2. Манипулятор по п. 1, о т л м чающийся тем, что все колеса одного вала выполнены разного диаметра, а колеса другого вала равного диаметра.
3. Манипулятор по пп.1 и 2, о тличающийся тем, что первое звено выполнено в виде нескольких рамок.
, Манипулятор по п . , о т л k; чающийся тем, ч го захваты, выполнены переменной длины.
5. Манипулятор по пп.1-4, о тл и ч а ю щ и и с я тем, что каждая из сторон рамки выполнена переменной длины.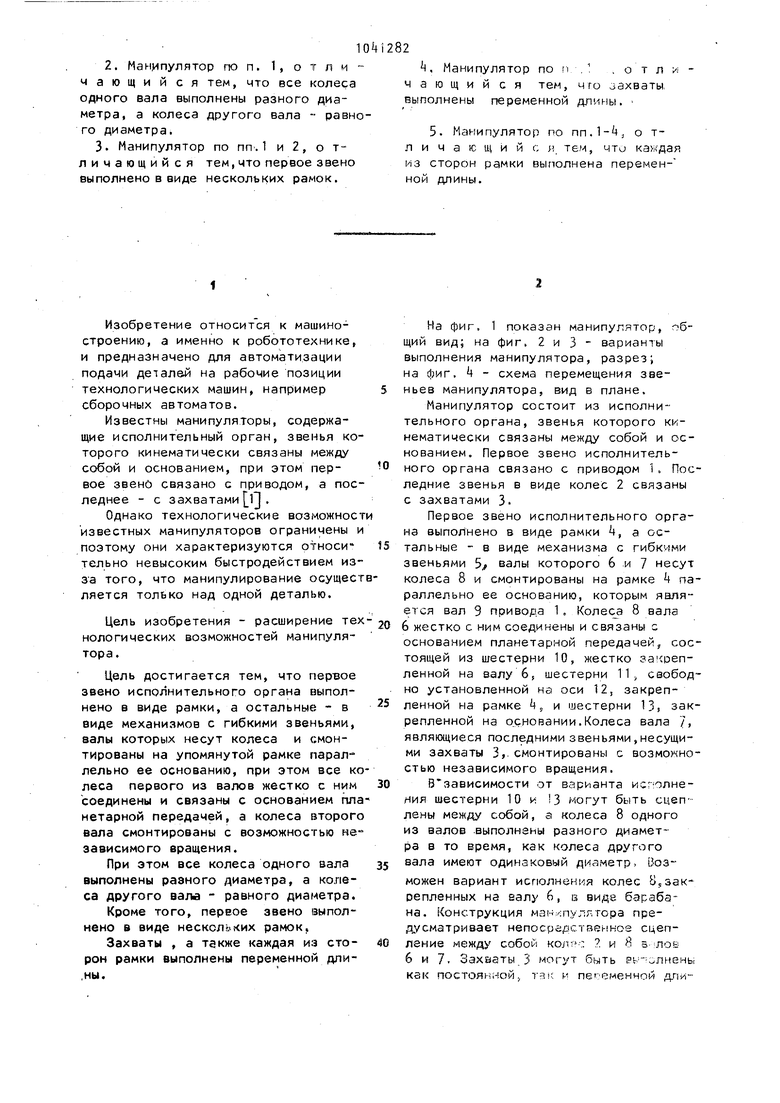
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 1990 |
|
RU2022776C1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| Манипулятор | 1979 |
|
SU841960A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |

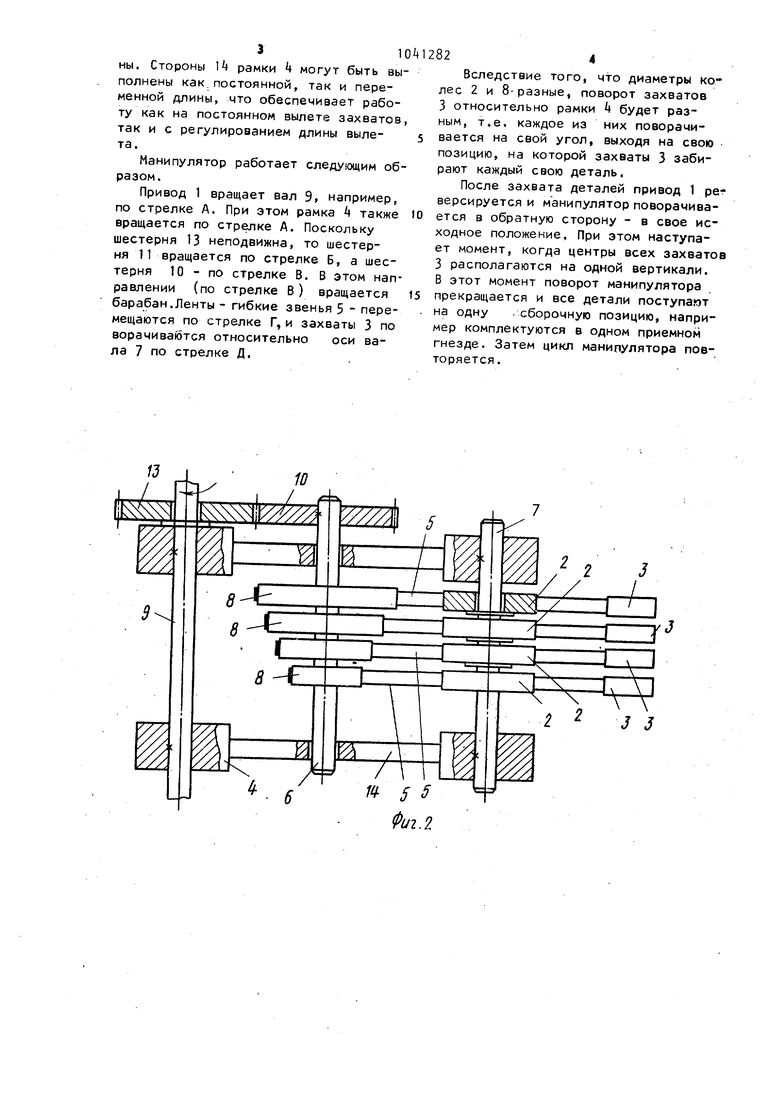
Изобретение относится к машиностроению, а именно к робототехнике, и предназначено для автоматизации подачи деталей на рабочие позиции технологических машин, например сборочных автоматов. Известны манипуляторы, содержащие исполнительный орган, звенья ко торого кинематически связаны между собой и основанием, при этом первое звено связано с приводом, а пос леднее - с захватами Q . Однако технологические возможнос известных манипуляторов ограничены поэтому они характеризуются относи тельно невысоким быстродействием из за того, что манипулирование осущес ляется только над одной деталью. Цель изобретения - расширение те нологических возможностей манипулятора. Цель достигается тем, что первое звено исполнительного органа выполнено в виде рамки, а остальные - в виде механизмов с гибкими звеньями, валы которых несут колеса и смонтированы на упомянутой рамке парал лельно ее основанию, при этом все ко леса первого из валов жестко с ним соединены и связаны с основанием пл нетарной передачей, а колеса второг вала смонтированы с возможностью не зависимого вращения. При этом все колеса одного вала выполнены разного диаметра, а колеса другого вала - равного диаметра. Кроме того, первое звено выполнено в виде нескольких рамок, Захваты , а также каждая из сторон рамки выполнены переменной дли,ны. На фиг. 1 показан манипулятор, общий вид; на фиг. 2 и 3 - варианты выполнения манипулятора, разрез; на фиг. 4 - схема перемещения звеньев манипулятора, вид в плане. Манипулятор состоит из исполнительного органа, звенья которого кинематически связаны между собой и основанием. Первое звено исполнительного органа связано