(54) СИСТЕМА УПРАВЛЕНИЯ УРАВНОВЕШИВАЮЩИМ ПОДЪЕМНИКОМ
1
Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к подъемникам с автоматическим уравновешиванием поднимаемого груза.
По основному авт. св. № 655638 известна система управления уравновешивающим подъемником, содержащая силовой орган, пневматически соединенный с напорной магистралью, с которой пневматически соединены устройство изменения давления и датчик веса 1.
Недостатком данной системы является расположение датчика веса между грузовым рычагом и грузозахватным органом, что создает дополнительную нагрузку на подъемник, повышает металлоемкость конструкции, понижается. грузоподъемность подъемника, так как с увеличением грузоподъемности уравновешивающего подъемника габариты и вес датчика также возрастают.
Цель изобретения - уменьшение металлоемкости и увеличение грузоподъемности уравновешивающего подъемника.
Поставленная цель достигается тем, что датчик веса установлен на конце стрелы, противоположном грузозахватному органу.
и соединен с последним посредством гибкого элемент .
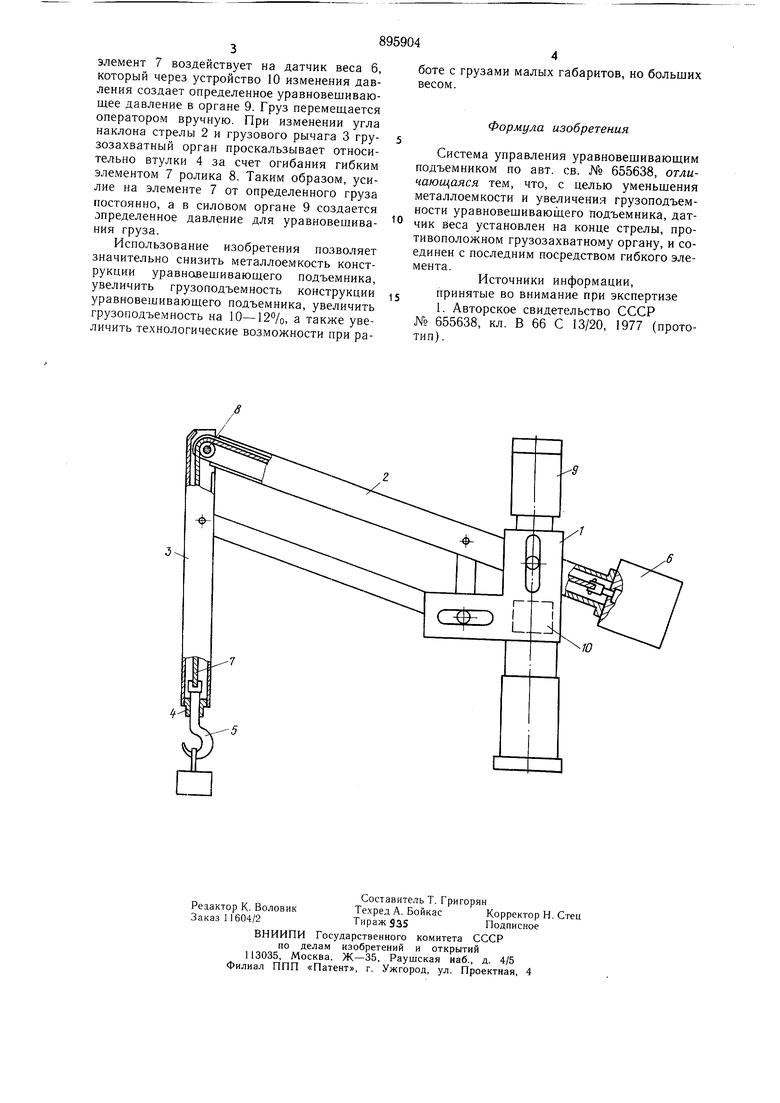
На чертеже изображена система упрае ления уравновешивающего подъемника, общий вид.
Уравновешивающий подъемник содержит стойку 1 с закрепленной на ней стрелой 2 в виде шарнирного параллелограмма. На стреле закреплен грузовой рычаг 3, на конце которого, через направляющую втулку 4, закреплен грузозахватный орган
10 5. На противоположном от грузозахватного органа 5 конце стрелы 2 закреплен датчик веса 6, который служит одновременно противовесом и соединен посредством гибкого элемента 7, через направляющий ролик 8, с органом 5. Стрела 2 связана с силовым
5 органом 9, например пневматическим. Орган 9 пневматически соединен с напорной магистралью (не показана), с которой пневматически соединены устройство 10 изменения давления и датчик веса 6.
Подъемник работает следующим образом.
Вес поднимаемого груза через грузозахватный орган 5 и связанный с ним гибкий
элемент 7 воздействует на датчик веса 6, который через устройство 10 изменения давления создает определенное уравновешивающее давление в органе 9. Груз перемещается оператором вручную. При изменении угла наклона стрелы 2 и грузового рычага 3 грузозахватный орган проскальзывает относительно втулки 4 за счет огибания гибким элементом 7 ролика 8. Таким образом, усилие на элементе 7 от определенного груза постоянно, а в силовом органе 9 создается определенное давление для уравновешивания груза.
Использование изобретения позволяет значительно снизить металлоемкость конструкции уравновешивающего подъемника, увеличить грузоподъемность конструкции уравновешивающего подъемника, увеличить грузоподъемность на 10-12%, а также увеличить технологические возможности при работе с грузами малых габаритов, но больших весом.
Формула изобретения
Система управления уравновещивающим подъемником по авт. св. № 655638, отличающаяся тем, что, с целью уменьшения металлоемкости и увеличения грузоподъемности уравновещивающего подъемника, датчик веса установлен на конце стрелы, противоположном грузозахватному органу, и соединен с последним посредством гибкого элемента.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 655638, кл. В 66 С 13/20, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Устройство для управления пневматическим приводом стрелы уравновешенного подъемника | 1980 |
|
SU1043099A1 |
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
