Изобретение относится к обкатке деталей и может быть использовано для обкатки беговой дорожки оси велопедали.
Известен способ обкатки беговой дорожки оси велопедали, включающий предварительную ориентацию оси, ее центрирование и ввод в шариковый обкатник, подачу оси в рабочую зону обкатки, обкатывание беговой дорожки и съем оси.
Известно устройство - роторно-конвей- ерная линия для обработки деталей давлением, включающая корпус, привод, ориентирующее, подающее устройство, а также технологический ротор с установленными на нем звездочками и рабоче-транспортную цепь с вмонтированными в ней де- форм ирующпми инструментами, кинематически связанную со звездочками технологического ротора.
Недостаток известного способа заключается в том, что ввод оси в обкатник осуществляется в один этап, что возможно только при центрировании оси по цилиндрическим поверхностям расположенным выше беговой дорожки, Действующая технология изготовления оси допускает наличие некоторой эксцентричности цилиндрических поверхностей, расположенных выше и ниже беговой дорожки, поэтому при существующем способе обкатки при центрировании оси необходимы дополнительные манипуляции (качательные и вращательные движения) с осью велопедали для обеспечения полного западания оси в обкатник. В существующем способе обкатки отсутству- ет центрирование оси в ее нижней части, что допускает возможность перекоса последней непосредственно в процессе обкатки, и, как следствие этого, отклонение от перпендикулярности между продольной и поперечной осями симметрии беговой дорожки. При этом ухудшается качество накатанной беговой дорожки.
Недостатком известного способа и устройства является также его невысокая производительность, ограниченная ручными операциями центрирования, ввода в рабочую зону и съема осей, поскольку известное устройство не предназначено для обкатки беговой дорожки оси велопедали.
Целью изобретения является повышение производительности и качества накатанной беговой дорожки.
Поставленная цель достигается тем. что в способе обкатки беговой дорожки оси велопедали, включающем предварительную ориентацию оси, ее центрирование и ввод в шариковый обкатник, подачу оси в зону обкатки, обкатывание беговой дорожки и съем оси, согласно изобретению, обкатка оси осуществляется с одновременным ее центрированным по одной из нерабочих цилиндрических поверхностей, расположенных ниже беговой дорожки, а ввод оси в шариковый обкатник производят в два этапа, причем на первом этапе предварительное центрирование оси осуществляют по цилиндрической поверхности, являющейся продолжением поверхности беговой дорожки.
Способ реализуется в роторно-конвей- ерной линии, содержащей корпус, привод. ориентирующее, подающее устройство, а также технологический ротор с установленными на нем звездочками и рабоче-транс- портную цепь с вмонтированными в ней
деформирующими инструментами, кинематически связанную со звездочками технологического ротора, согласно изобретению линия снабжена дополнительными роторами предварительной и окончательной вставки оси, причем последние расположены между технологическим ротором и подающим устройством и кинематически связаны с рабоче-транспортной цепью, ротор пред0 верительной вставки выполнен с храповым колесом, связанным с подающим устройством, а деформирующий инструмент выполнен в виде шарикового обкатника с дополнительным центрирующим пояском.
5 Кроме того, ротор окончательной вставки оси выподнен в виде смонтированной с возможностью горизонтального перемещения оси с закрепленным на ней в подшипниках барабаном с продольными
0 пазами и расположенными в последних с возможностью возвратно-поступательного перемещения в вертикальной плоскости ползунами с жестко закрепленными на них пальцами.
5А ротор предварительной вставки оси
выполнен в виде двух жестко насаженных на вал барабанов с расположенными на их периферии верхними и нижними ползунами, подпружиненных стержней и клещевых
0 захватов, причем стержни жестко закреплены между верхними и нижними ползунами, а клещевые захваты установлены на нижних ползунах с возможностью возвратно-поступательного перемещения в вертикальной
5 плоскости.
Именно введение в линию дополнительных роторов предварительной и окончательной вставки оси и конструктивное исполнение шарикового обкатника с допол0 нительным центрирующим пояском обеспечивает, согласно способу, центрирование оси в ее нижней части одновременно с обкаткой и тем самым достижение цели изобретения. Это позволяет сделать вывод, что
5 заявляемые изобретения связаны между собой единым изобретательским замыслом.
