Изобретение относится к устройствам для строительства и ремонта же лезнодорожного пути, в частности к устройствам управления исполнительнь№1 органом выправки железнодорожно- го пути в плане. Известно устройство управления исполнительным органом выправки железнодорожйого пути в плане, содержа щее три измерительные тележки, свя- занные между собой измерительной базой, задатчик положения пути с якорем, датчик положения пути в плане, установленный на средней измерительной тележке и соединенный с входом задатчик-а положения пути, и усилительно-преобразовательный блок, выхо которого соединен с исполнительным органом. Недостатком этого устройства явля ется то, что поправка при работе на переходных кривых пути вносится в устройство в функции пути, что снижа ет точность выправки пути в переходных кривых. Цель изобретения - повышение точности выправки пути в переходных кри вых. Для достижения этой цели устройство управления исполнительным органом вьтравки железнодорожного пути в плане, содержащее три измерительные тележки, связанные между собой измерительной базой, задатчик положения пути с якорем, датчик положения пути в плане, установленный на средней из мерительной тележке и соединенный с входом задатчика положения пути, и усилительно-преобразовательный блок, выход которого соединен с исполнительным органом, снабжено дополнительной измерительной тележкой, уста новденной между средней и задней измерительными тележками по направлению работы устройства, и дополнитель ным датчиком положения пути в плане, установленным дополнительной измерительной тележкой, при этом выход задатчика положения пути соединен с входом указанного дополнительного датчика, выход которого соединен с входом усилительно-преобразовательного блока, а в переходной кривой якорь задатчика смещен относительно нулевого положения на постоянную величину, определяемую соотношением bc() 6R pLnep где а - расстояние от передней измерительной тележки до средней; расстояние между средней и дополнительной измерительными тележками; расстояние от задней измерительной тележки до дополни- . тельной измерительной тележки;радиус круговой кривой; длина переходной кривой. На фиг.1 изображена путевая машина, на которой смонтировано устройство управления исполнительным органом выправки железнодорожного пути в плане, на фиг.2 - электрическая схема подключения Датчиков положения пути и задатчика к усилительно-преобразовательному блоку; на фиг.З - расчетная схема устройства. Устройство управления исполнительным органом выправки железнодорожного пути в плане монтируется на путевой машине и содержит измерительные тележки 1т4, связанные между собой измерительной базой, например тросом 5. Тележка 3 является дополнительной измерительной тележкой. На машине также монтируется исполнительный орган 6 выправки пути в плане. На тележках 2 и 3 установлены датчики 7 и 8 положения пути в плане, измеряюп1ие стрелку прогиба пути относительно троса 5. В кабине машины установлены задатчик 9 положения пути и усилительно-преобразсшательный блок 10. Функции задатчика 8 заключаются в следукмдем. Как известно, четьфехточечные системы не искажают проектное положение пути на прямых и круговых кривых, но вносят значительные искажения на переходных кривых. Для того, чтобы указанного искажения не происходило, сигнал с датчика 8 суммируют с некоторой постоянной величиной, определяемой выражением „ер и сравнивают с сигналом датчика 7 на усилительно-преобразовательном блоке 10, Таким образом, задатчик 9 задает поправку, зависящую от параметров переходной кривой, которая определярадиусом круговой кривой и длиной переходной Lnep Нзвестрю, что форма переходной кривой определяется соотношением кр пер, . 1 - текуг(ая координата переходно кривой; -радиус круговой кривой; -длина переходной кривой. Ординаты каждой точки измерительной хорды (фиг.З) определяется с уче том (2) соотношениями Используя подобие треугольников АВВ, АСС и ADD, найдем выражение для стрел f 1 и fл а У/,) - - Ус - У А Работа системы рихтовки определяется соотношением f. Kf, + 1 - Ч q ) где К - коэффициент, учитьгоающий несимметричность системы. Подставив f , и f из (4) с учетом (3) в (5), после приведения подобных членов получим - 3a2 - 6ab - ЗЬ + ЗКа) + rfL2 -а - - Ь - ЗаЬ + + КаМ q,(6) где ( + Ь-К-а L а + b + с Для того, чтобы система не искажа ла проектное положение пути на переходных кривых без введения корректировки, пропорциональной Р, соотно10 (4) 4 (6) также не должно зависеть Это условие выполняется при .а(Ь + 8) Таким образом, устройство позволяет ставить переходные кривые в про- ектлое положение без корректировки измерительной системы. При работе на прямых и круговых кривых берется равным нулю.. Устройство работает следующим образом. Сигнал о положении пути с выхода датчика 8 через задатчик 9 поступает на вход датчика 7 и далее с него на вход усилительно-преобразовательного блока 10, где определяется величина и направление необходимого смещения рельсошпальной решетки и вьфабатывается команда, поступающая на испол- нительный рабочий орган 6, осуществляющий выправку пути в плане. Во время движения по прямому участку пути якорь задатчика 9 находится в нулевом положении. При входе в переходную кривую якорь при помощи верньерного устройства смещают на постоянную величину q, определяемую соотношением бК рЬпер В заданном положении он остается в течение всего времени движения машины по переходной кривой. В конце кривой якорь возвращают в исходное нулевое положение. Устройство управления исполнительным органом выправки пути в плане обеспечит повышение точности выправки переходных кривых этого пути.
