Изобретение относится к мгиБиаострое- иию, а именно к подающим устройствам автоматических и автоматизированных сборочных линий.
Целью изобретения - новьш1ение производительности и снижение энергоемкости устройства.
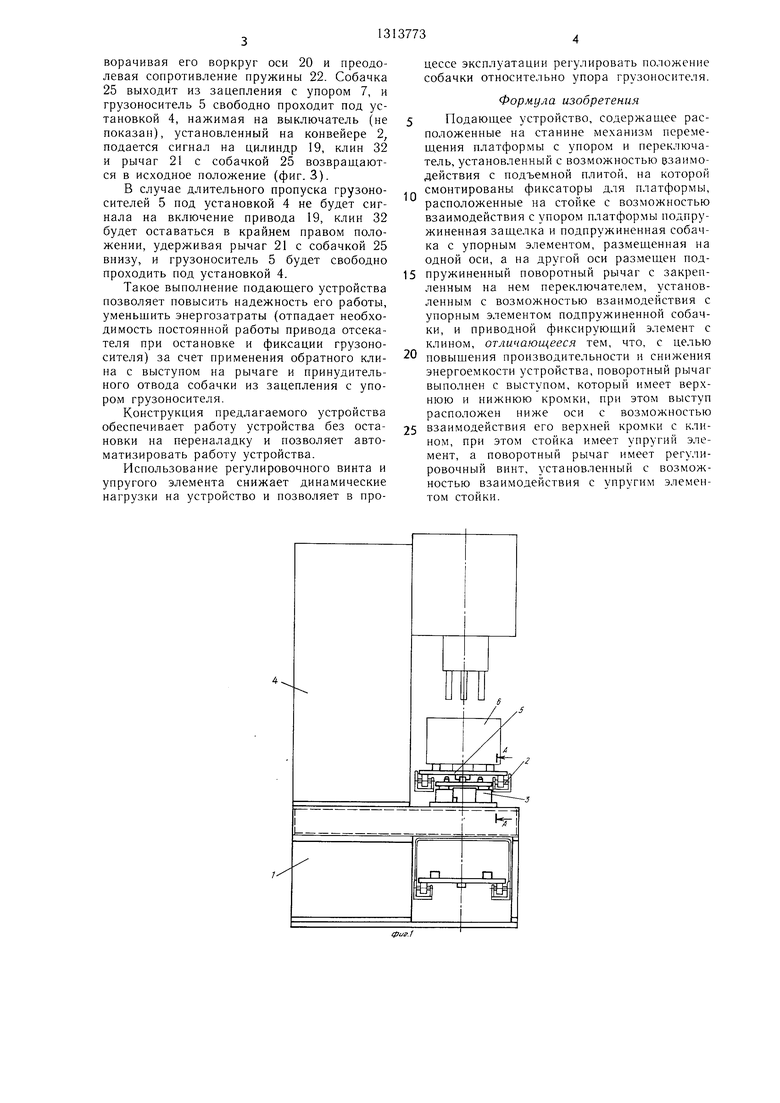
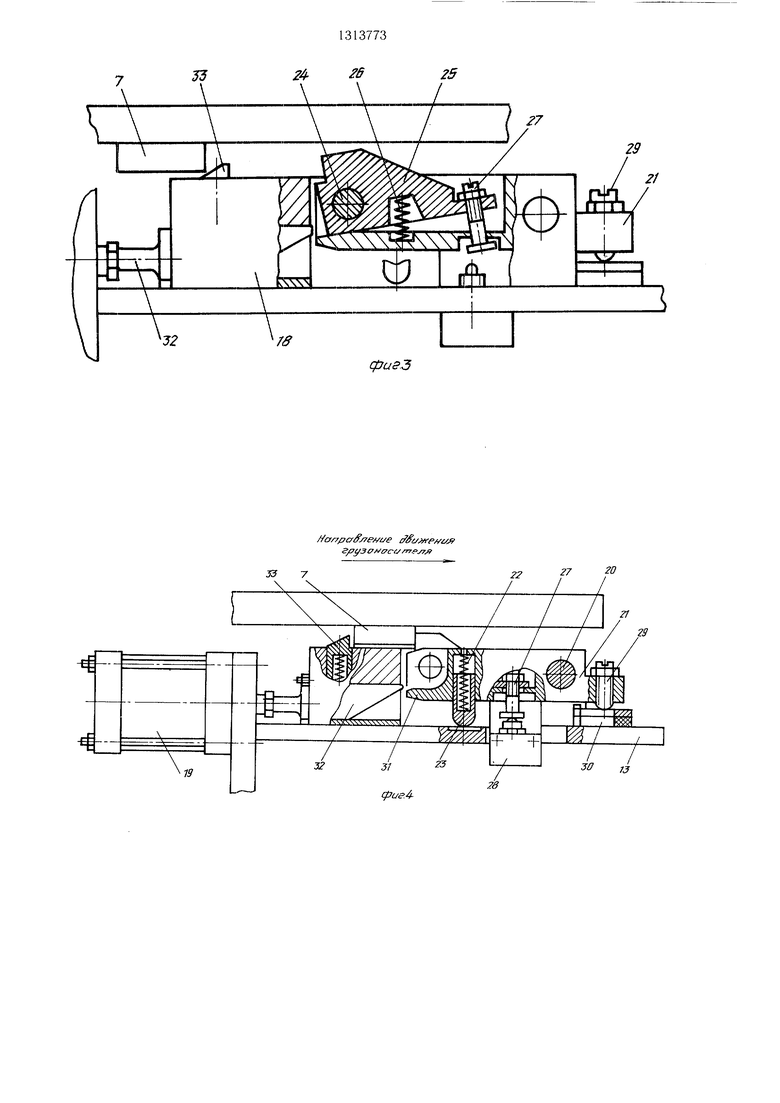
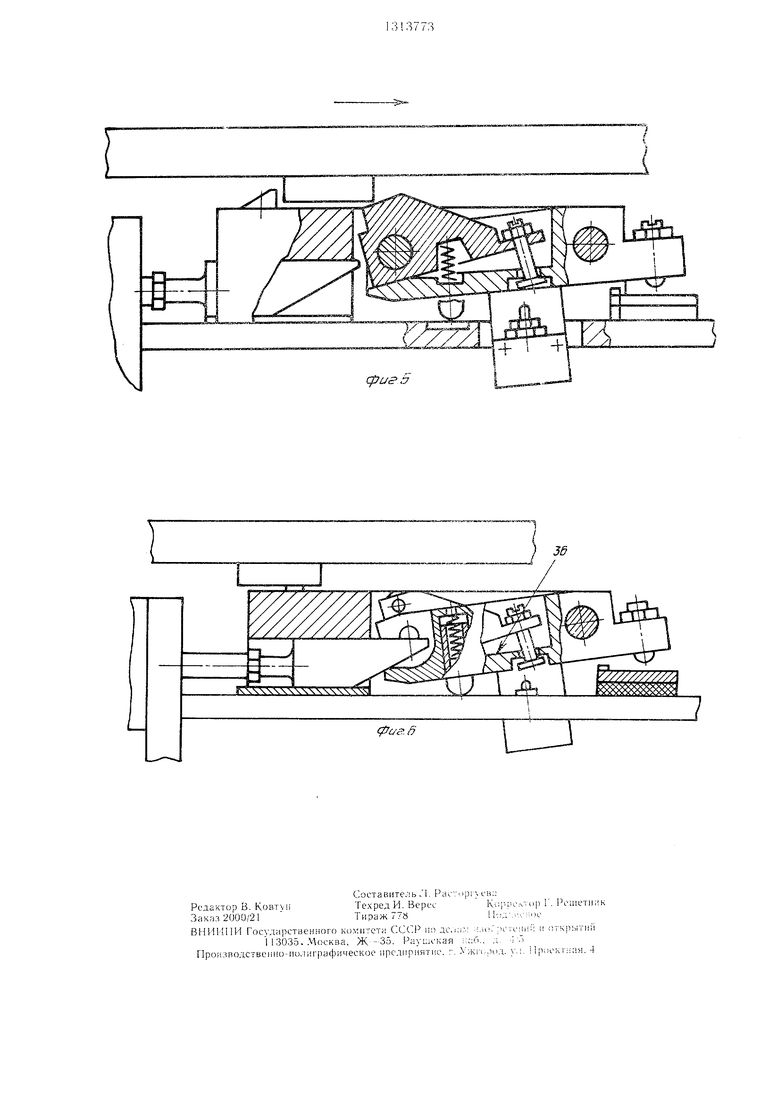
На фиг. 1 изображено нодаюн1ее устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - исходное ноложение деталей отсекателя; на фиг. 4 - положение деталей отсекателя неред началом фиксации и нодъема грузо- носителя; на фиг. 5 - положение деталей отеекателя в конце обратного хода механизма фиксации; на фиг. 6 - положение деталей отсекателя в момент про- нускания грузоносителя.
Подающее устройетво содержит станину 1, на которой между ветвями приводного, например роликового конвейера 2, установлен механизм фиксации 3 и сборочная установка 4, например резьбо-завинчиваю- щий станок. На конвейере 2 свободно установлен грузоноситель 5 с закрепленной на нем еобираемой деталью 6.
