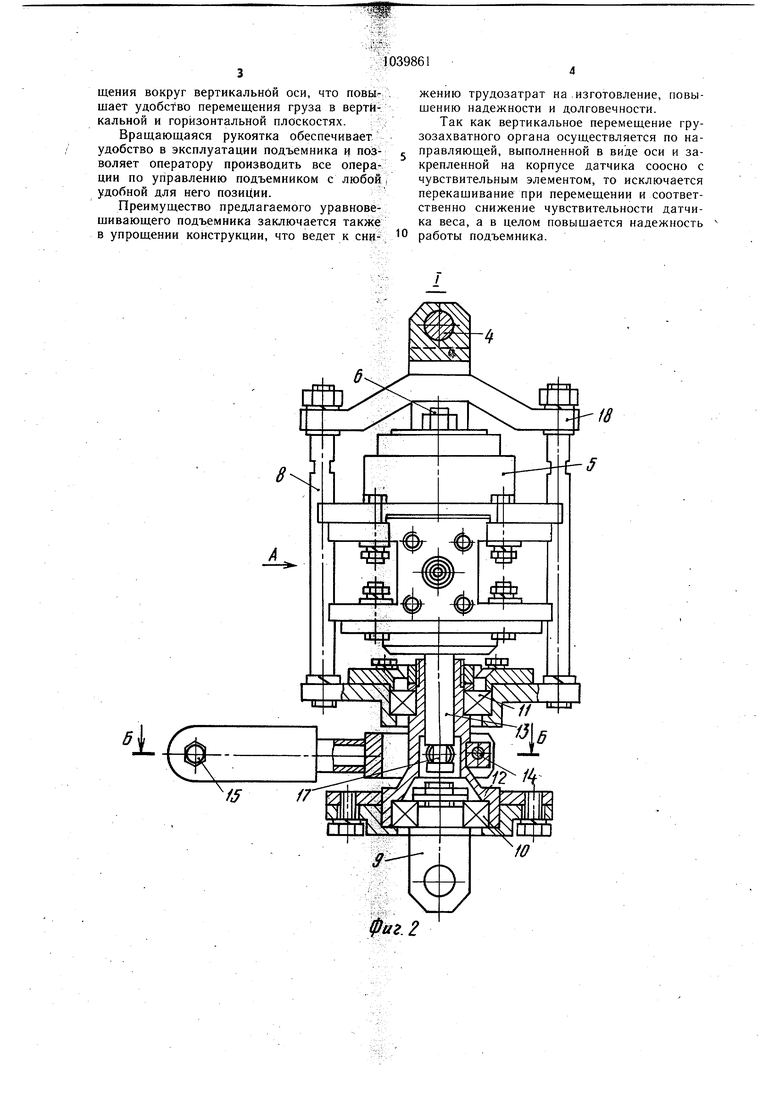
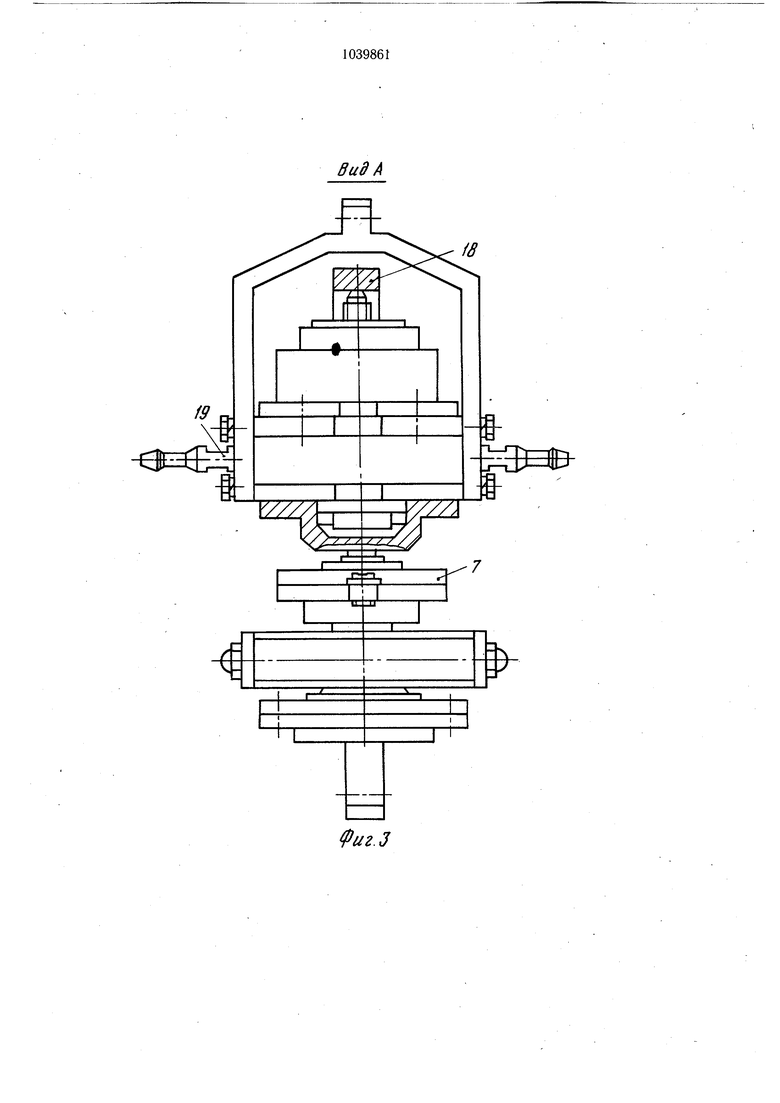
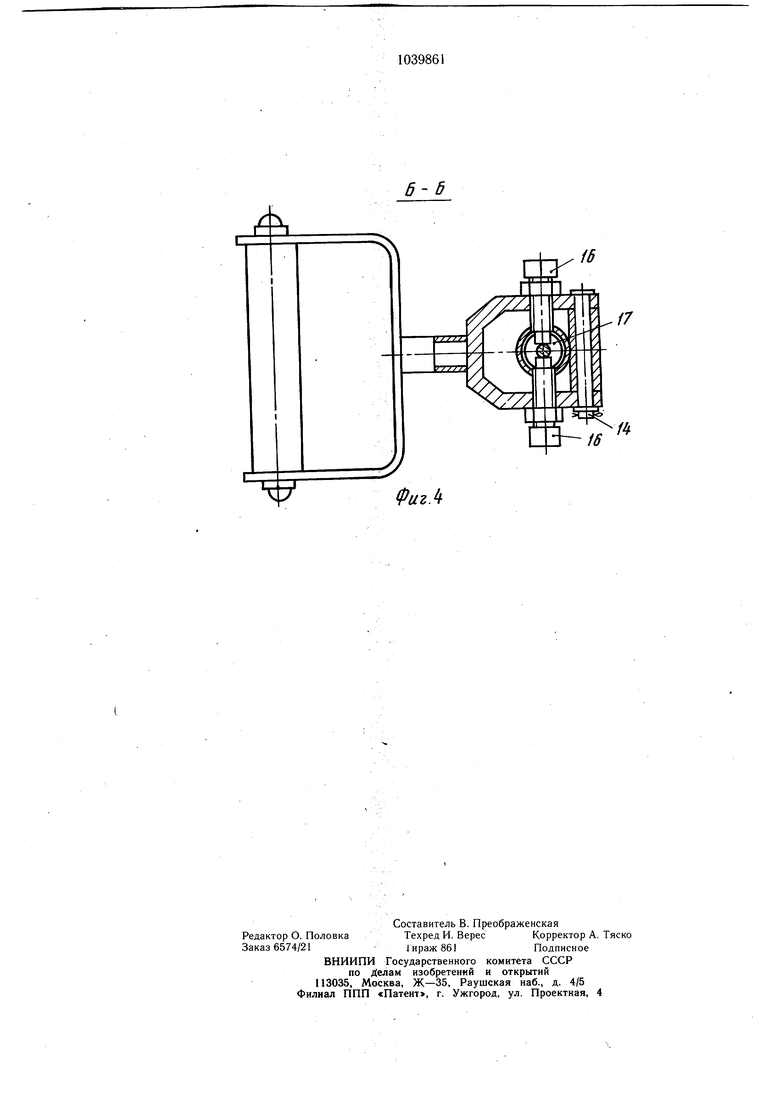
Изобретение относится к подъемно-транспортно.му оборудованию, а именно к уравновешивающим подъемникам. Известен уравновешивающий подъемник, содержащий грузовую стрелу, силовой -цилиндр, датчик веса, установленный с возможностью вращения на оси, щарнирно связанный со стрелой, грузозахватный орган, взаимодействующий с чувствительным элементом датчика веса, и рукоятку управления, щарнирно закрепленную на датчике веса и взаимодействующую с грузозахватным органом 1. Необходимость подвода сжатого воздуха к вращающемуся датчику веса определяет наличие воздухоподводящей муфты, что усложняет конструкцию иувеличивает габариты датчика веса. Наиболее близким к изобретению техническим рещением является уравновещивающий подъемник, содержащий грузовую стрелу, силовой цилиндр, датчик веса в корпусе, щарнирно закрепленном на конце грузовой стрелы, несущей грузозахватный орган, взаимодействующий с чувствительным элементом датчика веса, и рукоятку управления, взаимодействующую с грузозахватными органом, причем рукоятка управления щарнирно закреплена на грузозахватном органе с возможностью поворота вокруг вертикальной оси 2. Недостатком известного подъемника является наличие круговой направляющей сложной формы с установленным на ней роликом, что повыщает трудозатраты на изготовление его и увеличивает габариты датчика веса. При этом, габариты устройства еще более возрастут, если шарнир, на котором установлена рукоятка, будет расположен на одной вертикальной оси с чувствительным элементом датчика веса, что необходимо для устранения перекащивающего момента при пользовании рукояткой, который снижает чувствительность центровки. Так как вертикальное перемещение грузозахватного органа осуществляется по двум направляющим отверстиям в корпусе, то малейшее отклонение от соосности осей отверстий с осями направляющих щпилек грузозахватного органа вызывает повышение трения, что снижает чувствительность датчика веса. Целью изобретения является упрощение конструкции подъемника и повышение его чувствительности. Для достижения поставленной цели в уравновещивающем подъемнике, содержащем грузовую стрелу, силовой цилиндр, датчик веса в корпусе, щарнирно