( ПРИВОД 1РОДОЛЬНОГО ПЕРЕМЕЩЕНИЯ ТЕЛЕЖКИ И ХОБОТА КОВОЧНОГО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1971 |
|
SU682317A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Привод вертикального перемещения хобота ковочного манипулятора | 1980 |
|
SU912390A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
| Устройство вертикальной амортизации хобота ковочного манипулятора | 1987 |
|
SU1516216A1 |
| Способ управления ковочным манипулятором | 1978 |
|
SU724267A1 |
1
Изобретение относится к вспомогэ тельному оборудованию кузнечно-прессовых цехов машиностроительных предприятий, а именно к ковочным манипу-. ляторам.
Известен привод продольного перемещения тележки и хобота ковочного манипулятора, содержащий гидромотор и силовой цилиндр осевой подачи, соединенные магистралями .с насосом и дополнительным источником рабочей среды под давлением, а также устройство управления гидромотором и силовым цилиндром оЬевой подачи, выполненные в виде гидрораспределителей 1 .
В известном приводе при перемещении во время цикла ковки тележки и хобота манипулятора на расстоянии, равном шагу ковки, срабатывают все четыре гидрораспределителя, входящие в состав привода. Это снижает надежность и производительность работы
привода, особенно при большом числе циклов ковки в минуту.
Цель изобретения - повышение надежности и производительности, работы привода.
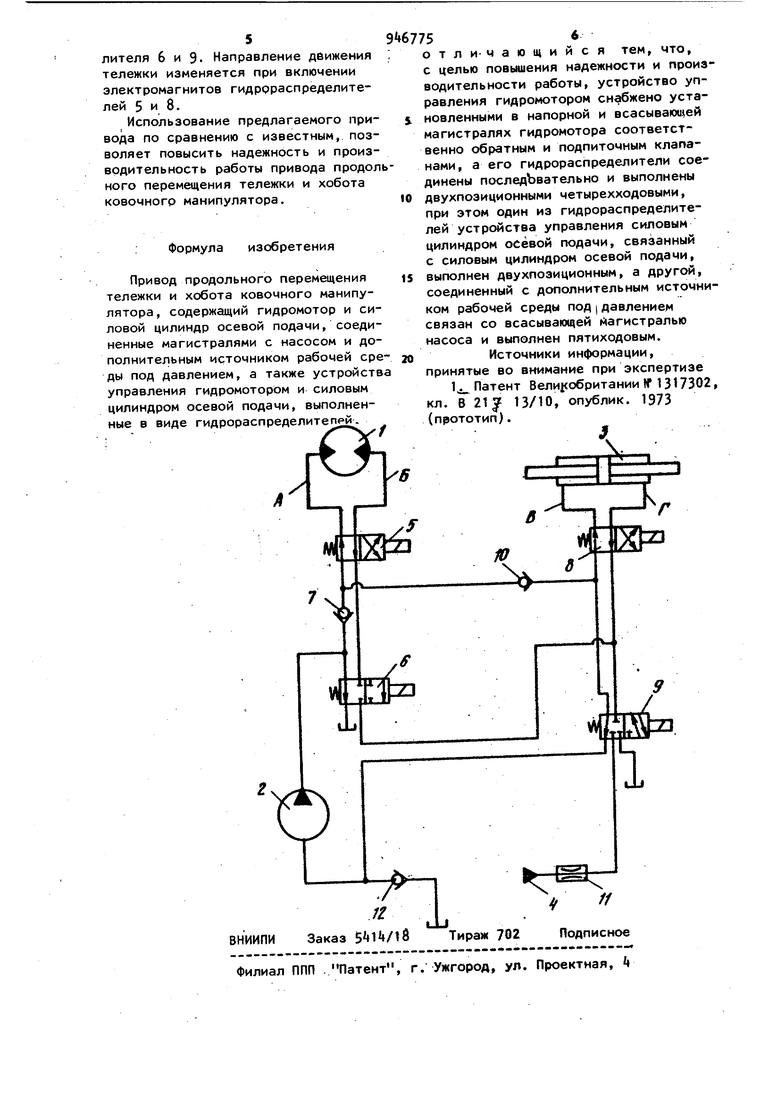
Указанная цель достигается тем, что в приводе продольного перемещения тележки и хобота ковочного манипулятора , содержащем гидромотор и
10 силовой цилиндр,осевой подачи, соединенные магистралями с насосом и дополнительным источником рабочей среды под давлением, а также устройства управления гидромотором и сило15вым цилиндром осевой подачи, выполненные в виде гидрораспределителей, устройство управления гидромотором снабжено установленными в напорной и всасывающей магистралях гидромо20тора соответственно обратным и подпитомным клапанами, а его гидрорас(Тределители соединены последовательно и выполнены двухпозиционными четырехходовыми, при этом один из гидрораспределителей устройства управления силовым цилиндром осевой подачи, связанный с силовым цилиндром осевой подачи, выполнен двухпозиционным, а, другой, -соединенный с дополнительным источником рабочей среды под давлением, связан со всасывающей магистралью насоса и выполнен пятиходовым, На чертеже изображена схема привода продольного перемещения тележки и хобота ковочного манипулятора. Привод продольного перемещения тележки и хобота ковочного манипулятора содержит гидромотор 1, соединенный с механизмом перемещения тележки манипулятора и питающийся от насоса 2 через устройство управления гидромотором, и цилиндр 3 осевой подачи, связанный с хоботом манипулятора и питающийся от дополнительного источника давления через устройство управления цилиндром осевой подачи, Устройство управления гидромоторо состоит из двух последовательно соединенных двухпозиционных четырехходо вых гидрораспределителей 5 и 6 и установленного