При этом мерное колесо 22 механизма цикличного включения устройства коррекции Точки А сделает один полый оборот, в результате чего через кула чок 23 и систему датчиков будет вклю чен в работу механизм 10 перемещения тележки 1 и соответственно точки 4. Благодаря жесткой связи механизма 10 и механизма 15.перемещения площадки
Изобретение относится к устройствам для строительства и ремонта железнодорожного пути, в частности к измерительным системам устройств для выправки железнодорожного пути, управляющими исполнительными органами для выправки железнодорожного пути.
Цель изобретения - повыщение точности выправки пути.
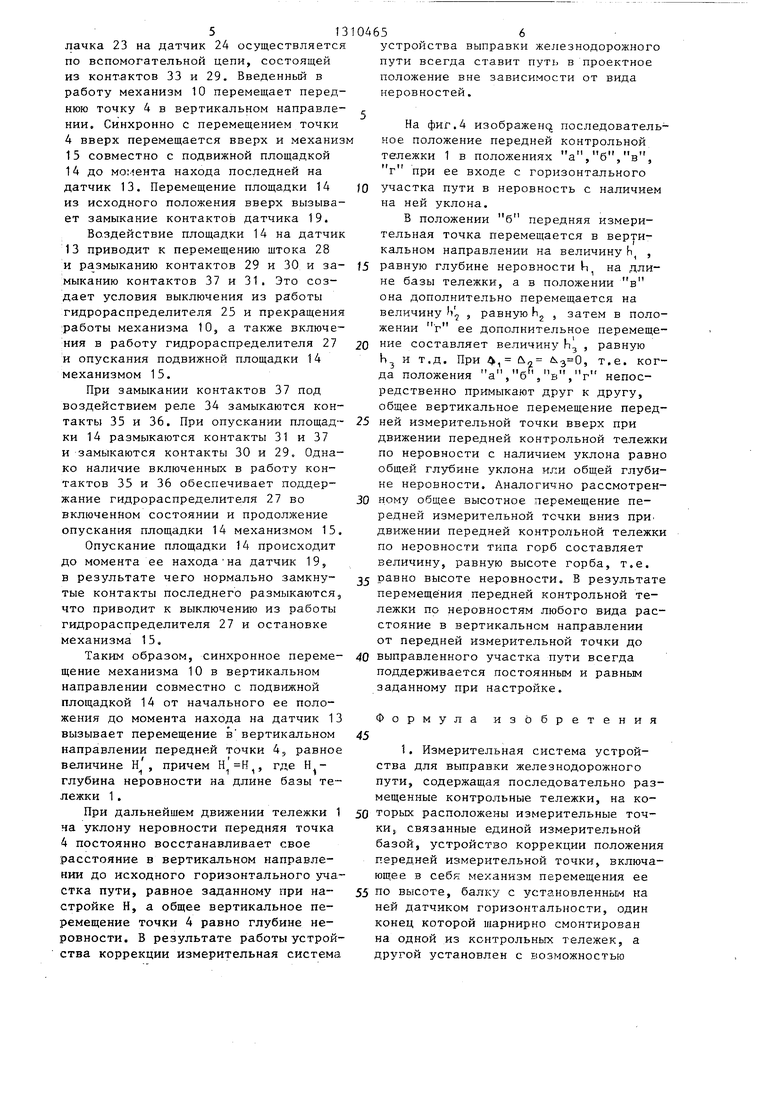
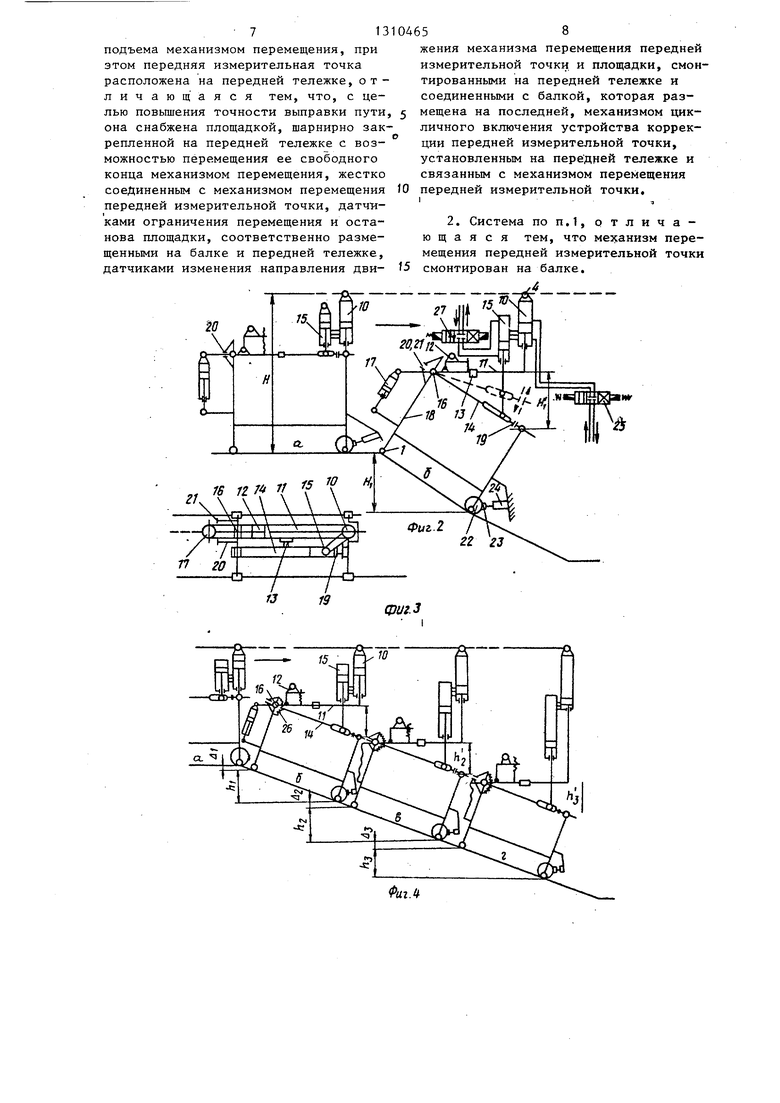
На фиг.1 изображена измерительная система устройства для выправки железнодорожного пути, общий вид; на фиг,2 - передняя контрольная тележка в положениях на горизонтальном участке пути и на неровности с наличием уклона; на фиг.З - передняя контроль- няя тележка, вид в плане; на фиг,4 - последовательные положения передней контрольной тележки на неровности с наличием уклона; на фиг,5 - принципи- альная электрическая схема измерительной системы,Измерительная система устройства для выправки железнодорожного пути содержит контрольные тележки 1-3, на которых размещены соответственно передняя 4, средняя 5 и задняя 6 измерительные точки, связанные единой измерительной базой 7„ Тележка 1 является передней контрольной тележкой и размещена на невыправленном участке 8 пути, тележка.3 находится на выправленном участке 9 пути, тележка 2 - в зоне подъемки (выправки) пути.
