(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СХВАТОМ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления схватом манипулятора | 1978 |
|
SU785842A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления роботом технологического конвейера | 1980 |
|
SU1096609A1 |
| Устройство для управления схватом манипулятора | 1984 |
|
SU1193635A1 |
| Устройство для управления копирующим манипулятором | 1985 |
|
SU1262447A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
| Устройство управления усилием схвата манипулятора | 1985 |
|
SU1266733A1 |
1
Изобретение относится к области манипуляторостроения и может быть использовано при создании очувствлеиных манипуляторов.
Известны устройства для управления схватом манипулятора, содержащие перчатку оператора, выполненную в виде надувной камеры, канал управления положением схвата, исполнительного органа и канал отражения нагрузки на перчатку оператора 1.
Однако такое устройство не ограничивает прикладываемое усилие сжатия и не предохраняет предмет от опрокидьшания.
Наиболее близким к предлагаемому является устройство, содержащее последовательно соединенные датчик положения задающего органа, блок передачи и запоминания управляющего сигнала, первый сумматор и привод исполнительного органа, связанный через исполнительный механизм с датчиком положения исполнительного органа, выход которого подключен ко второму входу первого сумматора и к первому входу второго сумматора, вторым входом соединенного с выходом датчика положения задающего органа, а выходом - со входом привода подачи воздуха, и входы первого и второго порогового элемента пощслючены к выходу соответствующих датчиков усилия сжатия, установлешп 1х на охвате исполнительного орга5 на, а вход первого элемента индикации соединен со вторым входом блока передачи и запоминания управляющего сигнала 2.
Это устройство ограничивает прикладываемое к объекту усилие сжатия, но не фикси рует -момент касания объекта губками схвата исполнительного органа и тем самым не предохраняет объект от опрокидывания.
Цель изобретения - распшрение функциональных возможностей устройства;
15
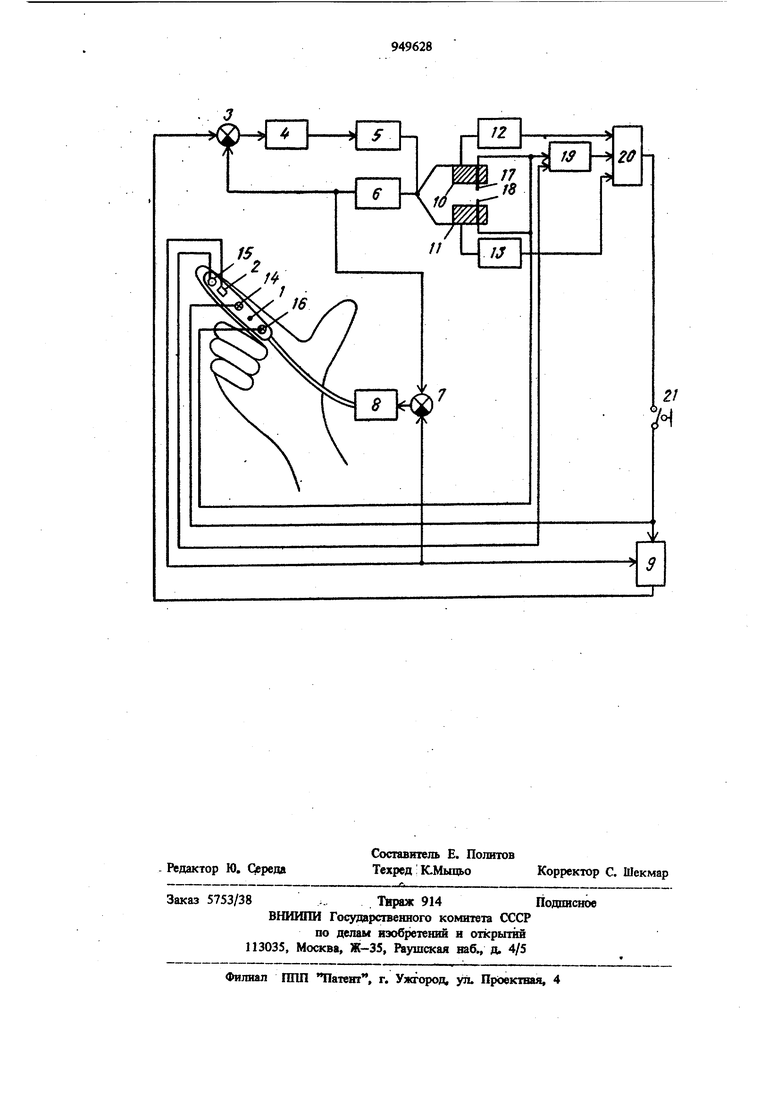
Указанная цель достигается за счет того, что устротство содержит установленные на схвате исполнительного органа первый и второй тактильные датчики, второй и третий элементы индикации и последовательно
20 соединенные элемент неравнозначности, элемент ИЛИ и ключ, выход которого подключен к первому входу блока передачи и запоминания управляющего сигнала, выхо ды первого и второго тактильного датчика соединены соответственно со входом второго и третьего элемента индикации и соответствующими входами элемента неравнозначности, а входы первого и второго пороговых элементов подключены соответственно ко второму и третьему входам элемента ИЛИ. На чертеже представлена функциональная схема предлагаемого устройства. Устройство содержит перчатку 1 оператора,, датчик 2 положения эадающего органа, первый сумматор 3, привод 4 исполнительного органа, исполнительный механизм 5, дат чик 6 положения исполнительного органа, второй сумматор 7, привод 8 подачи воздуха, блок 9 передачи и запоминания управляющего сигнала, первый и второй датчики 10 и 11 усилия соответственно, первый и второй пороговые элементы 12 и 13 соответственно, первый, второй и третий элементы 14-16 ийдикации соответственно, первый и второй так тильные датчики 17 и 18 соответственно, эле мент 19 неравнозначности, элемент ИЛИ 20, ключ 21, Устройство управления схватом манипулято ра работает следующим образом. Оператор при помощи перчатки 1 оператора задает перемещение губок схвата