Направление eoia EHifp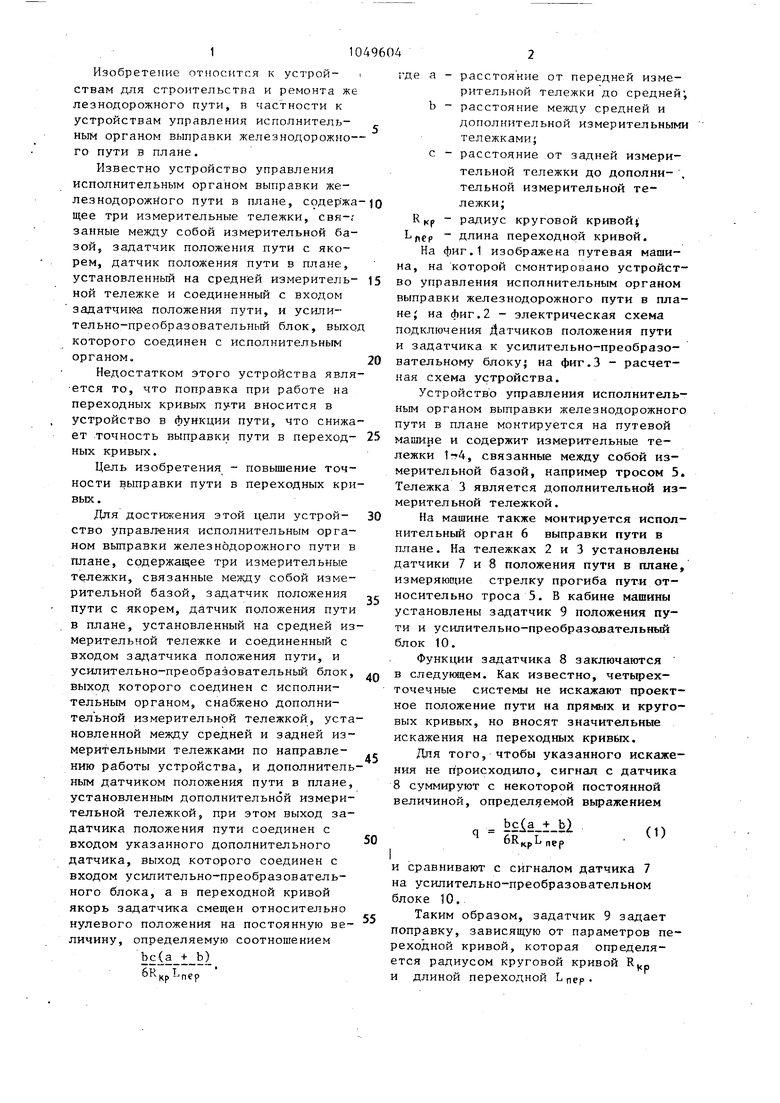
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| Способ выправки пути в продольном профиле и плане и устройство для его осуществления | 1976 |
|
SU667623A1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| Устройство управления рабочим органом для выправки положения пути | 1980 |
|
SU966130A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| Измерительная система устройства для выправки железнодорожного пути | 1985 |
|
SU1310465A1 |

. УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, содержащее три измерительные тележки, связанные между собой измерительной базой, задатчик положения пути с якорем, датчик положения пути в плане, установленный на средней измерительной тележке и соединенный с входом задатчика положения пути, и усилительнопреобразовательный блок, выход которого соединен с исполнительным органом, отличающееся тем, что, с целью повьшения точности выправки пути в переходных кривых, оно снабжено дополнительной измерительной тележкой, установленной между средней и задней измерительными тележками по направлению работы устройства, и дополнительным датчиком положения пути в плане, установленным на дополнительной измерительной тележке, при этом выход задатчика положения пути соединен с входом указанного дополнительного датчика, выход которого соединен с входом усилительно-преобразовательного блока, а в переходной кривой якорь задатчика смещен относительно нулевого положения на постоянную величину, определяемую соотноше, нием 1 ,- , ч (Л 6RKpLntp где а - расстояние от передней измерительной тележки до средней; b - расстояние между средней и дополнительной измерительныо ми тележками; с - расстояние от задней измери4 СО О) тельной тележки до дополнительной измерительной тележки; R - радиус круговой кривой; пер длина переходной кривой. .
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
