(54) УРАВНОВЕШИВАЮЩИЙ ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Уравновешивающий подъемник | 1987 |
|
SU1437344A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |


1
Изобретение относится к подъемно-транспортным механизмам, а именно к уравновешивающим подъемникам.
Известен уравновешивающий подъемник, содержащий грузовую стрелу, несущую грузозахватный орган, датчик массы, посредством тяг щарнирно закрепленный на конце стрелы и включающий в себя мембрану и чувствительный элемент, ввзаимодействующий с мембраной и грузозахватным органом 1.10
Недостатком известного подъемника является -сравнительно низкая производительность его работы.
Цель изобретения - повышение производительности, работы подъемника.
Для достижения этой цели подъемник снабжен стопором для запирания чувствительного элемента или грузозахватного органа в положении уравновешивания веса груза относительно стрелы, причем чувствительный элемент посредством пружины соединен го с мембраной.
Кроме того, стопор включает в себя клеммовые губки, охватывающие чувствительный элемент и выполненные с отверстиями, в которые вставлен соединительный элемент, и рукоятку с эксцентриком на конце, щарнирно связанным с соединительным элементом, кроме того, стопор включает в себя винт, соединяющий грузозахватный орган с корпусом датчика массы.
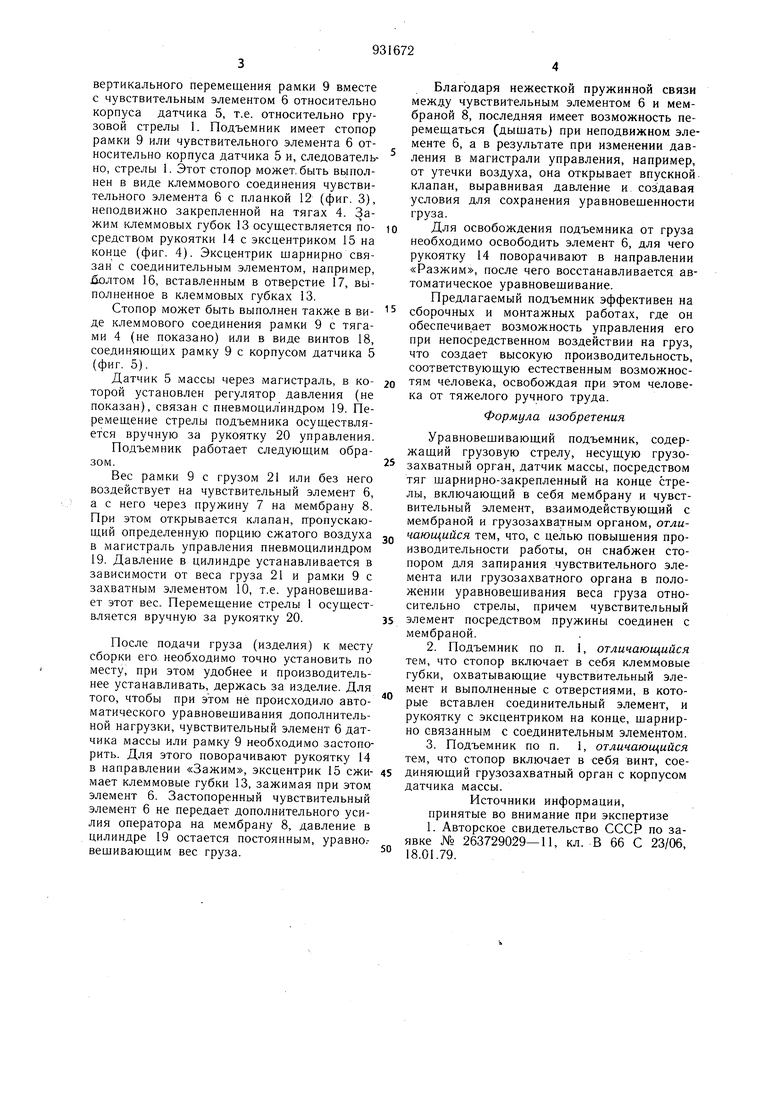
На фиг. 1 - дан уравновешивающий подъемник, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - вариант выполнения стопора.
Уравновешивающий подъемник содержит грузовую стрелу 1, например, в виде шарнирного параллелограмма, закрепленную на стойке 2. На конце стрелы шарнирно на оси 3 закреплены тяги 4, на которых неподвижно закреплен датчик 5 массы.