К грузоносителю 5 прикреплен унор 7 и втулки 8 с отверстиями, предназначенными для размен1ения в них фиксирующих нальцев 9.
Механизм подъема и фиксации 3 предназначен для подъема и фиксации грузоносителя 5 и содержит основание 10 с закрепленными на нем силовым цилиндром 11, переключателем 12, стойкой 13 и направляющим втулками 14, в которых двигаются скалки 15 с закрепленной на них подъемной плитой 16 с фиксирующими пальцами 9. Переключающая пластина 17 прикреплена к левой скалке 15 е целью взаимодействия с переключателем 12. Подъемпая плита 16 имеет вырез, е целью размещения в нем верхней части корпуса 18 и привода 19 отсекателя.
Корпус 18 и привод 19 отсекателя закреплены на стойке 13.
В корнуее 18 отсекателя на оси 20 установлен рычаг 21, в отверстии которого разменхена пружина 22 и плунжер 23, а в вырезе рычага 21 на оси 24 расположена еобачка 25, подпружиненная пружиной 26 и снабженная упорным элементом - винтом 27 для взаимодействия с переключателем 28, закрепленным на рычаге. На рычаге 21 имеется регулировочный винт 29, взаимодействующий е упругим элементом 30 стойки 13, и наз с выступом 31, взаимодействующим со скосом клина 32, соединенным с приводом 19. Клин 32 перемещается в направляющем пазу корпуса 8. Защелка 33 препятствует отскоку грузоно- сптеля 5. Силовой цилиндр 11 воздействует на под ьемную плиту 16 при помощи упора 34 и вилки 35. Выступ 31 имеет верхнюю и нижнюю кромки, при этом выс
0
5
0
5
0
5
0
5
тун 31 расположен пиже оси 20 с возможностью взаимодействия его верхней кромки с клином 32. Защелка 33 и нод- нружиненная собачка 25 расположены на стойке 13 с возможностью взаимодействия с упором 7.
Подаюц ее устройство работает следующим образом.
Грузоноситель 5 е закрепленной на нем еобираемой деталью 6 движется по конвейеру 2 на еборочпую установку 4, нажимая при этом упором 7 на собачку 25, поворачивая ее вокруг оси 24 до соприкосновения с нижней плоскостью 36 паза в рычаге 21, поворачивая рычаг 21 вокруг оси 20. При этом регулировочный винт 29 упирается в упругий элемент 30, и вся энергия удара грузоноеителя на отсекатель гасится в нем.
Одновременно винт 27, расположенный на еобачке 25, нажимает на переключатель 28 и включает силовой цилиндр 11. Упор 34 цилиндра 11, двигаясь вверх через вилку 35, поднимает подвижную плиту 16 с грузоносителем 5. При этом фиксирующие пальцы 9 входят в отверстия втулок 8, точно ориентируя грузоноситель 5 относительно сборочной установки 4.
Грузоноситель 5, достигнув крайнего верхнего положения, выводит упор 7 из зацепления с собачкой 25 и она под действием пружины 26 занимает иеходное положение. Одновременно переключающаяся пластина 17 нажимает на переключатель 12 и включается сборочная установка 4.
По окончании сборочной операции с установки 4 подается сигнал на силовой цилиндр 11, и он опускает плиту 16 с грузоносителем 5. При этом упор 7 своей нижней плоскостью нажимает сверху на собачку 25 и, преодолевая сопротивления пружины 22, прижимает ее вместе с рычагом 21 вниз., поворачивая его вокруг оси 20.
Грузоноситель 5 встает на ролики конвейера 2 и уходит с подающего уетройст- ва, при этом собачка 25 проскальзывает по упору 7, а пружина 22 возвращает рычаг 21 в исходное положение, заверщая цикл работы устройства.
В случае технологической необходимости, когда грузоноситель 5 свободно проходит сборочную установку 4 или деталь 6 другой модификации и не подлежит операции на сборочной установке 4, считыватель, закренленный на грузоноеителе 5, (не показан) нажимает на переключатель (не показан), установленный на конвейере 2 перед уетановкой 4, включает привод, например силовой цилиндр 19, щток цилиндра выдвигается, перемещая закрепленный на нем клин 32 в правое крайнее положение, при этом клин 32 своим скосом взаимодействует с выступом 31 и отжимает рычаг 21 вместе с собачкой 25 вниз, поворачивая его воркруг оси 20 и преодолевая сопротивление пружины 22. Собачка 25 выходит из зацепления с упором 7, и грузоноситель 5 свободно проходит под установкой 4, нажимая на выключатель (не показан), установленный на конвейере 2, подается сигнал на цилиндр 19, клин 32 и рычаг 21 с собачкой 25 возвращаются в исходное положение (фиг. 3).
