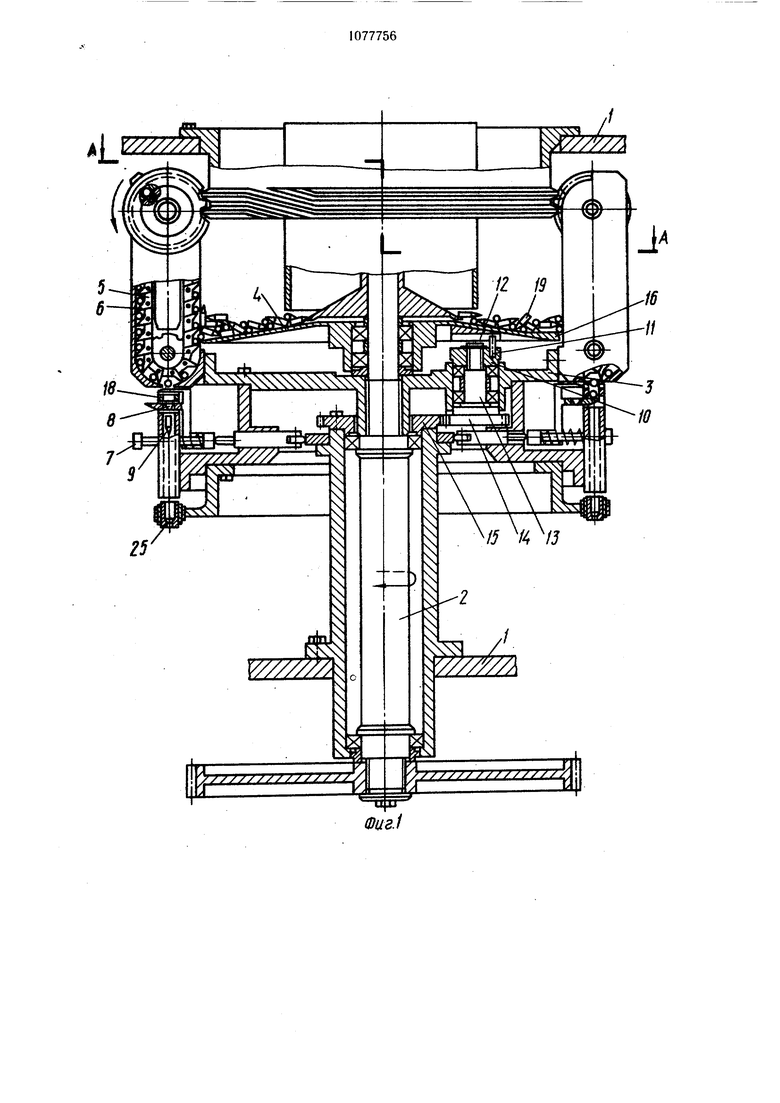
ел
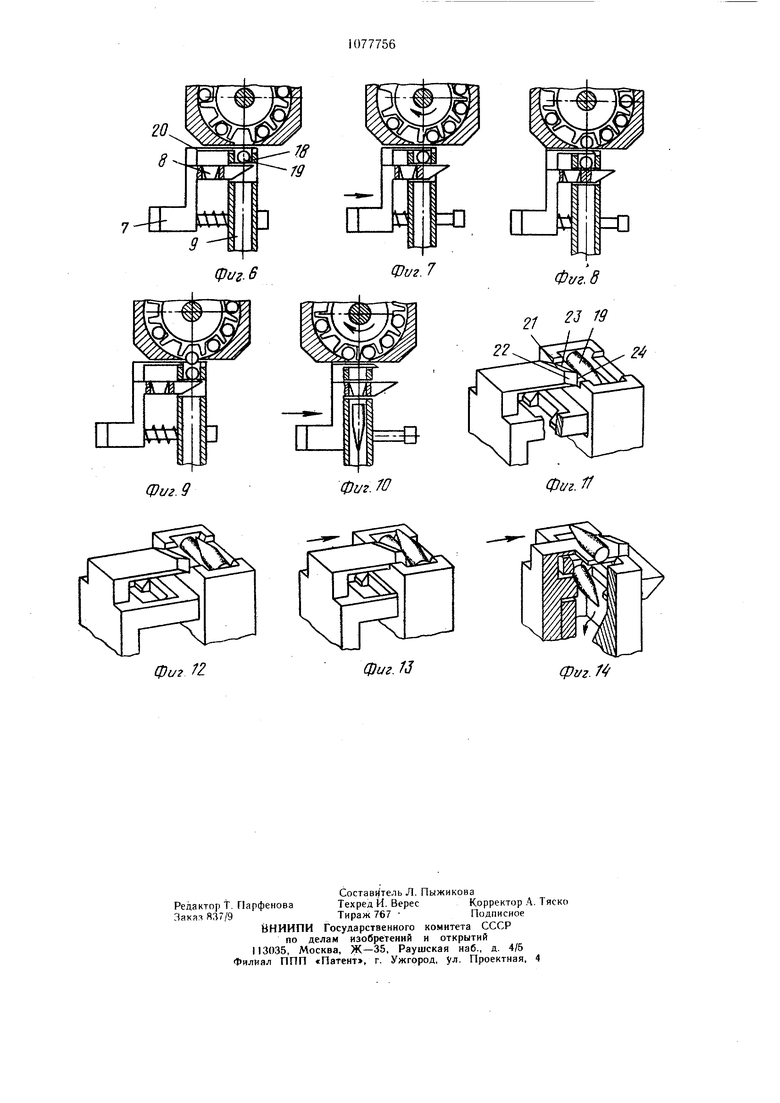
О) ИГзобретение относится к станкостроению, а более конкретно к устройствам автоматической загрузки технологических ма-. шин штучными изделиями типа тел вращения, например в виде цилиндрических и конических роликов как сплошных в сечении, так и полых. По основному авт. св. f 1042951 известен роторный автомат питания, содержаш,ий установленный на станине вал, на котором смонтированы бункер и равномерно расположенные по окружности рабочие органы с захватами и Приводом их перемещения, механизмы 1 вторичной ориентации, выполненные в виде установленных между рабочими органами и приемниками с возможностью возвратно-поступательного перемещения в радиальном направлении подпружиненных ползунов с ориентаторами, при этом каждый рабочий орган выполнен в виде расположенного параллельно ва-. лу вертикально-замкнутого элеватора 20 с нечетным числом захатов, кинематически связанного с приводом механизма вторичной ориентации посредством дополнительно размещенного на станине соосно валу колеса с прерывистыми винтовыми выступауи, имеющими горизонтальные и восходящне наклонные участки, причем каждый элеватор снабжен предохранительным механизмом . Известный роторный )Втомат обеспечивает пои1тучную ориенти{) надежную выдачу изделий типа ,„ цнлиндрических и конических роликов сплошнйго сечения 1. Однако известный роторный автомат не надежен при выдаче полых конических изделий, так как полые изделия конической формы, входя одно в другое, мешают друг 35 другу западать в захваты блока первичной ориентации. Цель изобретения - повышение иадежности работы yctpoйctвa. ., Поставленная цель достигается тем. нуо 40 роторныи автомат питания снабжен жестко закрепленными на подпружиненных ползунах разделителями, приводом колебательного вращения конического дна в горизонтальнои плоскости. Кинематически связанного с валом ротора, и ворошителя, при « этом разделители выполнены в виде двухгранного симметричного клина, образован ного наклонными пересекающимися поверхносгями с острыми кромками в нижней го-, ризонтальной плоскости )acnoflo eHHHMH ; вад подпружиненными ползунами парал лельно последнему, а ворошители выполнены в виде неправильных треугольных пирамид, две грани каждой из которых сопряжены с поверхностью конического дна пс радиусу, одиа .совмещена с поверхностью 55 конического дна. и основание обращено к захватам элеватора н образует с вертикальной плоскостью захватов острый угол На фиг. 1 изображен роторный автомат питания, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел 1 на фиг. 2 (выносной элемент); на фиг. 4 - разрез -Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 3; на фиг. 6-10 - последовательные положения, занимаемые элеватором и пластиной-разделителем с ползуном относительно гнезда-приемника; на фиг. 1 -14 последовательные положения, занимаемые ползуном и пластиной-разделителем отиосительно гнезда-приемника, в аксонометрии. Роторный автомат питания