с приводом 1 Последние звенья в виде колес 2 связаны с захватами 3. Первое звено исполнительного органа выполнено в виде рамки k, а остальные - в виде механизма с гибкими звеньями 5 валы которого 6 и 7 несут колеса 8 и смонтированы на рамке k параллельно ее основанию, которым является вал 9 привода 1, Колеса 8 вала 6 жестко с ним соединены и связаны с основанием планетарной передачей состоящей из шестерни 10, жестко закрепленной на валу 6, шестерни 11, свободно установленной на оси 12, закрепленной на рамке и шестерни 13, закрепленной на основании.Колеса вала 7, являщиеся последними звеньями,несущими захваты 3, смонтированы с возможностью независимого вращения. Взависимости от варианта исполнения шестерни 10 и 3 могут быть сцеплены между собой, а колеса 8 одного из валов .выполнены разного диаметра в то время, как колеса другого вала имеют одинаковый диаметр. Возможен вариант исполнения колес репленных на валу 6, в виде барабана. Конструкция мзи;:пуля.тора предусматривает непосре/:1ственноз сцепление собой колг-;: . и И в iлos 6 и 7- Захваты 3 могут быть ры--олиены как постоянной; тзь: и пеоемениой дли31
ны. Стороны 1 рамки k могут быть вы полнены как.постоянной, так и переменной длины, что обеспечивает работу как на постоянном вылете захватов так и с регулированием длины вылета.
Манипулятор работает следу ощим об разом.
Привод 1 вращает вал Э, например, по стрелке А. При этом рамка 4 также вращается по стрелке А. Поскольку шестерня 13 неподвижна, то шестерня 1 1 вращается по стрелке Б, а шестерня 10 - по стрелке В. В этом нап равлении (по стрелке В) вращается барабан.Ленты - гибкие звенья 5 - перемещаются по стрелке Г, и захваты 3 по ворачиваются относительно оси вала 7 по стрелке Д.
412824
Вследствие того, 4to диаметры колес 2 и 8-разные, поворот захватов 3 относительно рамки будет разным, т.е. каждое из них поворачивается на свой угол, выходя на свою позицию, на которой захваты 3 забирают каждый свою деталь.
После захвата деталей привод 1 рег версируется и манипулятор поворачивается в обратную сторону - в свое исходное положение, При этом наступает момент, когда центры всех захватов 3 располагаются на одной вертикали. В этот момент поворот манипулятора 15 прекращается и все детали поступают . на одну .сборочную позицию, например комплектуются в одном приемном гнезде. Затем цикл манипулятора повторяется.