Датчик 5 имеет чувствительный элемент 6, который посредством пружины 7 соединен с мембраной 8. На датчике 5 подвещен грузозахватный орган, выполненный в виде рамки 9, снабженной захватным элементом, напри,мер, крюком 10. Рамка 9 опирается на чувствительный элемент 6 и проходит через проушины 11, закрепленные на корпусе датчика 5 массы, что обеспечивает возможность вертикального перемещения рамки 9 вместе с чувствительным элементом 6 относительно корпуса датчика 5, т.е. относительно грузовой стрелы 1. Подъемник имеет стопор рамки 9 или чувствительного элемента 6 относительно корпуса датчика 5 и, следовательно, стрелы 1. Этот стопор может, быть выполнен в виде клеммового соединения чувствительного элемента 6 с планкой 12 (фиг. 3), неподвижно закрепленной на тягах 4. Зажим клеммовых губок 13 осуществляется посредством рукоятки 14 с эксцентриком 15 на конце (фиг. 4). Эксцентрик щарнирно связан с соединительным элементом, например, йолтом 16, вставленным в отверстие 17, выполненное в клеммовых губках 13. Стопор может быть выполнен также в виде клеммового соединения рамки 9 с тягами 4 (не показано) или в виде винтов 18, соединяющих рамку 9 с корпусом датчика 5 (фиг. 5). Датчик 5 массы через магистраль, в которой установлен регулятор давления (не показан), связан с пневмоцилиндром 19. Перемещение стрелы подъемника осуществляется вручную за рукоятку 20 управления. Подъемник работает следующим образом. Вес рамки 9 с грузом 21 или без него воздействует на чувствительный элемент 6, а с него через пружину 7 на мембрану 8. При этом открывается клапан, п-ропускающий определенную порцию сжатого воздуха в магистраль управления пневмоцилиндром 19. Давление в цилиндре устанавливается в зависимости от веса груза 21 и рамки 9 с захватным элементом 10, т.е. урановещивает этот вес. Перемещение стрелы 1 осуществляется вручную за рукоятку 20. После подачи груза (изделия) к месту сборки его необходимо точно установить по месту, при этом удобнее и производительнее устанавливать, держась за изделие. Для того, чтобы при этом не происходило автоматического уравновещивания дополнительной нагрузки, чувствительный элемент 6 датчика массы или рамку 9 необходимо застопорить. Для этого поворачивают рукоятку 14 в направлении «Зажим, эксцентрик 15 ежимает клеммовые губки 13, зажимая при этом элемент 6. Застопоренный чувствительный элемент 6 не передает дополнительного усилия оператора на мембрану 8, давление в цилиндре 19 остается постоянным, уравно.вещивающим вес груза. Благодаря нежесткой пружинной связи между чувствительным элементом 6 и мембраной 8, последняя имеет возможность перемещаться (дыщать) при неподвижном элементе 6, а в результате при изменении давления в магистрали управления, например, от утечки воздуха, она открывает впускной клапан, выравнивая давление и создавая условия для сохранения уравновещенности груза. Для освобождения подъемника от груза необходимо освободить элемент 6, для чего рукоятку 14 поворачивают в направлении «Разжим, после чего восстанавливается автоматическое уравновещивание. Предлагаемый подъемник эффективен на сборочных и монтажных работах, где он обеспечивает возможность управления его при непосредственном воздействии на груз, что создает высокую производительность, соответствующую естественным возможностям человека, освобождая при этом человека от тяжелого ручного труда. Формула изобретения Уравновещивающий подъемник, содержащий грузовую стрелу, несущую грузозахватный орган, датчик массы, посредством тяг щарнирно-закрепленный на конце стрелы, включающий в себя мембрану и чувствительный элемент, взаимодействующий с мембраной и грузозахватным органом, отличающийся тем, что, с целью повыщения производительности работы, он снабжен стопором для запирания чувствительного элемента или грузозахватного органа в положении уравновещивания веса груза относительно стрелы, причем чувствительный элемент посредством пружины соединен с мембраной. 2.Подъемник по п. 1, отличающийся тем, что стопор включает в себя клеммовые губки, охватывающие чувствительный элемент и выполненные с отверстиями, в которые вставлен соединительный элемент, и рукоятку с эксцентриком на конце, щарнирно связанным с соединительным элементом. 3.Подъемник по п. 1, отличающийся тем, что стопор включает в себя винт, соединяющий грузозахватный орган с корпусом датчика массы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 263729029-11, кл. В 66 С 23/06, 18.01.79.
f(
5-5
17
ожим
Фи-г.
18
к
ФИ2.5