содержит станину 1, вал 2, на котором смонтированы корпус бункера 3, коническое дно 4 и равномерно расположенные по окружности блоки первичной ориентации, выполненные в виде элеваторов 5 с захватами 6, с возможностью прерывистого перемещения, и расположенные под ними блоки вторичной ориентации, включающие подпружиненные ползуны 7 с ориентаторами 8 и каналы выдачи 9. Коническое дно 4 кинематически связано с валом 2 посредством привода, сообщающего дну колебательные вращения в горизонтальной плоскости и включаюш.его жестко закрепленный на диске 10 палец 11, входящий в паз 12, выполненный в коническом дне 4, при этом диск 10 установлен на оси 13, на которую насажена шестерня 14, контактирующая с шестерней 15, закрепленной на станине I соосно валу 2. На поверхности конического дна 4 радиально и равномерно по периферии и между блоками первичной ориентации расположены выступы-ворошители . 16, выполненные в виде неправильных треугольных пирамид. одна грань которых совмещена с поверхностью конического дна 4, а основание ее обращено к захватам элеватора и образует с вертикальной плоскостью последних острый уголоС. Причем ребро основания 17 совмещено с кромкой конического дна 4, а „ежду блоками первичной и вторичной ори соосно им дополнительно введены неподвижное гнездо-приемник 18 на ддно изделие 19, и размещенный над ним и жестко закрепленный на ползуне 7 разде 20 Г-образной формы, рабочая позер ность которого обращена к блокам первичной ориентации и выполнена в виде двухrpaHHOfo симметричного клина, образованного наклонными пересекающимися поверхностями 21 и 22 с острыми кромками 23 -- ., горизонтальной плоскости. Под каналами выдачи 9 расположена транспортнаяцепь с гнездами 25, в которые поштучно выдаются сориентированные, вдоль своей вертикальной оси изделия 19. Роторный автомат пита11ия работаетследующим образом. В процессе транспортного вращения приводного вала 2- относительно станины 1 коническое дно 4 и корпус бункера 3 также получают вращения, в результате которых насыпанные навалом изделия 19 по коническому дну 4 поступают в периферийную зону бункера 3 к захва там 6 элеваторов 5. Привод колебательного вращения конического дна кинематически связан с валом 2 и сообщает прерывистые перемещение в вертикальной плоскости-не менее, чем на 2 шага за один оборот ротора. Второе перемещение делается с целью повыщения надежности питания при возможных пропусках западания изделий 19 в захватах б элеваторов 5. Однако полые конические изделия, входя одно в другое, мешают друг другу западать в захваты элеватора. В процессе вращения колебательг г ного дна 4 с выступами-ворощителями 16 относительно корпуса бункера 3 происходит отделение одного изделия от другого, что способствует более-надежному заполнению захватов 6 элеватора 5 изделиями 19. При этом подпружиненные ползуны 7 соверщают радиальные возвратно-поступательные перемещения, за один максимальный ход которых происходит перемещение элеваторов 5 не менее, чем на два шага и совмещение при этом захватов элеватора с гнездом-приемником 18 и перекладка изделия