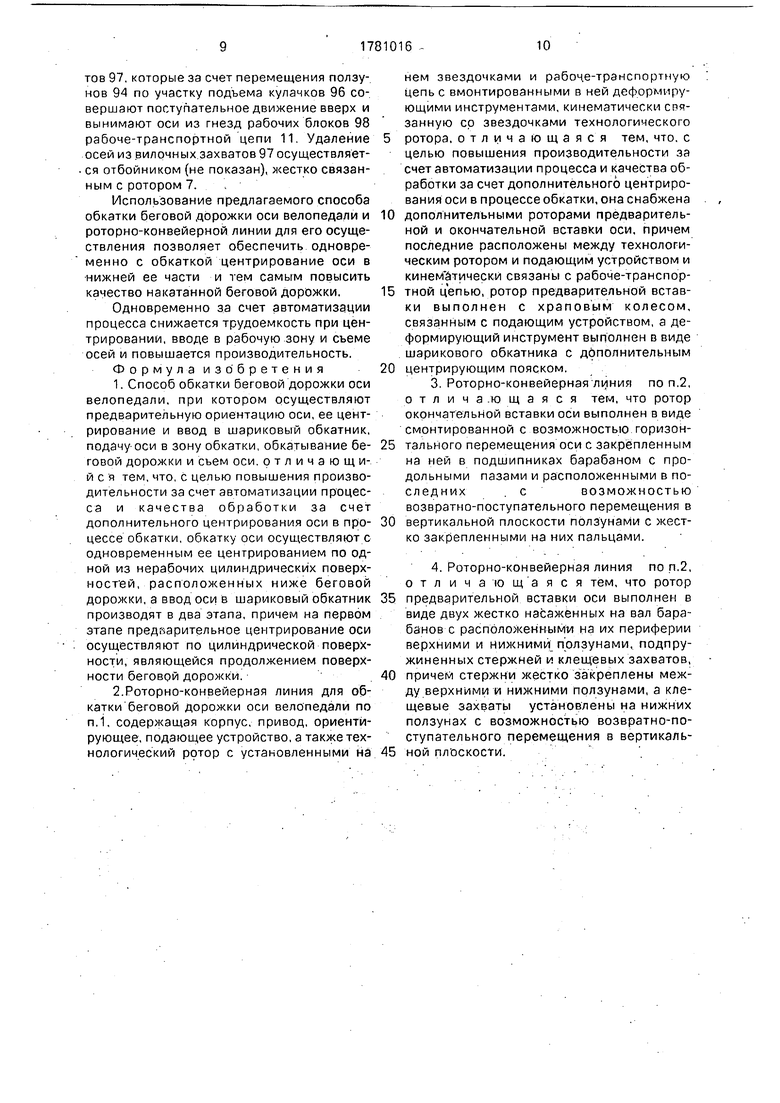
На фиг.1 показана предварительная ориентация оси; на фиг.2 - центрирование оси по цилиндрической поверхности, распо0 ложенной ниже беговой дорожки; на фиг.З - предварительный ввод оси в шариковый обкатник с одновременным центрированием оси по одной из цилиндрических нерабочих поверхностей; на фиг.4 - окончательный
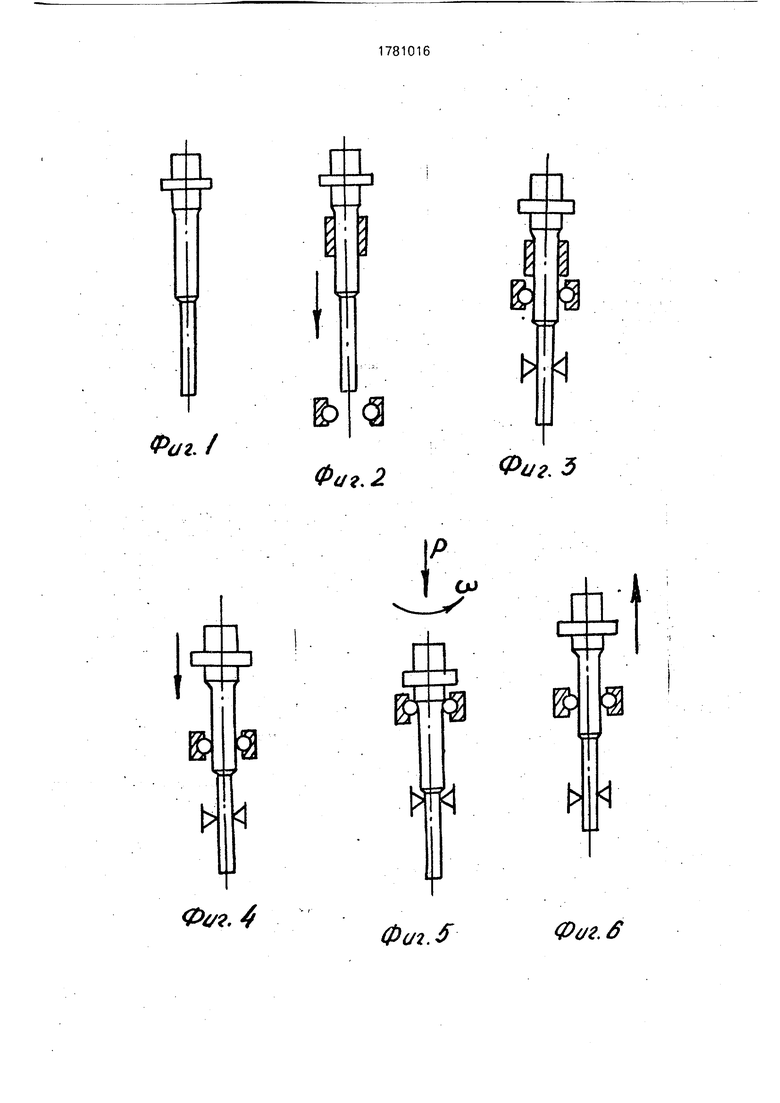
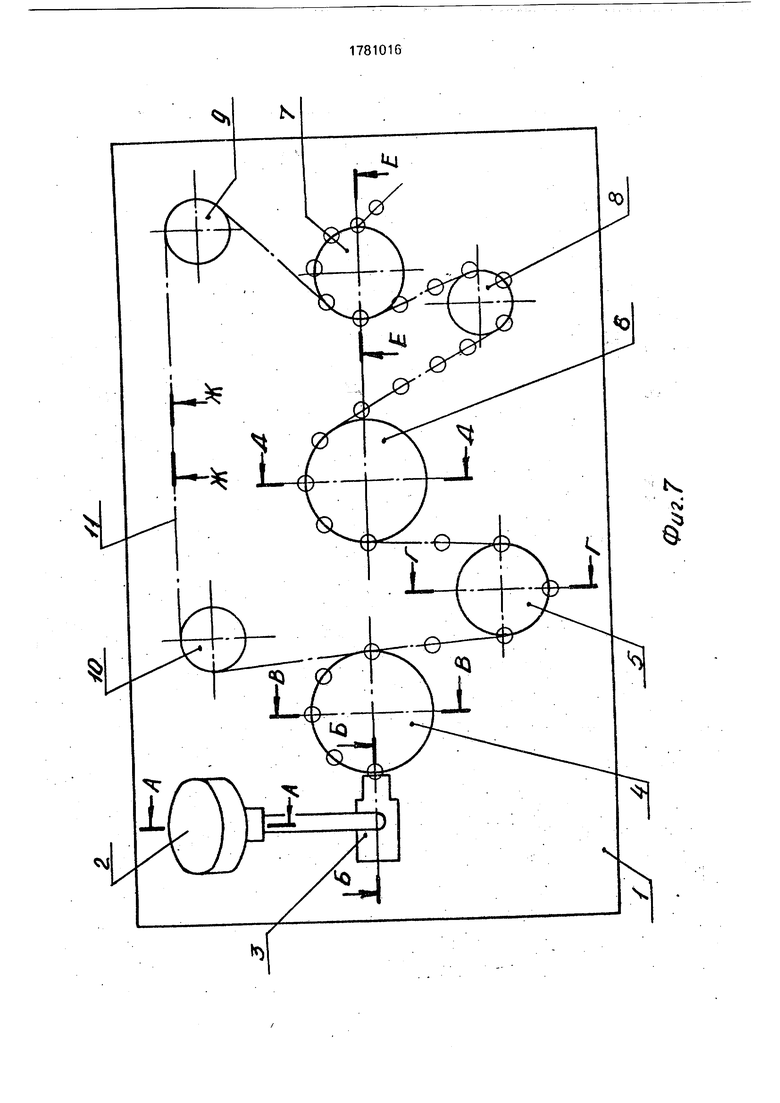
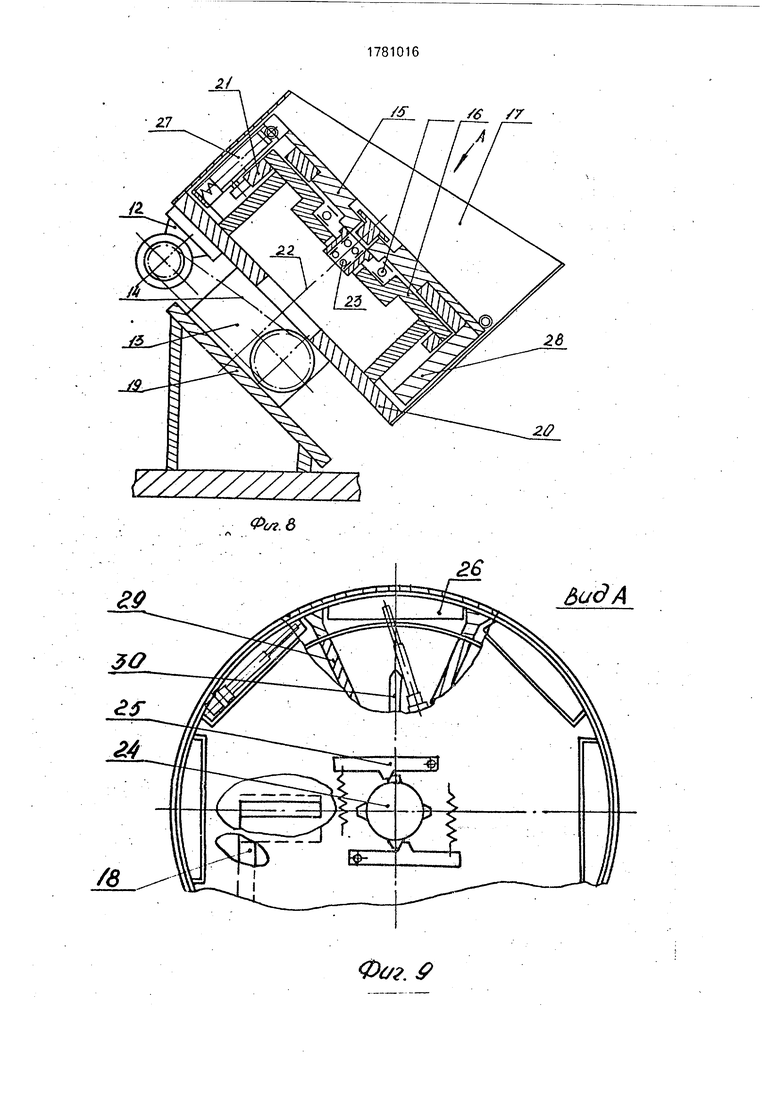
5 ввод оси в обкатник; на фиг.5 - обкатка оси; на фиг.6 - съем оси; на фиг.7 - схема ротор- но-конвейерной линии (план); на фиг.8 - ориентирующее устройство (разрез по А-А на фиг.7); на фиг.9 - вид А на фиг.З; на фиг. 10 - подающее устройство (разрез по Б-Б на
фиг.7): на фиг.11 - разрез по А-А на фиг.10; на фиг. 12 - ротор предварительной вставки оси (разрез по В-В на фиг.7); на фиг.13 - ротор окончательной вставки оси (разрез по Г-Г на фиг.7); на фиг.14 - ротор обкатку (разрез по Д-Д на фиг.7); на фиг. 15 - ротор съема (разрез по Е-Е на фиг.7); на фиг.16 - рабоче-транспортная цепь (разрез по Ж-Ж на фиг.7).