закрепленном на конце грузовой стрелы, несущей грузозахватный орган, взаимодействующий с чувствительным элементом датчика веса, и рукоятку управления, взаимодействующую с грузозахватным органом, причем рукоятка 1 Г управления щарнирно закреплена на грузозахватном органе с возможностью поворота вокруг вертикальной оси, рукоятка управления снабжена цапфами, а вертикальная ось выполнена с кольцевой проточкой, взаимодействующей с цапфами, и закреплена на корпусе датчика веса. На фщ. 1 изображен уравновешивающий подъемник, вид спереди; на фиг. 2 - узел I на фиг. I; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2. Уравновещивающий подъемник содержит грузовую стрелу 1, выполненную в виде щарнирного параллелограмма, закрепленную на стойке 2. Продолжением одной из меньших сторон параллелограмма является рычаг 3, на конце которого посредством шарнира 4 закреплен корпус датчика 5 веса, имеющий чувствительный элемент 6. На датчике 5 веса подвешен грузозахватный орган 7, выполненный в виде рамки 8 и захватного элемента например проущины 9, которые соединены посредством подщипников 10 и 11 с втулкой 12. Втулка 12 находится на оси 13, закрепленной на корпусе датчика 5 веса соосно с чувствительным элементом б, с возможностью вращения и вертикального перемещения. На втулке 12 с помощью оси 14 закреплена рукоятка 15, которая своими цапфами 16 взаимодействует с кольцевой проточкой 17 оси 13. Верхней планкой 18 рамка 8 взаимодействует с чувствительным элементом 6 датчика 5 веса. Датчик 5 веса посредством щтуцеров 19 связан магистралью управления пневмоцилиндром 20 и источником сжатого воздуха ( показан). Работает уравновешивающий подъемник следующим образом. Масса грузовой стрелы уравновешена противовесом 21. Масса грузозахватного органа 7 и груза 22 через планку 18 воздействует на чувствительный элемент 6 датчика 5 веса и автоматически уравновещивается давлением в пневмоцилиндре 20. Горизонтальное перемещение груза осуществляется рычагом 3 или рукояткой 15, находящейся в нейтральном (горизонтальном) положении. Для подъема или опускания груза оператор, поворачивая рукоятку 15 вверх (при подъеме груза) или вниз (при опускании), дополнительно воздействует на чувствительный элемент 6, при этом автоматически увеличивается или