(54) РУКА МАНИПУЛЯТОРА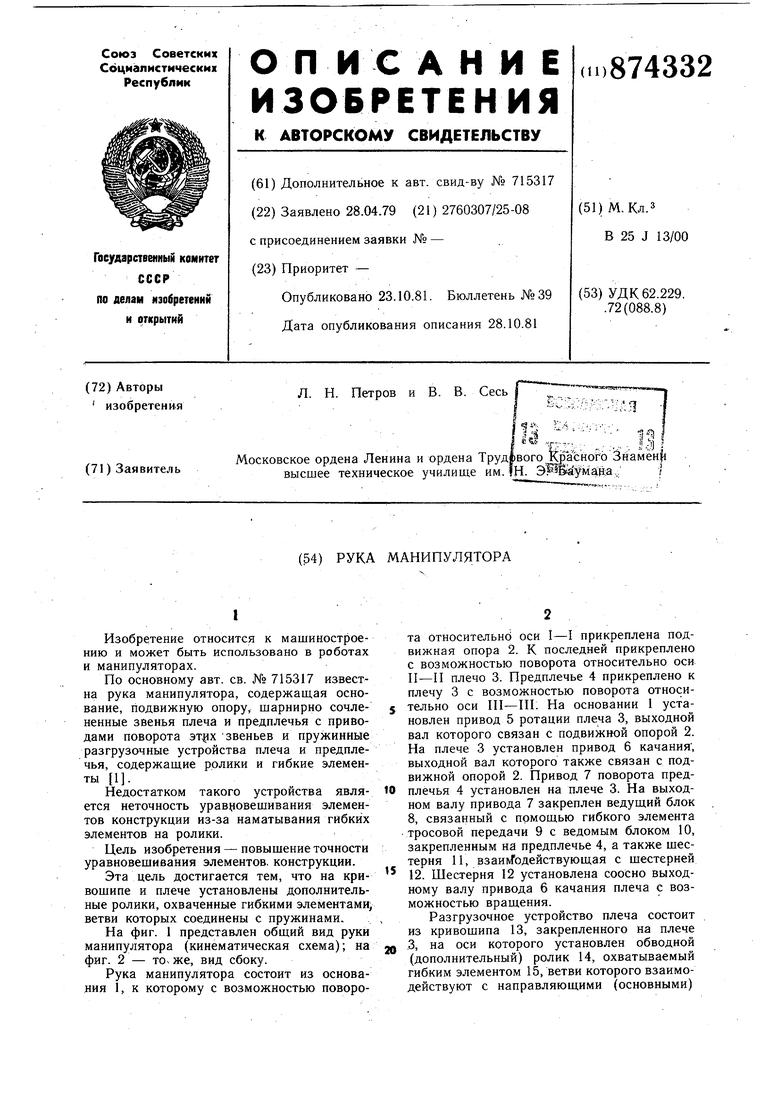
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1978 |
|
SU715317A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Манипулятор | 1983 |
|
SU1106652A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Исполнительный орган манипулятора | 1973 |
|
SU476971A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |
1
Изобретение относится к машиностроению и может быть использовано в роботах и манипуляторах.
По основному авт. св. № 715317 известна рука манипулятора, содержащая основание, подвижную опору, шарнирно сочлененные звенья плеча и предплечья с приводами поворота STj xзвеньев и пружинные разгрузочные устройства плеча и предплечья, содержащие ролики и гибкие элементы 1.
Недостатком такого устройства является неточность уравновешивания элементов конструкции из-за наматывания гибких элементов на ролики.
Цель изобретения - повышение точности уравновешивания элементов, конструкции.
Эта цель достигается тем, что на кривошипе и плече установлены дополнительные ролики, охваченные гибкими элементами; ветви которых соединены с пружинами.