Линия содержит станину 1, установленные на ней в технологической последовательности ориентирующее устройство 2, подающее устройство 3, ротор 4 предварительной вставки оси, ротор 5 окончательной вставки оси, ротор 6 обкатки, ротор 7 съема, натяжные звездочки 8,9,10, привод (на плане не показан), огибающую роторы замкнутую рабоче-транспортную цепь 11.
Ориентирующее устройство 2, предназначенное для выдачи осей в ориентированном виде, содержит привод, состоящий из электродвигателя 12 и редуктора 13, соединенных цепной передачей 14, диск 15, нижний диск 16, чашу бункера 17, ориентатор 18. Редуктор 13 установлен на наклонной плите 19, а электродвигатель 12 - на диске 20, неподвижно закрепленном на редукторе 13. С диском 20 неподвижно соединены нижний диск 16 и чаша бункера 17. К нижнему диску 16 неподвижно прикреплен торцевой кулачок 21 и ориентатор 18. На выходном валу 22 редуктора 13 на подшипниках 23 установлен подвижный диск 15 и жестко насажен зубчатый диск 24 По периметру диска 15 равномерно расположены окна прямоугольной формы, соответствующие наружному очертанию обрабатываемых осей. На диске 15 закреплены подпружиненные собачки 25 с возможно; стью их взаимодействия с зубчатым диском 24. Дном окон служат планки 26, закрепленные на подпружиненных ползунах 27, которые размещены с возможностью возвратно-поступательного движения в барабане 28, неподвижно соединенном с диском 15. К диску 15 по краям окон равномерно прикреплены неподвижные ра- диально расположенные длинные планки 29, а посередине между ними - короткие планки 30, расположенные напротив центров окон.
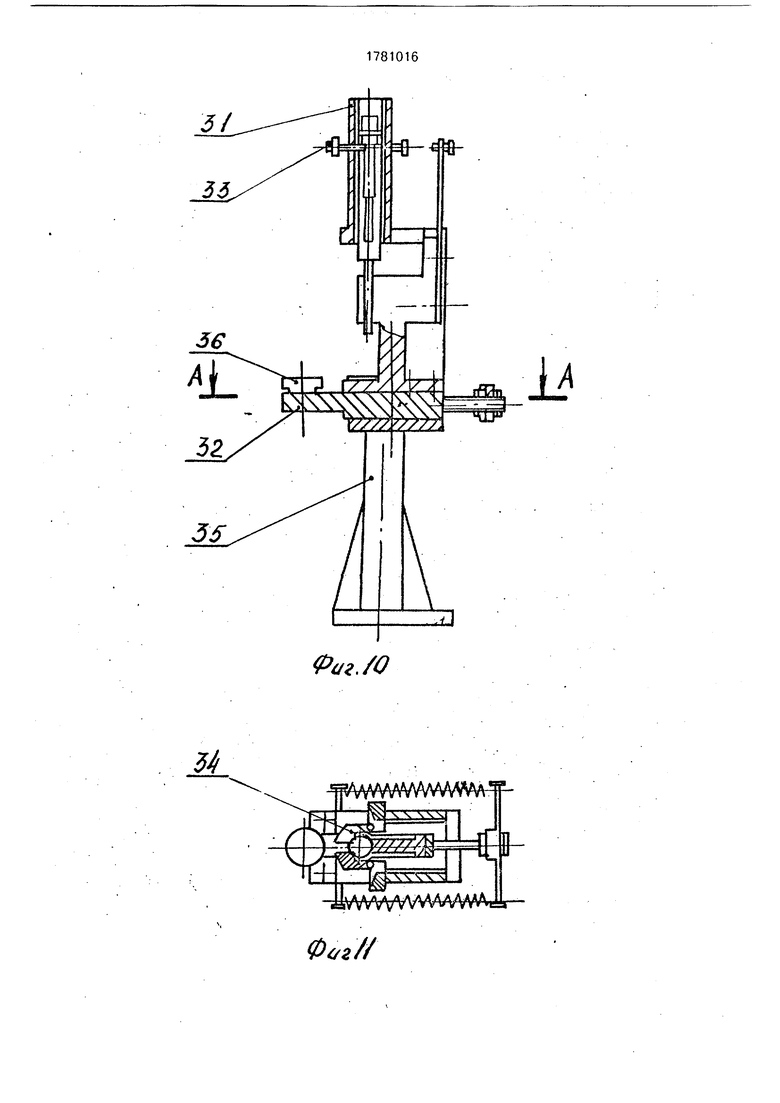
Подающее устройство 3 содержит направляющую трубку 31, шибер 32, фиксатор 33, захватные губки 34 Устройство установлено на тумбе 35, закрепленной на станине 1. На подвижном шибере 32 закреплен ролик 36.