В случае длительного пропуска грузоно- сителей 5 под установкой 4 не будет сигнала на включение привода 19, клин 32 будет оставаться в крайнем правом положении, удерживая рычаг 21 с собачкой 25 внизу, и грузоноситель 5 будет свободно проходить под установкой 4.
Такое выполнение подающего устройства позволяет повысить надежность его работы, уменьшить энергозатраты (отпадает необходимость постоянной работы привода отсека- теля при остановке и фиксации грузопо- сителя) за счет применения обратного клина с выступом на рычаге и принудительного отвода собачки из зацепления с упором грузоносителя.
Конструкция предлагаемого устройства обеспечивает работу устройства без остановки на переналадку и позволяет автоматизировать работу устройства.
Использование регулировочного винта и упругого элемента снижает динамические нагрузки на устройство и позволяет в процессе эксплуатации регулировать положение собачки относительно упора грузоносителя.
Формула изобретения
Подающее устройство, содержащее расположенные на станине механизм перемещения платформы с упором и переключатель, установленный с возможностью взаимодействия с подъемной плитой, на которой смонтированы фиксаторы для платформы, расположенные на стойке с возможностью взаимодействия с упором платформы подпружиненная защелка и подпружиненная собачка с упорным элементом, размещенная на одной оси, а на другой оси размещен подпружиненный поворотный рычаг с закрепленным на нем переключателем, установленным с возможностью взаимодействия с упорным элементом подпружиненной собачки, и приводной фиксирующий элемент с клином, отличающееся тем, что, с целью
0 повыщения производительности и снижения энергоемкости устройства, поворотный рычаг выполнен с выступом, который имеет верхнюю и нижнюю кромки, при этом выступ расположен ниже оси с возможностью
5 взаимодействия его верхней кромки с клином, при этом стойка имеет упругий элемент, а поворотный рычаг имеет регулировочный винт, установленный с возможностью взаимодействия с упругим элементом стойки.
фиг,1
29
фи$3
| название | год | авторы | номер документа |
|---|---|---|---|
| Подающее устройство | 1987 |
|
SU1447722A1 |
| Подающее устройство | 1983 |
|
SU1139611A1 |
| Подающее устройство | 1986 |
|
SU1437179A1 |
| Устройство для фиксации грузоно-СиТЕля | 1979 |
|
SU852732A1 |
| Устройство для фиксации грузоносителей | 1984 |
|
SU1270073A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Тележечный конвейер | 1980 |
|
SU981136A1 |
| Устройство для фиксации грузоносителей | 1980 |
|
SU981137A1 |
| Устройство для фиксации грузоносителя | 1978 |
|
SU724399A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
Изобретение относится к машиностроению, в частности к подающим устройствам автоматических и автоматизированных сборочных линий. Цель - повышение производительности и снижение энергоемкости устройства. На станине расположены механизм перемещения платформы с выступом и переключатель 12. Он установлен с возможностью взаимодействия с подъемной плитой 16 с упором 7 и упругим элементом, на котором размешены фиксаторы 9 для платформы. На стойке 13 расположены подпружиненные защелка 33 и собачка (С) 25 с упорным элементом 27. На оси 20 смонтирован приводной фиксирующий элемент с клином и подпружиненный поворотный рычаг (ПР) 21 с переключателем 28. Причем ПР 21 выполнен с выступом 31, имеющим верхнюю и нижнюю кромки Выступ 31 расположен ниже оси 20 для взаимодействия его верхней кромки с клином. При этом ПР 21 имеет регулировочный винт 29, установленный с возможностью взаимодействия с упругим элементом стойки 13. При подаче сигнала плита 16 с грузоносителем опускается. Упор 7 нажимает на С 25, прижимая ее вместе с ПР 21 вниз и поворачивая последний вокруг оси 20. Грузоноситель уходит с подающего устройства. В это время С 25 проскальзывает по упору 7, а ПР 21 возвращается в исходное положение. 6 ил. (Л 33 7 31 25 26 27 20 21 2Э 16 со со со 
f/o/-rflcfff ef/ue ef uM pf/f/ Sf y3CfJcfcc/frre
29
cpue.4Редактор В. KOBTVH Заказ 2000, 21
I . I oiiieTHHK
Производствен по-пили графическое предприятие. .
| Подающее устройство | 1981 |
|
SU1039828A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Подающее устройство | 1983 |
|
SU1139611A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
