2. Подъемник по п. 1, отличающийся тем, что рукоятка управления выполнена с шарнирно закрепленными на ней роликами, размещёнными между клеммовыми губками с возможностью взаимодействия с ними,
клеммовые губки подпружинены, а третье плечо несущего элемента выполнено с упором для ограничения поворота рукоятки управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1987 |
|
SU1437344A1 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
1. УРАВНОВЕШИВАЮЩИЙ ПОДЪЕМНИК, содержащий грузовую стрелу, установленные на конце грузовой стрелы мембранный датчик массы, чувствительный элемент которого размещен с возможностью взаимодействия с .мембраной посредством пружины, грузозахватный орган, щарнирно закрепленный на несущем элементе. ч размещенном с возможностью взаимодействия с чувствительным элементом датчика массы, рукоятку управления, закрепленную на несущем элементе, и клеммовые губки, отличающийся тем, что, с целью повышения производительности, он снабжен штангой, размещенной между клеммовыми губками с возможностью зажима последними, шарнирно закрепленным на штанге двухплечим рычагом и тягой, один конец которой соединен с мембраной датчика массы, а другой - с одним плечом двухплечего рычага, при этом несущий элемент представляет собой шарнирно соединенный с концом грузовой стрелы трехплечий рычаг, на одном плече которого закреп,г1ен грузозахватный орган, i второе плечо шарнирно соединено с вторым плечом двухплечего рычага, а на третьем (Л плече шарнирно закреплена рукоятка управления. сх UD СО
Изобретение относится к подъемно-транспортным механизмам, а именно к уравновешивающим подъемникам.
Цель изобретения - повыщение производительности.
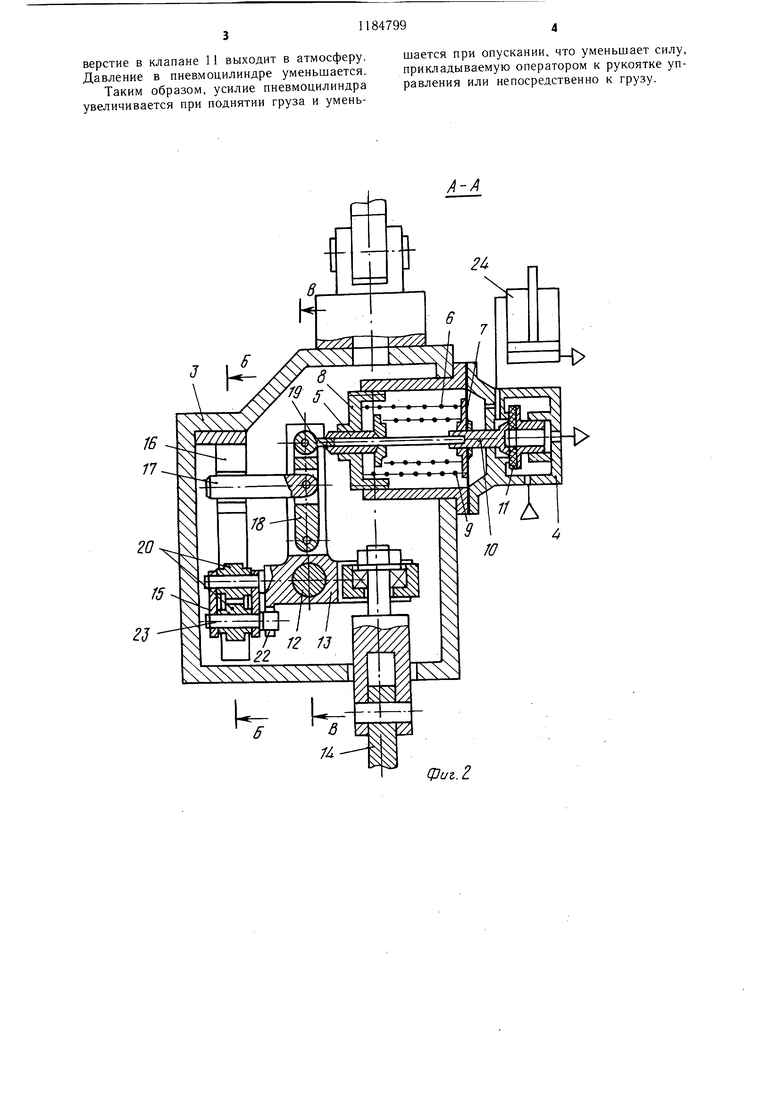
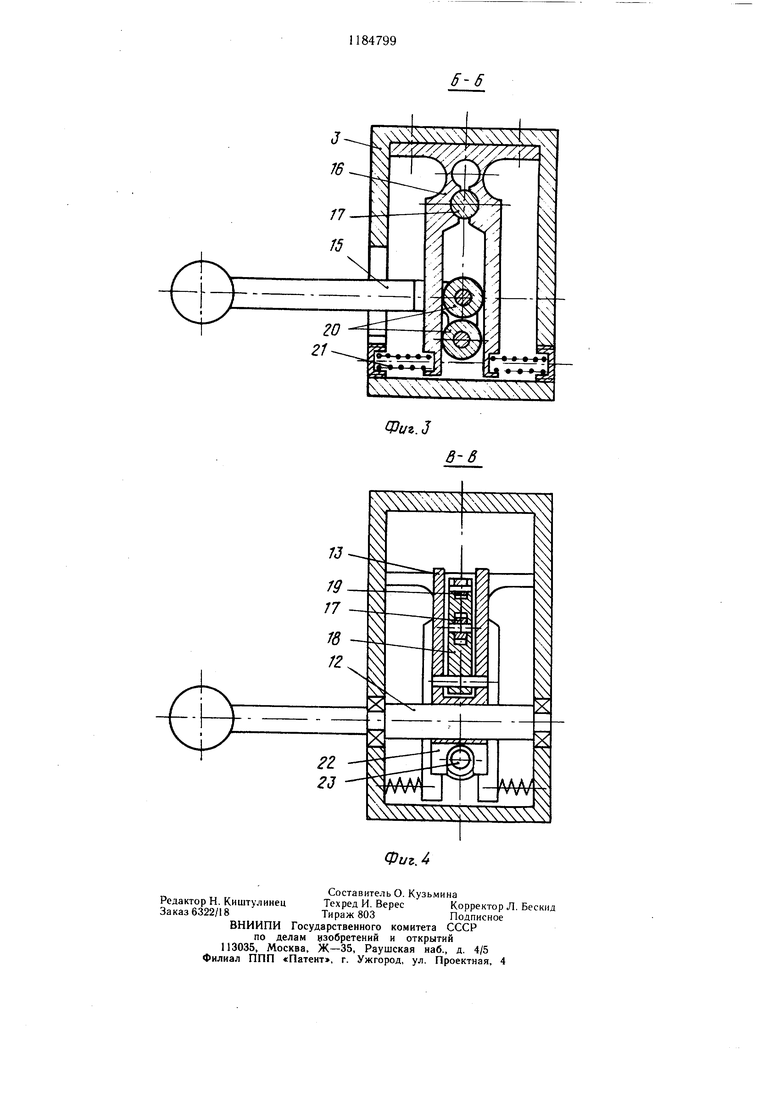
На фиг. 1 изображен подъемник, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2.