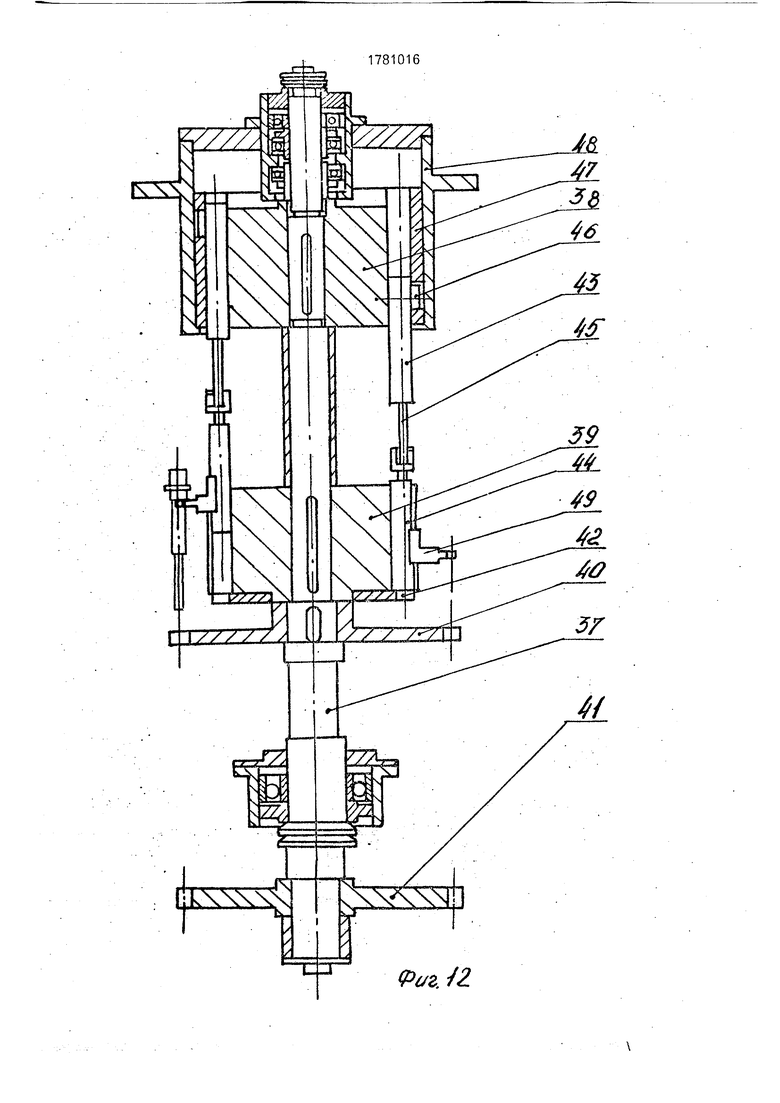
Ротор 4 предварительной вставки оси содержит вал 37, на который жестко насажены барабаны 38 и 39, звездочка 40, приводная шестерня 41, храповое колесо 42 По периферии барабана 38 расположены ползуны 43, по периферии барабана 39 - ползуны 44 Ползуны 43 и 44 связаны между собой
подпружиненными стержнями 45. Ползуны 43 снабжены консольными роликами 46 с возможностью их обкатки по пазовому кулачку 47, неподвижно закрепленному в верхнем стакане 48 ротора 4. На ползунах 41
0 установлен клещевые захваты 49.
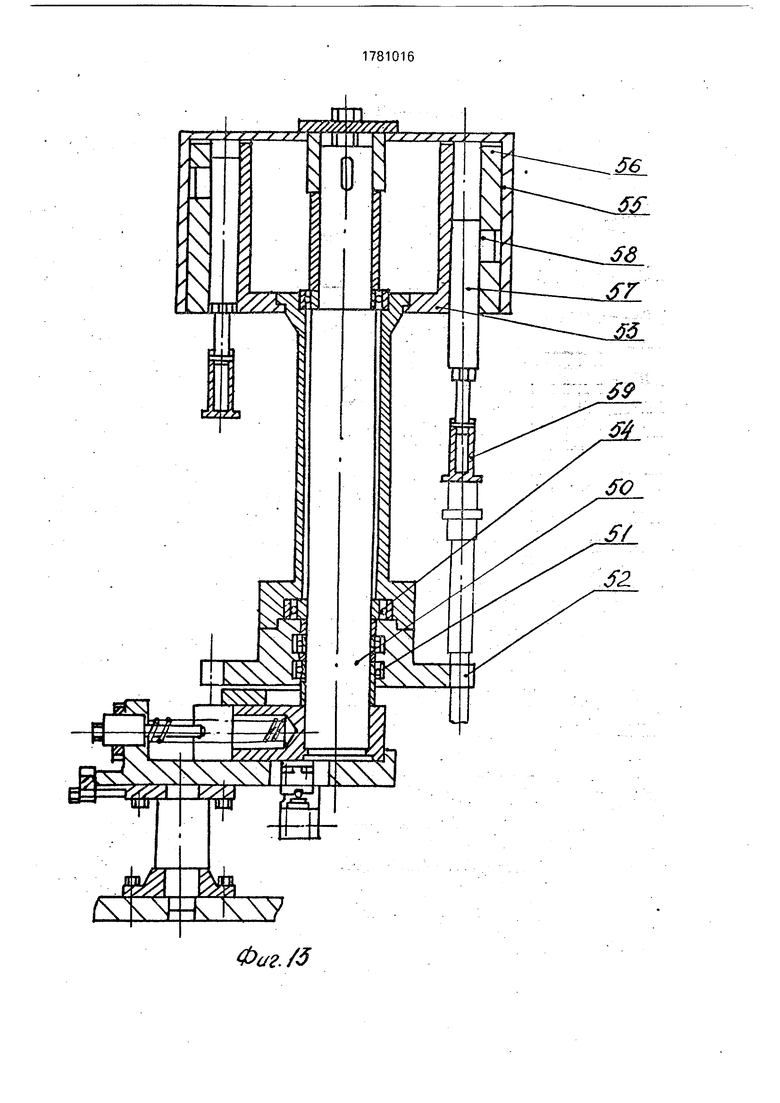
Ротор 5 окончательной вставки содержит смонтированную с возможностью горизонтального перемещения ось 50, на которой закреплена на подшипниках 51
5 звездочка 52 и барабан 53 - на подшипниках 54, На верхнем конце оси 50 неподвижно установлен стакан 55, в котором закреплен неподвижно пазовый кулачок 56. В пазах барабана 53 размещены ползуны 57
0 с возможностью возвратно-поступательного движения в вертикальном направлении. На ползунах 57 жестко укреплены ролики 58 и пальцы 59,
Ротор 6 обкатки содержит вал 60, уста5 новленный в подшипниковых уЗлэх 61 и 62 на станине 1. На валу 60 жестко закреплен барабан 63, звездочка 64, опорный диск 65, приводное зубчатое колесо 66. К барабану 63 жестко прикреплен барабан 67. В пазах
0 барабана 67 размещены ползуны 68, снабженные консольными роликами 69 и торцевыми роликами 70 с возможностью возвратно-поступательного движения, а в пазах барабана 63 соосно с ползунами 68
5 размещены с возможностью возвратно-поступательного и вращательного движения инструментальные блоки 71 с неподвижно закрепленным инструментом 72. Ползуны 68 снабжены регулируемыми упорами 73 с
