СА: СО 00 1чЭ
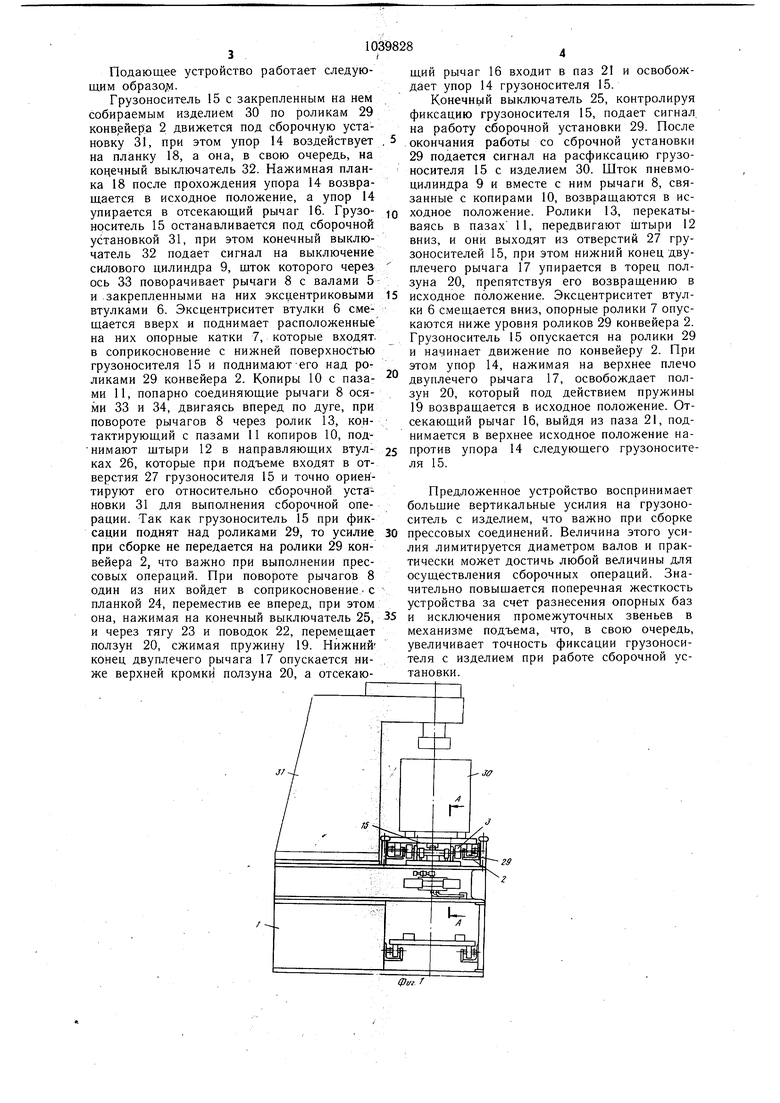
О) Изобретение относится к машиностроению, а именно к несинхронным сборочным линиям. Известно устройство для фиксации в несинхронной транспортной системе, включающее цепной тяговый орган, грузоносители, свободно установленные на нем ,1. Недостатком этого устройства является то, что при остановке грузоносителя для выполнения операций над собираемым изделием не происходит расцепления грузоносителя с цепным тяговым органом, что приводит к износу поверхности цепи и грузоносителя. Наиболее близким техническим решением к изобретению является устройство для фиксации грузоносителей, включающее механизм подъема с силовым цилиндром, механизм фиксации с приводом и фиксаторами, установленными с возможностью размещения в соответствующих отверстиях грузоносителей и отсекающий механизм с взаимодействующими с упорами грузоносителей отсекающими рычагами и с конечным выключателем системы связи с механизмом подъема 2. Недостатком указанного устройства является то, что с увеличением веса грузоносителя с собираемым изделием увеличивается и усилие, необходимое для подъема грузоносителя с изделием до расклинивания рычагов, что связано, с большими энергозатратами, кроме того, недостаточная поперечная жесткость устройства в зафиксированном положении при выполнении сборочных операции, особенно прессовых, снижает точность фиксации грузоносителя относительно сборной установки. Цель изобретения - снижение энергозатрат при фиксации грузоносителей с тяжеловесными грузами и расширение технологических возможностей. Указанная цель достигается тем, что в подающем устройстве, включающем механизм подъема с силовым цилиндром, меха „,----, низм фиксации с приводом и фиксаторами, установленными с возможностью размещения в соответствующих отверстиях грузоносителей, и отсекающий механизм с взаимодействующими с упорами грузоносителей отсекающими рычагами и с концевым выключателем системы связи с механизмом подъема, механизм подъема выполнен в виде двух валов с эксцентриками и поворотных рычагов, один конец каждого из которых закреплен на соответствующем валу, а другой - на силовом цилиндре, привод механизма фиксации выполнен в виде двух установленных с возможностью продольного перемещения копиров с пазами, каждый из которых связан с соответствующими поворотными рычагами, а каждый фиксатор выполнен в виде штыря с роликом на конце, установленном в пазу соответствующего копира с возможностью вертикального перемещения, при этом отсекающий механизм выполнен в виде двуплечего рычага и нажимной планки, установленных с возможностью взаимодействия с упорами грузоносителей, и подпружиненного ползуна; с пазом, причем двуплечий и отсекающий рычаги и нажимная планка установлены с возможностью размещения в пазу подпружиненного ползуна, а система связи с механизмом подъема выполнена в виде поводка, тяги и планки, установленной с возможностью взаимодействия с одним из поворотных рычагов и концевым выключателем На фиг. I изображено подающее устройство, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-1Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - разрез Д-Д на фиг. 3. Подающее устройство включает станину 1, на которой между ветвями, например, роликового приводного конвейера 2, смонтирован механизм подъема 3, выполненный в виде