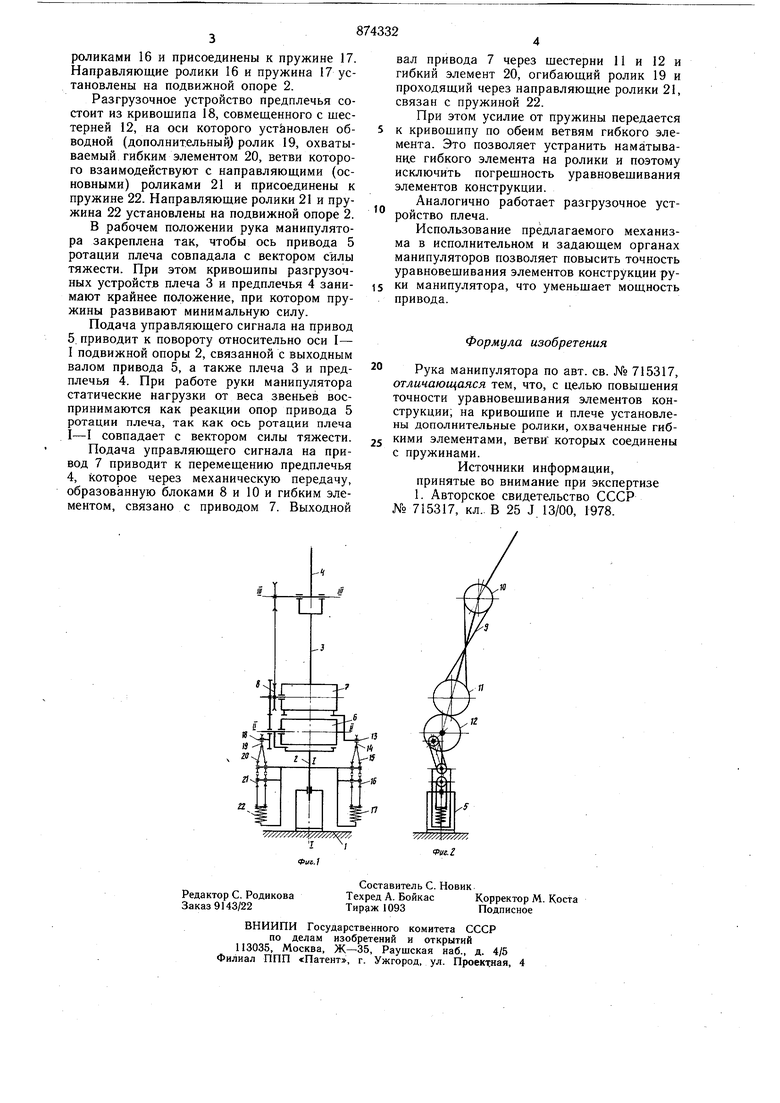
На фиг. 1 представлен общий вид руки манипулятора (кинематическая схема); на фиг. 2 - то же, вид сбоку.
Рука манипулятора состоит из основания 1, к которому с возможностью поворота относительно оси I-I прикреплена подвижная опора 2. К последней прикреплено с возможностью поворота относительно оси II-II плечо 3. Предплечье 4 прикреплено к плечу 3 с возможностью поворота относительно оси III-III. На основании 1 установлен привод 5 ротации плеча 3, выходной вал которого связан с подвижной опорой 2. На плече 3 установлен привод 6 качания , выходной вал которого также связан с подвижной опорой 2. Привод 7 поворота предплечья 4 установлен на плече 3. На выходном валу привода 7 закреплен ведущий блок 8, связанный с помощью гибкого элемента тросовой передачи 9 с ведомым блоком 10, закрепленным на предплечье 4, а также щестерня И, взаилГодействующая с шестерней
Разгрузочное устройство плеча состоит из кривошипа 13, закрепленного на плече .3, на оси которого установлен обводной (дополнительный) ролик 14, охватываемый гибким элементом 15, ветви которого взаимодействуют с направляющими (основными)