Уравновешивающий подъеХ1ник содержит грузовую стрелу 1 в виде шарнирного параллелограмма, закрепленную на стойке 2, на конце стрелы шарнирно закреплен корпус 3, в котором неподвижно установлен мембранный датчик 4 массы, чувствительный элемент 5 которого размещен с возможностью взаимодействия посредством пружины 6 с мембраной 7. Между мембраной 7 и резьбовой втулкой 8 установлена пружина 9, а с мембраной соединен толкатель 10, упирающийся в клапан 11. В корпусе 3 на оси 12 шарнирно установлен несущий элемент 13, выполненный в виде трехплечего рычага, на одном плече которого шарнирно закреплен грузозахватный орган 14, второе плечо взаимодействует с чувствительным элементом 5, а на третьем плече щарнирно закреплена рукоятка 15 управления. В корпусе 3 закреплены также клеммовые губки 16, между которыми размещена штанга 17 с шарнирно закрепленным на ней двухплечим рычагом 18, одно плечо которого посредством тяги 19 соединено с мембраной 7 датчика массы, а второе плечо шарнирно соединено с вторым плечом несущего элемента 13. Рукоятка 15 управления выполнена с шарнирно закрепленными на ней -роликами 20, размещенными между стянутыми пружинами 21 клеммовыми губками 16 с возможностью взаимодействия с ними. Третье плечо несущего элемента выполнено с упором 22, взаимодействующим с осью 23 ролика 20 и ограничивающим поворот рукоятки 15.
Вход датчика 4 массы связан с магистралью сжатого воздуха, а выход с силовым органом - пневмоцилиндром 24.
Подъемник работает следующим образом.
В исходном положении штанга 17 зажата клеммовыми губками 16. При подъеме груза оператор поворачивает рукоятку 15
управления вверх, при этом ролики 20 разводят клеммовые губки 16, сжимая пружины 21 и освобождают штангу 17. Вес груза через грузозахватный орган 14 и несущий элемент 13 воздействует на чувствительный элемент 5 датчика 4 массы, на мембрану которого воздействует также пружина 9, обеспечивающая уравновещивание стрелы 1 и корпуса 3 с установленными в нем деталями. Таким образом, давление в пневмоцилиндре устанавливается в зависимости от веса груза и усилия пружины 9. При дальнейщем повороте рукоятки 15 ось 23 упирается в упор 22 несущего элемента 13 и поворачивает последний по часовой стрелке (фиг. 2), при этом он воздействует через чувствительный элемент 5 и пружину 6 на мембрану 7 и толкатель 10, клапан 11 открывается и пропускает дополнительную порцию воздуха в пневмоцилиндр 24, давление в пневмоцилиндре увеличивается и он помогает оператору преодолеть силы трения в шарнирах подъемника и в пневмоцилиндре.
Аналогично работает подъемник при опускании груза.
При управлении подъемником за рукоятку 15 щтанга 17 с рычагом 18 свободно перемещаются, так как клеммовые губки 16 разжаты и тяга 19 не оказывает воздействия на мембрану 7.
При необходимости точных манипуляций с грузом, что удобнее производить, держась за него оператор отпускает рукоятку 15, при этом пружины 21 стягивают клеммовые губки 16, которые, воздействуя на ролики 20, возвращают рукоятку 15 в исходное положение и зажимают щтангу 17. Если после этого оператор поднимает груз, то несущий элемент 13 поворачивается против часовой стрелки (фиг. 2) и поворачивает рычаг 18 вокруг оси, закрепленной в штанге 17, по часовой стрелке. Рычаг 18 через тягу 19 воздействует на мембрану 7 и толкатель 10 и открывает клапан 11, увеличивая давление в пневмоцилиндре 24.
При опускании груза несущий элемент 13 поворачивается по часовой стрелке, рычаг 18 - против часовой стрелки и через тягу 19 воздействует на толкатель 10, который отрывается от клапана 11, и часть воздуха из пневмоцилиндра 24 через отверстие в клапане 11 выходит в атмосферу.
Давление в пневмоцилиндре уменьшается.
Таким образом, усилие пневмоцилиндра
увеличивается при поднятии груза и уменьшается при опускании, что уменьшает силу, прикладываемую оператором к рукоятке управления или непосредственно к грузу.
А-
Фс/г.2
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