установленных на основании 4 двух валов 5 с закрепленными на концах эксцентриковыми втулками 6 с опорными катками 7. На валах 5 жестко закреплены поворотные рычаги 8, по два на каждом валу 5, свободные концы которых щарнирно соединены с силовым цилиндром 9. Привод механизма фиксации выполнен в виде двух установленных с возможностью продольного перемещения копиров 10 с пазами 11. КажДьш фиксатор выполнен в виде щтыря 12 с роликом 13 на конце, установленном в пазу И соответствующего копира 10 с возможностью вертикального перемещения. Отсекающий механизм имеет взаимодействующий с упорами 14 грузоносителей 15 отсекающий рычаг 16 и выполнен в виде двуплечего рычага 17 и нажимной планки 18, установленных с возможностью взаимодействия с упорами 14 грузоносителей 15 и подпружиненного пружиной 19 ползуна 20 с пазом 21, в котором расположены двуплечий 17 и отсекающий 16 рычаги и нажимная планка 18. Система связи с механизмом подъема выполнена в виде поводка 22, тяги 23 и планки24, установленной с возможностью взаимодействия с одним из поворотных рычагов 8 и конечным выключтелем 25. Каждый щтырь 12 установлен в направляющих втулках 26 с возможностью размещения в соответствующих отверстиях 27 грузоносителей 15. Подпружиненный ползун 20 установлен с вoзмoжнocт ю перемещения относительно корпуса 28. Грузоносители 15 установлены на ролики 29 конвейера 2 и служат для .базирования и закрепления собираемого изделия 30. На станине 1 смонтирована сборочная установка 31 например пресс. Нажимная планка 18- установлена с возможностью взаимодействия с конечным выключателем 32. Копиры 10 соединены с поворотными рычагами 8 посредством осей 33 и 34. Подающее устройство работает следующим образо;у1. Грузоноситель 15 с закрепленным на нем со ГТзяелие зГпГТо - 5 . ОП T-,f- г /- птлг/олд VQ :™гтi r;v7 r LC . НЯ планку 18 a она в свою очередь, на коцечныГвьключатёл; 32. Нажимная планка 18 после прохождения упора 14 возвращается в исходное положение, а упор 14 упирается в отсекающий рычаг 16. Грузе-ю нПтель 15 останавливается под сборочной установкой 31 при этом конечный выключатель 32 подает сигнал на выключение гилового цилиндра 9 щток которого через oS 33 поворачивает рычаги 8 с валами 5 и закрепленными на них эксцентриковыми втулками 6 Эксцентриситет втулки 6 смеш1ется вверх и поднимает расположенные TJi.-r,.Lh. Г- 4а ТКГр; ГГ„аГаликами /У конвейера . /v ЛИлаМп С7 rvunoi rivipu . - ми 11, попарно соединяющие рычаги 8 осями 33 и 34, двигаясь вперед по дуге, при повороте рычагов 8 через ролик 13, контактирующий с пазами 11 копиров 10, подтяктиоующии с пазами .i ui.npuo .., ..« нимаюТГьфи 12 в направляющих втулках 26 которые при подъеме входят в от™ГуГ оТнГиТеГо Тновки 31 для выполнения сборочной oneрации. Так как грузоноситель 15 при фиксации поднят над роликами 29, то усилие Sejrr ™ т 1 „Г„Гс-г . I Б1Г-аП: й г и через тягу 23 и поводок 22, перемещает ползун 20, сжимая пружину 19. Нижний конец двуплечего рычага 17 опускается ниже верхней кромки ползуна 20, а отсекающий рычаг 16 входит в паз 21 и освобождает упор 14 грузоносителя 15. Конечный выключатель 25, контролируя ФиксаГ W OHOCH™. ,5 „одае. „™a. °.s r: 29 подается сигнал на расфиксацию грузоносителя 15 с изделием 30. Шток пневмоцилиндра 9 и вместе с ним рычаги 8, связанные с копирами 1, возвращаются в и ходное