в последнее, при этом подпружиненный ползун занимает положение, показанное на фиг. 6 и 11. В исходном положении гнездоприемник 18, совмещенное с каналом выдася.
Применение изобретения позволяет повысить надежность работы основного роторного автомата питания. чи 9, отдельно от последнего горизонтальной полкой подпружиненного ползуна 7 и открыто со стороны захватов элеватора 5, при этом изделие 19 из элеватора 5 перекладывается в гнездо-приемник 18 (фиг. 6 и II). Далее подпружиненный ползун перемещается вправо до перекрытия гнезда-приемника 18 разделителем 20, после чего элеватор 5 перемещается на один шаг, т.е. на один захват (фиг. 6 - И). Затем подпружиненный ползун 7 возвращается в исходное положение для открытия гнездаприемника 18 и передачи в него изделия (в случае отсутствия изделия в гнездеприемнике 18, поскольку на предыдущей позиции его в элеваторе могло и не оказаться Затем подпружиненный ползун 7 перемещается в крайнее правое положение до совмещения его гнезда-ориентатора 8 с каналом выдачи 9 и гнездом-приемником 18, одновременно разделитель 20 отделяет второе изделие 19, если оно запало в гнездо-приемник 18, и перемещает его в захват 6 элеватора 5, из которого оно было выдано, а первое изделие, пройдя через ориентатор 8, ориентируется вдоль своей оси и по каналу выдачи выдается в гнездо 25 транспортной цепи. Далее цикл повторяет/i lj /7/7/Щ
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Роторный автомат питания | 1983 |
|
SU1191255A2 |
| Загрузочный ротор | 1989 |
|
SU1671441A1 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Роторный автомат питания | 1979 |
|
SU870063A1 |
| Загрузочный ротор | 1989 |
|
SU1673382A2 |
| Роторное питающее устройство | 1985 |
|
SU1266706A1 |
| Автомат питания для поштучной выдачи изделий | 1980 |
|
SU897468A2 |
| Роторный автомат питания | 1978 |
|
SU779010A1 |
| Загрузочный ротор | 1990 |
|
SU1745508A1 |

РОТОРНЫЙ АВТОМАТ ПИТАНИЯ по авт. св.№ 1042951, отличающийся тем, что, с целью повышения надежности работы автомата, он снабжен жестко закрепленнымн на подпружиненных ползунах разделителями, приводом колебательного вращения конического дна в горизонтальной плоскости, кинематически связанного с валом ротора, и ворошителями, при этом разделители выполнены в виде двухгранного симметричного клина, образованного наклонными пересекающимися поверхностями с острыми кромками в нижней горизонтальной плоскости и расположенными над подпружиненными ползунами параллельно последним, а ворошители в виде неправильных треугольных пирамид, две грани каждой из которых сопряжены с поверхностью конического дна по радиусу, одна совмещена с поверхностью коничес ого дна, и основание обращено к захватам элеватора и образует с вертикальной плоскостью захватов острый угол. с S
Л
ФигЗ
±L
1
Фиг.5
Фиг4
(р1/г.6
Фиг. 9
Фш.Фиг. 70
фиг J2.
| I | |||
| Роторный автомат питания | 1982 |
|
SU1042951A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