Устройство коррекции положения пе- редней измерительной точки размещено на передней контрольной тележке 1 и включает в себя вьшолненный, например, в виде гидроцилиндра механизм 10 перемещения ее по высоте, смон ви- рованный на балке 11, шарнирно закрепленной на тележке 1. Балка 11 не10465
.14, последняя будет подниматься до момента находя на датчик 13 горизонтальности. Взаимодействие площадки 14 и датчика 13 приведет к прекращению работы механизма 10 и опусканию площадки 14 механизмом 15, которое будет происходить до момента находа ее на датчик 19 останова площадки,разме- щенньш на тележке 1 , 1 з.п. ф-лы, 5 ил.
сет датчик 12 горизонтальности и датчик 13 ограничения перемещения подвижной площадки 14, Датчик 13 может быть выполнен, например, в виде электромеханического датчика с нормально закрытыми и нормально открытыми контактами (фиг,5),
Подвижная площадка 14, шарнирно закрепленная на тележке 1, через механизм 15 ее перемешения, выполненный, например, в виде гидроцилиндра, соединена с механизмом 10. Для этого, например, корпуса гидроцилиндров механизмов 10 и 15 соединены между собой жестко.
Балка 11 и площадка 14 имеют возможность раздельного вращения на оси 16,
Датчик 12 через усилительно-преобразовательное устройство (не показано) управляет подъемным механизмом 17 перемещения балки 11,
На раме 18 передней контрольной тележки 1 размещены датчик 19 останова площадки 14 и дао чики 20 и 21 (фиг, 2, 3 и 5)5 первый из которых (Управляет изменением направления перемещения механизма 15, а второй - механизма 10 в зависимости от вида неровностей невыправленного пути (например, неровностей в виде горбов или просадок).
