на рамке 8 по дуге, центром которой является ось шарнира 4, что позволяет поворачивать рычаг 3, а с ним и толкатель 15 на любой угол относительно вертикальной оси датчика 5. На рычаге 3 закреплены упоры 18, ограничивающие перемещение рукоятки 13 вверх и вниз.
Работает подъемник следующим образом.
Вес органа 7 с грузом 19 или без груза воздействует на элемент 6 датчика веса 5, который при этом открывает клапан и пропускает определенную порцию сжатого воздуха в магистраль управления пневмоцилиндром И. Таким образом, давление в цилиндре устанавливается в зависимости от веса груза и грузозахватного органа, т. е. уравновещивает этот вес. Перемещение стрелы 1 осуществляется вручную за рукоятку 13. Рукоятка может находиться в горизонтальном положении (фиг. 1). При этом толкатель 15 находится в нейтральном положении и не воздействует на чувствительный элемент 6. Груз уравновещен на стреле, но для перемещения рычага 3 требуются значительные усилия, чтобы преодолеть силу трения, во-первых, резиновых манжет о зеркало цилиндра 11, а вовторых, щарниров параллелограмма.
Для уменьщения этого усилия при подъеме груза рукоятку 13 поворачивают на щарнире 12 вверх. При этом ее противоположное плечо 14 давит на толкатель 15. Вертикальное перемещение толкателя вызывает перемещение всего грузозахватного органа 7, который воздействует на элемент 6 датчика веса 5. В результате последний допускает дополнительную порцию воздуха в пневмоцилиндр 11, усилие в котором теперь превышает вес груза. Груз, как бы «взмывает без дополнительного усилия оператора.
При опускании груза рукоятку 13 опускают вниз, нри этом приподнимают толкатель 15, который высвобождает элемент 6, как бы снимая с него часть груза, что автоматически приводит к уменьщению давления в пневмоцилиндре 11 и груз «иадает.
«Взмывание или «падение груза прекращаются сейчас же, если рукоятку 13 отпустить. Она возвращается в нейтральное положение, в результате происходит уравновешивание груза.
Оптимальный угол поворота рукоятки вверх и вниз устанавливается эмпирически посредством упоров 18.
Возможны другие варианты исполнения предлагаемого устройства.
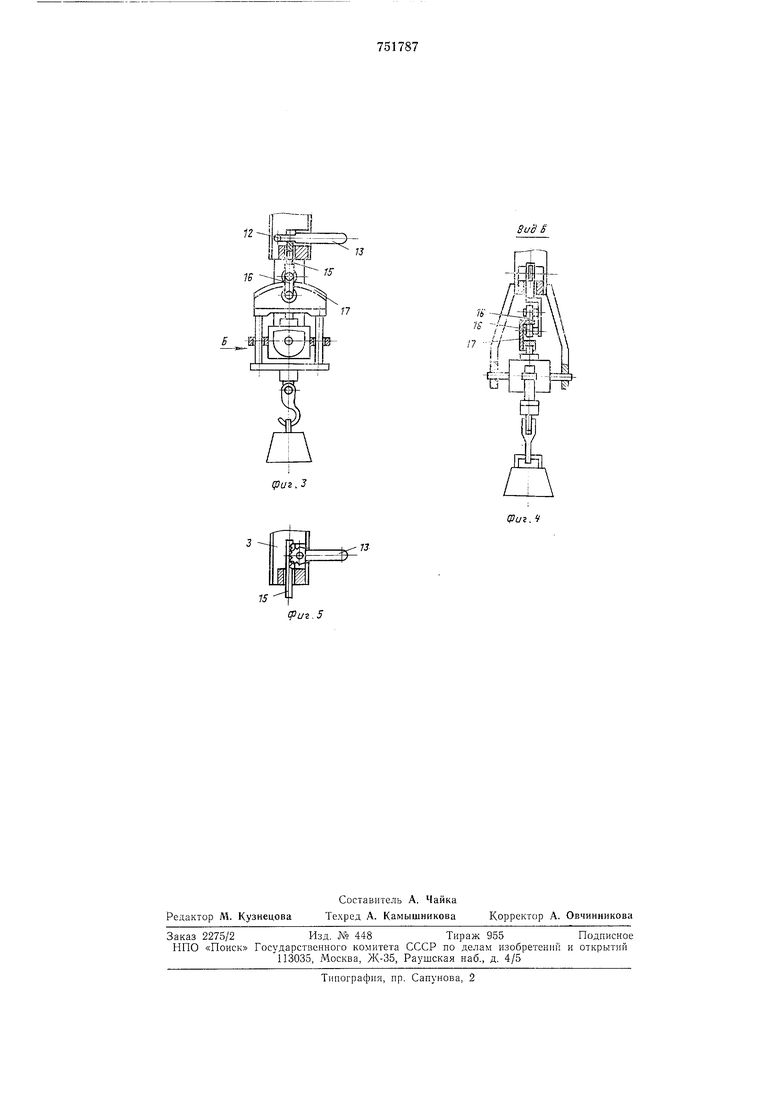
Так на фиг. 3 показана конструкция, в которой рукоятка 13 установлена на щарнире 12 таким образом, что образуется не двуплечий рычаг, как на фиг. 1, а одноплечий. В этом случае подъему груза соответствует поворот рукоятки вниз, а опусканию - вверх. Па той же фигуре показан вариант выполнеиия конца толкателя 15 в виде двух роликов 16, охватывающих направляющий вал 17.
На фиг. 5 показан вариант, когда рукоятка 13 связана с толкателем через реечную передачу.
Возможны и другие виранты.
Форм у л а изобретен и я
Уравиовешивающий иодъемник, содержащий грузовую cTpe;iy в виде шарнирного параллелограмма, одна из меньших сторон которого выполнена в виде рычага, силовой цилиндр, датчик веса, установленный на конце рычага и взаимодействующий с грззозахватным органом, и рукоятку, установленную на рычаге, от л и ч а ю ид и и с я тем, что, с целью снижеиия усилий перемещения стрелы иодъемника в вертикальной плоскости, рукоятка содержит подвижный вдоль оси рычага толкатель с роликами, а грузозахватный орган - дугообразную направляющую, на которой расноложены ролики толкателя, причем рукоятка установлена шарнирно на рычаге.
Источники информацин, нринятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке N° 2437323/11. кл. В 66С 13/20, 03.01.77.
Bud A
(риг. 2
8uS Б
5
(Риг. f
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |