высоте, перемещаясь в крайнее нижнее положение, вытесняет в цилиндр 1 вертикального перемещения жидкость, поступивн ую из этого цилиндра во .время смыкания бойков пресса. Хобот с поковкой возвращается в положение, которое он занимал до начала смыкания бойков пресса. Скорость возврата хобота но высоте ограничивается дросселем 9. Во время ковки энергия, затраченная на подъем хобота с поковкой, преобразуется при неремещении хобота с поковкой вниз в энергию сжатой жидкости, накапливаемую аккумулятором 3, и используется для возврата хобота но высоте. Кроме того, усилие цилиндра 1 вертикального перемещения не передается на верхний боек пресса, что позволяет избежать изгиба поковки.
Использование предложенного изобретения позволяет снизить энергетические затраты при работе привода вертикального перемещения хобота ковочного манипулятора.
Формула изобретения