0 целью передачи возвратно-поступательного движения инструментальным блокам 71. Для передачи инструментальным блокам 71 вращательного движения отдельным электродвигателем (не показан) посредством кли5 ноременной передачи 74 в неподвижном стакане 75 в подшипниковых опорах 76 установлен вал 77 с зубчатым колесом 78, зубчатые колеса 79 и 80, неподвижно закрепленные на стакане 81, установлен0 ном на валу 60 в подшипниковых узлах 82 и 83. Для обеспечения возвратно-поступательного движения ползунам 68 в стакане 75 неподвижно закреплен пазовый кулачок 84 с возможностью перемещения по не.му
5 консольных роликов 69 и копир 85, установленный на вращающейся скобе 86 с возможностью взаимодействия с ним торцевых роликов 70. Линия снабжена пневмоцилин- дром (не показан) для осуществления пере дачи рабочего усилия на инструмент 72
инструментальных блоков 71 посредством штока 87 пневмоцилиндра через рычаг 88, палец 89.
Ротор 7 сьема содержит вертикальный вал 90, на который жестко насажены звез- дочка 91, приводная шестерня 92, барабан 93 с ползунами 94. В неподвижно установленном на станине 1 стакане 95 ротора 7 жестко закреплен кулачок 96. Ползуны 94 выполнены с возможностью их одновремен- ного перемещения по пазу кулачка 96 и аксиальным цилиндрическим пазам барабана 93. На концах ползунов 94 закреплены захватные органы 97, выполненные в виде двузубых вилок, ориентированных наружу от оси ротора 7.
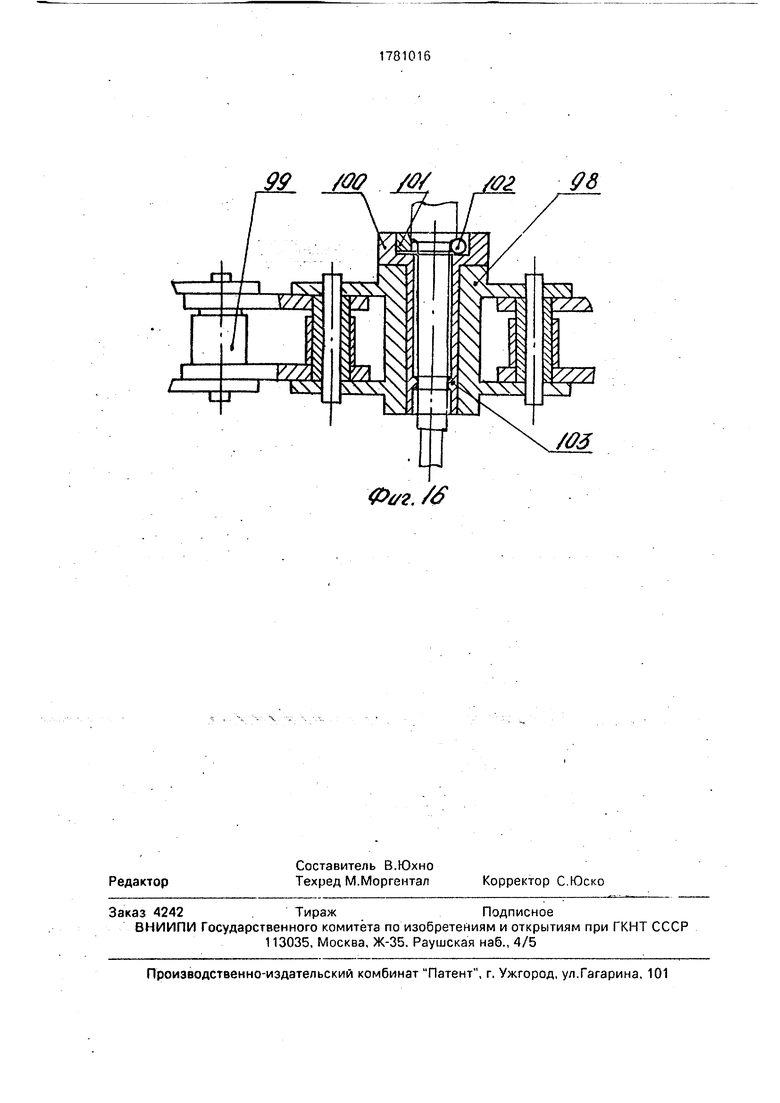
Рабоче-транспортная цепь 11 состоит из рабочих блоков 98 и чередующихся с ними соединительных блоков 99. В гнездах рабочих блоков 98 неподвижно установле- -ны шариковые обкатники, состоящие из вкладышей 100, в гнездах которых закреплены сепараторы 101 с выдавливающимися шариками 102 с возможностью их вращательного движения. Шариковый обкатник снабжен центрирующим пояском 103, выполненным, например, в виде усеченной то- ровой поверхности.