уменьщается, соответственно, давление в цилиндре, что при неизменной массе груза приводит к подъему иди опусканию последнего, которое прекращается в момент возвращения рукоятки в нейтральное положение. В предлагаемой, конструкции уравновещивающего подъемника рукоятка управления датчиком веса имеет возможность вращения вокруг вертикальной оси, что повышает удобство перемещения груза в вертикальной и горизонтальной плоскостях.
Вращающаяся рукоятка обеспечивает удобство в эксплуатации подъемника и позволяет оператору производить все операции по управлению подъемником с любой удобной для него позиЦии.
Преимущество предлагаемого уравновещивающего подъемника заключается также в упрощении конструкции, что ведет к снижению трудозатрат на .изготовление, повыщению надежности и долговечности.
Так как вертикальное перемещение грузозахватного органа осуществляется по направляющей, выполненной в виде оси и закрепленной на корпусе датчика соосно с чувствительным элементом, то исключается перекащивание при перемещении и соответственно снижение чувствительности датчика веса, а в целом повыщается надежность работы подъемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |
| Уравновешивающий подъемник | 1987 |
|
SU1437344A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Система управления уравновешивающим подъемником | 1980 |
|
SU895904A2 |
| Уравновешивающий подъемник | 1977 |
|
SU751787A1 |
УРАВНОВЕШИВАЮЩИЙ ПОДЪЕМНИК, содержащий грузовую стрелу, силовой цилиндр, датчик веса в корпусе, шарнирно закрепленном на конце грузовой стрелы, несущей грузозахватный орган, взаимодействующий с чувствительным элементом датчика веса, и рукоятку управления, взаимодействующую с грузозахватным органом, причем рукоятка управления щарнирно закреплена на грузозахватном органе с возможностью поворота вокруг вертикальной оси, отличающийся тем, что, с целью упрощения его конструкции и повышения чувствительности, рукоятка управления снабжена цапфами, а вертикальная ось выполнена с кольцевой проточкой, взаимодействующей с цапфами, и закреплена на корпусе датчика веса. (Л со со 00 Oi
Вид А
иг.З
f8
J
16
1l
16
ФигЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 759449, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3312371/11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