на напорной магистрали обратного клапана 7. Гидрораспределитель 5 связан с гйдромотором 1, а гидрораспределитель 6 - со сливной магистралью и устройством управления цилиндром осевой подачи. Устройство управления цилиндром осевой подачи состоит из двух последовательно соединенных двухпозиционных гидрораспределителей: четырехходового 8 и пя тиходового 9, обратного клапана 10, соединенного с устройством управлени гидромотором и дросселя 11. Гидрорас пределитель 8 связан с цилиндром 3 осевой подачи, а гидрораспределитель 9 с дополнительным источником k давления, сливной магистралью и всасывающей магистралью насоса 2, на которой установлены подпитомный клапан 12. При включенных электромагнитах насос 2 разгружен через гидрораспределитель 6, а во всасывающую магистраль насоса поступает жидкость через клапан 12. Подводы гидромотора 1, по подвод Г цилиндра 3 осевой подачи заперты гидрораспределителями 6 и 9 Подвод В цилиндра 3 осевой подачи соединен со всасывающей магистралью насоса 2. Привод работает следующим образом. Тележка манипулятора начинает движение во время деформации поковки бойками пресса. Включается электромагнит гидрораспределителя 6. Жидкость от насоса 2 поступает в подвод А гидромотора. Из Иодвода 6 гидромотора 1, рабочая жидкость поступает в подвод Г цилиндра 3 осевой подачи, поршень которого, перемеща-. ясь выталкивает жидкость из подвода В во всасывающую магистраль насоса 2, Цилиндр 3 осевой подачи, площадь которого выбрана равной отношению расхода жидкости, проходящей через гидромотор, к скорости движения тележки, перемещает хобот со скоростью, равной скорости движения тележки в противоположном направлении. В этом случае хобот остается неподвижным относительно бойков пресса и изгиба поковки не происходит. После освобождения поковки бойками пресса включается электромагнит гидрораспределителя 9. Подвод В цилиндра 3 осевой подачи отсекается от всасывающей магистрали насоса 2 и соединяется с дополнительным источником давления, а подвод Г и подвод Б гидромотора 1 соединяются со сливной магистралью. Хобот с поковкой ускоренно перемещается в направлении движения тележки, а во всасывающую магистраль насоса поступает жидкость через клапан 12. Скорость движения хобота с поковкой ограничивается дросселем 11. Реактивная сила, возникающая при ускоренном перемещении хобота с поковкой и препятствующая движению тележки, компенсируется быстрым ростом усилия, перемещающего тележку, за счет соединения напорных магистралей устройств управления гидромотором и цилиндром 3 осевой подачи через клапан 10. Хобот с поковкой, переместившись на расстояние, равное шагу ковки, останавливается относительно бойков пресса при отключении электромагнита гидрораспределителя 9. Тележка манипулятора продолжает движение до тех пор, пока не пройдет расстояние, равное применению хобота с поковкой относительно бойков пресса, и останавливается при отключении электромагнита гидрораспределителя 6. Таким образом, во время цикла ковки срабатывают два гидрораспреде