Линия работает следующим образом.
Двигатель привода (не показан) через клиноременную передачу и редуктор (не показан) передает вращательное движение ротору обкатки 6, а от него через соответствующие зубчатые колеса остальным роторам. . Огибающаяроторы рабоче-транспортная цепь 11 получает непрерывное движение в направлении технологического процесса обработки. Обрабатываемые оси загружаются в чашу бункера 17 ориентирующего устройства 2. Вращение от электродвигателя 12 посредством цепной передачи 14 и редуктора 13 передается диску 15 через зубчатый диск 24 и собачки 25. Диск 15, вращаясь, ворошит оси, находящиеся в нижней част чаши бун- кера 17. Оси из-за своей формы будут стремиться занимать положение, параллельное окнам диска 15. и западать в них. При прохождении верхней точки ползун 27, обкатываясь по кулачку 21, опускает вниз планку 26. и ось под собственным весом скатывается между дисками 15 и 16 в сектор, ограниченный длинными планками 29, пока не ударится о короткую планку 30. При ударе ось, из-за того, что она имеет один конец более тяжелый, упадет этим концом вниз и будет перемещаться в таком положении в секторе, ограниченном планками 29 и 30, на угол 270°, считая от верхней точки. Ось при этом займет горизонтальное положение и
через прямоугольное окно в диске 16 под собственным весом упадет на наклонную поверхность ориентатора таким образом, что, когда более тяжелый конец оси коснется этой поверхности, легкий конец оси останется на весу, и ось, заняв вертикальное положение тяжелым концом вверх, под собственным весом упадет в направляющую трубку 31 питающего устройства 3, где будет удерживаться фиксатором 33 до тех пор, пока шибер 32 в результате перемещения ролика 36 по храповому колесу 42 не займет крайнее левое положение. При этом ось, освобожденная от фиксатора 33, под собственным весом западет в захватные губки 34 шибера 32, При движении шибера 32 в крайнее правое положение фиксатор 33 удерживает следующую ось от перемещения вниз. При дальнейшем движении ролика 36 по храповому колесу 42 шибер 32 двигается влево и вставляет ось в клещевые захваты 49 ротора 4 предварительной вставки оси. При этом ползуны 44 ротора 4 находятся в верхнем положении. При вращении ротора 4 ползуны 43, обкатываясь роликами 46 по кулачку 47, совершают возвратно-поступательное движение и через подпружиненные стержни 45 передают такое же движение ползунам 44. На дуге охвата ротора 4 рабоче-транспортной цепью 11 происходит перемещение ползунов 44 и осей, вставленных в клещевые захваты 49, вниз, При этом оси заходят в гнезда рабочих блоков 98 рабоче-транспортной цепи 11. При выписывании рабоче-транспортной цепи 11 из ротора 4 оси освобождаются из клещевых захватов 49. При вписывании рабоче-транспортной цепи 11 с осями в ротор окончательной вставки ползуны 57 при движении роликов 58 по кулачку 56 вниз окончательно вставляют оси в рабочие блоки 98 рабоче- транспортной цепи 11. На дуге охвата рабоче-транспортной цепью 11 ротора 6 обкатки торцевые ролики 70, наезжая на копир 85, перемещают ползуны 68 и инструмент 72 инструментальных блоков 71 вниз. При этом инструмент 72 прижимает ось к шарикам 102 рабоче-транспортной цепи 11, которая рабочими блоками 98 опирается на опорный диск 65. Одновременно инструмент 72, получая вращательное движение от отдельного электродвигателя (не показан), передает за счет трения это движение оси посредством усилия, создаваемого пневмоцилиндром (не показан). Шарики 102, соприкасаясь с осью, обкатывают на ней беговую дорожку, При вписывании рабоче-транспортной цепи 11 на звездочку 91 ротора 7 находящиеся в гнездах рабочих блоков 98 оси входят расширенным концом в разрез вилочных захватов 97, которые за счет перемещения ползунов 94 по участку подъема кулачков 96 совершают поступательное движение вверх и вынимают оси из гнезд рабочих блоков 98 рабоче-транспортной цепи 11 Удаление осей из вилочных захватов 97 осуществляет- ся отбойником (не показан), жестко связанным с ротором 7.
Использование предлагаемого способа обкатки беговой дорожки оси велопедали и роторно-конвейерной линии для его осуществления позволяет обеспечить одновременно с обкаткой центрирование оси в нижней ее части и тем самым повысить качество накатанной беговой дорожки,
Одновременно за счет автоматизации процесса снижается трудоемкость при центрировании, вводе в рабочую зону и съеме осей и повышается производительность.