положение. Ролики 13, перекатьЕ ваясь в пазах 11, передвигают штыри 12 вниз, и они выходят из отверстии 27 грузоносителей 15, при этом нижний конец двуплечего рычага 17 упирается в торец ползуна 20, препятствуя его возвращению в исходное положение. Эксцентриситет втулки 6 смещается вниз, опорные ролики 7 опускаются ниже уровня роликов 29 конвейера 2 еС Г Г Q, который под действием пружины 19 возвращается в исходное положение. Отсекающий рычаг 16, выйдя из паза 21, поднимается в верхнее исходное положение напротив упора 14 следующего грузоносителя 15. Предложенное устройство воспринимае большие вертикальные усилия «а грузоно ситель с изделием, то важно при сборке прессовых соединении. Величина этого уси ГеГ: srrrs и «г, :-::.s-, г механизме подъема, что, о о . работе сборо нои устеля с изделием при работе сборочной у тановки.
Аб 26 72 г 7ff 2J/ ,/ /,// . Р I// /
. ///у//х///////х /7.
Г- Г
//
/
JJ
re
7
Л7
ф1/г.
д-д
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный сборочный автомат | 1981 |
|
SU921760A1 |
| УСТРОЙСТВО ДЛЯ ОСТАНОВКИ КАРЕТКИ, ВЗАИМОДЕЙСТВУЮЩЕЙ С ТЯГОВОЙ ЦЕПЬЮ | 1998 |
|
RU2137691C1 |
| Устройство для фиксации грузоно-СиТЕля | 1979 |
|
SU852732A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для фиксации грузоносителей | 1984 |
|
SU1270073A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| Тележечный конвейер | 1980 |
|
SU981136A1 |
| Подающее устройство | 1985 |
|
SU1313773A1 |
| Поворотный делительный стол | 1983 |
|
SU1114522A1 |
| Устройство для фиксации грузоносителей | 1980 |
|
SU981137A1 |


ПОДАЮЩЕЕ УСТРОЙСТВО, включающее механизм подъема с силовым цилиндром, механизм фиксации с приводом и фиксаторами, установленными с возможностью размещения в соответствующих отверстиях грузоносителей, и отсекающий механизм с взаил одействующими с упорами грузоносителей отсекающими рычагами и с концевым выключателем системы связи с механизмом подъема, отличающееся тем, что, с целью снижения энергозатрат при фиксации грузоносителей с тяжеловесными грузами и расширения технологических возможностей, механиам. подъема выполнен в виде двух валов с эксцентриками и поворотных рычагов, один конец каждого из которых закреплен на соответствующем валу, а другой - на,силовом цилиндре, привод механизма фиксации выполнен в виде двух установленных с возможностью продольного перемещения копиров с пазами, каждый из которых связан с соответствующими поворотными рычагами, а каждый фиксатор выполнен в виде штыря с роликом на конце, установленном в пазу соответствую{цего копира с возможностью вертикального перемещения, при этом отсекающий механизм выполнен в виде двупле 1его рычага и нажимной планки, установленных с возможностью взаимодействия с упорами грузоносителей, и подпружиненного ползуна с S пазом, причем двуплечий и отсекающий рычаги и нажимная планка установлены (Л с возможностью размещения в пазу подпружиненного ползуна, а система связи с механизмом подъема выполнена в виде поводка тяги и планки, установленной с возможностью взаимодействия с одним из поворотных рычагов и концевым выключателем.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для диагностики каналов | 1975 |
|
SU566249A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для фиксации грузоносителя | 1978 |
|
SU724399A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