кинематически не подобных исполнительному механизму S. С датчика 2 положения задающего органа снимают сигналы пропорциональные этим перемеще1шям и подают на вход блока 9 передачи и запоминания управляющего сигн ла. Если происходит касание объекта одной из губок схвата, срабатывает тактильный датчик 17 или 18, на выходе элемента 19 неравнозначности появляется логическая единица, на рыходе элемента ИЛИ 20 - логическая единица, блок 9 передачи и запоминания управляющего сигнала переходит в режим запоминания и элементы индикации первый 14 и второй 15 или третий 16 индицируют переход блока 9 передачи и запоминания управляющего сигнала в режим запоминания. Если губки схвата не касаются объекта или происходит одновременное касание, на выходе элемента ИЛИ 20 -- логический ноль, блок 9 передачи и запоминания управляющег сигнала работает в режиме передачи, причем во втором случае индицируются второй 15 и третий 16 элементы тищкящт. При этом происходит выборка сигнала с датчика 2 положения задающего органа и подача его на первый вход первого сумматора 3, привод 4, исполнительный механизм 5. По сигналу датчика 6 положения исполнительного органа и с помощью привода 8 подачи воздуха производится изменение давления возду ха в надувной камере перчатки 1 оператора. При достижении заданного усилия сжатия на датчиках 10 и 11 усилия на выходах пороговых элементов 12 и 13 появляются логические единицы, на выходе элемента ИЛИ 20 появляется логическая единица и блок 9 передачи и запоминания управляющего сигнала переходит в режим запоминания, индицируются все три элемента 14-16 индикации. Ключом 21 принудительно переводят блок 9 передачи и запоминания управляющего сигнала в режим передачи. Применение предлагаемого изобретения позволит значительно расширить функциональные возможности устройства, а также исключить возможность смещения и опрокидывания объекта, сократить специальную подготовку и тренировку оператора. Формула изобретения Устройство для управления схватом манипулятора, содержащее последовательно соединенные датчик положения задающего органа, блоки передачи и запоминания управляющего сигнала, первый сумматор и привод исполнитель- , ного органа, связанный через исполнительный механизм с датчиком положения исполнительного органа, выход которого подключен ко второму входу первого сумматора и к первому входу второго сумматора, вторым входом соединенного с выходом датчика положения задающего органа, а выходом - со входом привода подачи воздуха, входь первого и второго порогового элемента подключены к выходу соответствующих датчиков усилия сжатия, установленных на схвате исполнительного органа, а вход первого элемента индикации соединен со вторым входом блока передачи и запоминания управляющего сигнала, отличающееся тем, что, с целью расщирения функциональных возможностей устройства, оно содержит установленные на схвате исполнительного органа первый и второй тактильные датчики, второй и третий элементы индикации и последовательно соединенные элемент неравнозначности, элемент ИЛИ и ключ, выход которого подключен к первому входу блока передачи и запоминания управляющего сигнала, выходы первого и второго тактильного датчика соединены соответственно со входами второго и третьего элемента индикации и соответствующими входами элемента неравнозначности, а входы первого и второго пороговых элементов подключены соответственно ко второму и третьему входам элемента ИЛИ. Источники информации, принятые во внимание при экспертизе 1. Патент США N«3263824, кл. 214-1, опублик. 1966. 2. Авторское свидетельство СССР № 785842, кл. В 25 J 13/00, 1978 (прототип).