Формула изобретения
1. Способ обкатки беговой дорожки оси велопедали, при котором осуществляют предварительную ориентацию оси, ее центрирование и ввод в шариковый обкатник, подачу оси в зону обкатки, обкатывание беговой дорожки и сьем оси отличающийся тем, что, с целью повышения производительности за счет автоматизации процесса и качества обработки за счет дополнительного центрирования оси в процессе обкатки, обкатку оси осуществляют с одновременным ее центрированием по одной из нерабочих цилиндрических поверхностей, расположенных ниже беговой дорожки, а ввод оси в шариковый обкатник производят в два этапа, причем на первом этапе предварительное центрирование оси осуществляют по цилиндрической поверхности, являющейся продолжением поверхности беговой дорожки.
2.Роторно-конвейерная линия для обкатки беговой дорожки оси велопедали по п.1, содержащая корпус, привод, ориентирующее, подающее устройство, а также технологический ротор с установленными на
нем звездочками и рабоче-транспортную цепь с вмонтированными в ней деформирующими инструментами, кинематически спя- занную со звездочками технологического
ротора, отличающаяся тем, что. с целью повышения производительности за счет автоматизации процесса и качества обработки за счет дополнительного центрирования оси в процессе обкатки, она снабжена
дополнительными роторами предварительной и окончательной вставки оси, причем последние расположены между технологическим ротором и подающим устройством и кинематически связаны с рабоче-транспортной цепью, ротор предварительной вставки выполнен с храповым колесом, связанным с подающим устройством, а деформирующий инструмент выполнен в виде шарикового обкатника с дополнительным
центрирующим пояском.
3 Роторно-конвейерная линия по п.2, отличающаяся тем, что ротор окончательной вставки оси выполнен в виде смонтированной с возможностью горизонтального перемещения оси с закрепленным на ней в подшипниках барабаном с продольными пазами и расположенными в последнихсвозможностьювозвратно-поступательного перемещения в
вертикальной плоскости ползунами с жестко закрепленными на них пальцами.
4. Роторно-конвейерная линия по п.2, отличающаяся тем, что ротор
предварительной вставки оси выполнен в виде двух жестко насаженных на вал барабанов с расположенными на их периферии верхними и нижними ползунами, подпружиненных стержней и клещевых захватов,
причем стержни жестко закреплены между верхними и нижними ползунами, а клещевые захваты установлены на нижних ползунах с возможностью возвратно-поступательного перемещения в вертикальной плоскости.
m
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОТОЧНАЯ РОТОРНАЯ МАШИНА | 1967 |
|
SU202698A1 |
| Автоматическая роторно-конвейерная линия для сборки медицинской иглы однократного применения | 1990 |
|
SU1775266A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |
| Транспортный ротор | 1991 |
|
SU1815132A1 |
| Транспортный ротор роторно-конвейерной машины | 1990 |
|
SU1740278A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ | 1992 |
|
RU2036771C1 |
| Ротор сборки | 1980 |
|
SU904968A1 |
| Установка для подготовки корпусов боеприпасов к снаряжению | 1970 |
|
SU1841253A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |


Использование: обработка металлов давлением. Сущность изобретения: согласно способу осуществляют предварительную ориентацию оси, ее центрирование и ввод в шариковый обкатник. Обкатку оси осуществляют с одновременным ее центрированием по одной из нерабочих цилиндрических поверхностей, расположенных ниже беговой дорожки. Ввод оси в обкатник производят в два этапа, при этом на первом этапе центрирование осуществляют по цилиндрической поверхности, являющейся продолжением поверхности беговой дорожки. Роторно-конвейерная линия содержит ориентирующее, подающее устройства, технологический ротор с установленными ча нем звездочками и транспортную цепь с размещенными на ней деформирующими инструментами. Роторная линия снабжена дополнительными роторами предварительной и окончательной вставки оси. Ротор предварительной вставки выполнен с храповым колесом, связанным с подающим устройством. Деформирующий инструмент выполнен в виде шарикового обкатника с дополнительным центрирующим пояском, Ротор окончательной вставки оси выполнен в виде смонтированной с возможностью горизонтального перемещения оси с закрепленным на ней барабаном с продольными пазами, в которых размещены ползуны с пальцами. Ротор предварительной вставки оси выполнен в виде двух барабанов с расположенными на их периферии верхними и нижними ползунами, закрепленных между ползунами стержней и клещевых захватов, установленных на нижних ползунах, 2 с. и 2 з.п.ф-лы, 16 ил. сл с
Фиг./
.2
b
Ф09.4
ri
и
«ZWJ
I
OJ
и
l
N
h
Фиг.$
.Ј
Г//////////Л
Фаг.б
г$
/6 /7
ЬидА
Фаг.ё
51
Р«г./0
24
fWAWWWWW1
. 11 . i
WWWWWWa
IN
tlkXNXNX
1
STI
1781016
Plb /
Ј b )§
V7777J№
Фаг, /4
|л I / У / / X 1.
Hfzzzzzr
Ф
%
s
08
./6
| Технологический процесс Педаль левая, правая 8150.09.00-09: В150.10.00- 09, М 37502.01101.00005 | |||
| Министерство автомобильной промышленности СССР, Даугавпилсский завод приводных цепей, 1978 | |||
| Роторно-конвейерная машина | 1978 |
|
SU831627A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
