fOИзобретение относится к машиностроению и может быть использовано в конструкциях схватов манипуляторов работающих в составе робототехничес- ких комплексов, а также в качестве ноги шагающего робота.Цель изобретения - расширение функциональных возможностей.
На чертеже изображен вакуумный схват манипулятора, разрез.
Схват содержит корпус 1 с отверстиями 2, при помощи которых он крепится к руке манипулятора. Корпус 1
поршень 18 начинает движение вверх, пружина 27 сжимается, а шток 19 оттягивает мембрану 14, в результате создается разрежение между деталью и мембраной. Деталь захватывается и переносится рукой манипулятора на разгрузочную позицию. Штоковая полость 6 подключается распределителем 8 к атмосфере, при этом основной поршень 4 и дополнительный поршень 18 под действием пружин 17 и 27 устанавливаются в исходноеположение и деталь отделяется от схвата. Далее цикл пов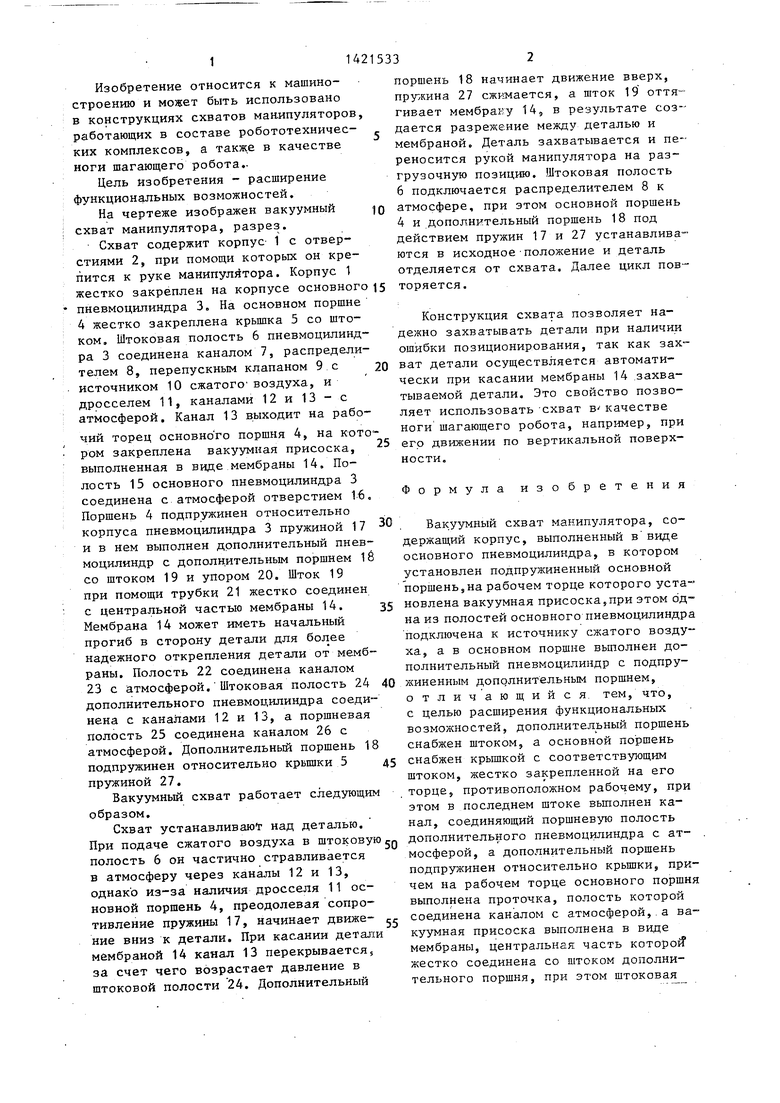
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| Шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности | 1989 |
|
SU1782849A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Захват манипулятора | 1988 |
|
SU1794644A1 |
) Изобретение относится к области машиностроения и может быть использовано в конструкциях схватов манипуляторов, а также в качестве ноги шагающего робота. Целью изобретения является расширение функциональных возможностей. Для этого на основном поршне 4 основного пневмоцилиндра 3 установлена крышка 5 со штоком. В основном поршне 4 выполнен дополнительный пневмоцилиндр с подпружиненным дополнительным поршнем 18 со штоком 19. Шток 19 соединен с центральной частью мембраны 14. При подаче давления в полость 6 воздух частично стравливается в атмосферу через каналы 12,13 и дроссель 11. Основной поршень 4, сжимая пружину 1-7, движется вниз до касания детали мембраной 14. Канал 13 перекрывается. Давление в штоковой полости 24 повьшгается. Дополнительный поршень 18 поднимается, сжимая пружину 27. Шток 19 оттягивает мембрану 14. Между деталью и мембраной 14 создается разрежение. Деталь захватывается и переносится рукой манипулятора, t ил. с
жестко закреплен на корпусе основного пневмоцилиндра 3. На основном поршне 4 жестко закреплена крьш1ка 5 со штоком. Штоковая полость 6 пневмоцилиндра 3 соединена каналом 7, распределителем 8, перепускным клапаном 9с источником 10 сжатого воздуха, и дросселем 11, каналами 12 и 13 - с атмосферой. Канал 13 выходит на рабочий торец основно го поршня 4, на кото ром закреплена вакуумная присоска, выполненная в виде мембраны 14. Полость 15 основного пневмоцилиндра 3 соединена с атмосферой отверстием 16. Поршень 4 подпружинен относительно корпуса пневмоцилиндра 3 пружиной 17 и в нем выполнен дополнительный пнев- моцилиндр с дополн.ительным поршнем 16 со штоком 19 и упором 20. Шток 19 при помощи трубки 21 жестко соединен с центральной частью мембраны 14. Мембрана 14 может иметь начальный прогиб в сторону детали для более надежного открепления детали от мембраны. Полость 22 соединена каналом 23 с атмосферой. Штоковая полость 24 дополнительного пневмоцилиндра соединена с каналами 12 и 13, а поршневая полость 25 соединена каналом 26 с атмосферой. Дополнительный поршень 18 подпружинен относительно крьш1ки 5 пружиной 27.
Вакуумный схват работает следующим образом.
Схват устанавливают над деталью. При подаче сжатого воздуха в штоковую полость 6 он частично стравливается в атмосферу через каналы 12 и 13, однако из-за наличия дросселя 11 основной поршень 4, преодолевая сопро
тивление пружины 17, начинает движе- гг соединена каналом с атмосферой, а вание вниз к детали. При касании детали мембраной 14 канал 13 перекрывается, за счет чего возрастает давление в штоковой полости 24. Дополнительный
куумная присоска выполнена в виде мембраны, центральная часть которой жестко соединена со EITOKOM дополнительного поршня, при этом штоковая
торяется.
Конструкция схвата позволяет надежно захватывать детали при наличии ошибки позиционирования, так как захват детали осуществляется автоматически при касании мембраны 14 захватываемой детали. Это свойство позволяет использовать -схват в качестве ноги шагающего робота, например, при его движении по вертикальной поверхности.
Формула изобретения
Вакуумный схват манипулятора, содержащий корпус, выполненный в виде основного пневмоцилиндра, в котором установлен подпружиненный основной поршень5на рабочем торце которого установлена вакуумная присоска,при этом одна из полостей основного пневмоцилиндра подключена к источнику сжатого воздуха, а в основном поршне выполнен дополнительный пневмоцилиндр с подпружиненным дополнительным поршнем, о тлич ающий ся. тем, что, с целью расширения функциональных возможностей, дополнительный поршень снабжен штоком, а основной поршень снабжен крышкой с соответствующим штоком, жестко закрепленной на его торце, противоположном рабочему, при этом в последнем штоке вьшолнен канал, соединяющий поршневую полость дополнительного пневмоцилиндра с ат- . мосферой, а дополнительный поршень подпружинен относительно крьштки, причем на рабочем торце основного поршня выполнена проточка, полость которой
куумная присоска выполнена в виде мембраны, центральная часть которой жестко соединена со EITOKOM дополнительного поршня, при этом штоковая
31421533
полость дополнительного пневмоцилинд-- линдра, а каналом, выходящим на рабо- ра подключена каналом с дросселем к чий торец основного поршня, соединена штоковой полости ОСНОВНОГО пневмоци- с атмосферой.
| Схват | 1983 |
|
SU1161378A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