Датчики 19-21 могут быть выполнены, например, в виде электромеханических датчиков, первый из которых с нормально за.крытыми контактами, а два других - трехпозиционные с двумя рабочими и одним нейтральным положением (фиг.З). Датчики 20 и 21 постоянно соединены с балкой 11,
313104654
В исходном положении площадки 14 лежкой 3 перемещается по выправленно- контакты датчика 19 открыты, а при му участку 9 пути, поэтому расстояние ее подъеме закрыты. Кроме того, на в вертикальном направлении от нее до раме 18 смонтирован механизм циклич- выправленного пути сохраняется всегда ного включения устройства коррекции с равным Н, т.е. заданным при настройке, передней измерительной точки, состо- Передняя измерительная точка 4 ящий, например, из мерного колеса 22 совместно с контрольной тележкой 1 с кулачком 23 и датчика 24. Датчик пер§мещается по неровностям невыправ- 24 может быть выполнен, например, ленного участка 8 пути и поддержание электромеханическим с нормально от- fO заданного при настройке расстояния в крытыми контактами (фиг.5). Электро- вертикальном направлении от нее до гидравлический распределитель 25 выправленного пути, равного Н, выпол- управляет перемещением механизма 10. няется устройством коррекции положеМеханизм цикличного включения уст- ния передней измерительной точки, ройства коррекции передней измери- f5 Допустим, что контрольная тележка тельной точки является шаговым меха- 1 совместно с передней измерительной низмом и предназначен для выработки точкой 4 перемещается с горизонталь- управляющих сигналов через вполне оп- ного участка пути в неровность типа ределенные расстояния.просадки с наличием на ней уклона.
Подвижная площадка 14 снабжена 20 т.е. из положения а в положение б тормозным устройством 26, которое мо- (фиг.2), а расстояние в вертикальном жет быть выполнено в виде пружинного, направлении от передней измерительной фрикционного, штырькового и т.п. ме- точки в положении а до горизонталь- ханизмов.ного участка пути равно Н.
Датчик 13, кроме ограничения пе- 25 В неровности балка 11 под воздей- ремещения подвижной площадки 14, сов- ствием датчика 12 и подъемного меха- местно с датчиком 20 через гидрорас- низма 17 всегда сохраняет горизонта- пределитель 27 управляет перемещением льное положение. Однако при перемеще- механизма 15. Датчик 13 содержит шток нии тележки 1 в положение б балка 28, на нем размещены нормально закры-30 11 своим действием вызывает перемеще- тые контакты 29 и 30 и нормально от- ние датчиков 20 и 21 из нейтрального крытьй контакт 31. Контакт 30 соеди- положения в рабочее, при этом датчик нен с реле 32, предназначенным для 21 занимает левое рабочее положение, управления нормально открытым контак- а датчик 20 - правое. Одновременно с том 33. Кроме того, имеется реле 34, 35 зтим изменяется в сторону понижения которое управляет нормально открытыми и вертикальное расстояние от передней контактами 35 и 36. Пластина контакта измерительной точки 4 до исходного 30 имеет возможность перемещения сов- горизонтального участка пути, местно со штоком 28 и замыкать контакты 37.40 Восстановление ранее установленноПроцесс выправки пути в профиле с го при настройке вертикального рас- постановкой рельсошпальной решетки в стояния Н от передней точки 4 до ис- проектное положение выполняется еле- ходного горизонтального участка пути дующим образом.происходит следующим образом.
45
В исходном положении измерительная Мерное колесо 22 при перемещении
система устройства для вьшравки же-;тележки 1 из положения а в положелезнодорожного пути настраивается та-ние б делает один полньш оборот, в
КИМ образом, что расстояние в верти-результате чего кулачок 23 включает
кальном направлении от передней 4 и в работу датчик 24, т.е. датчик замызадней 6 измерительных точек до вып-кает нормально открытые контакты,
равленного участка 9 пути устанавли-Это обеспечивает питание током датчивается одинаковым, например, равнымка 21 и ввод в работу гидрораспредеН (см. фиг.1).лителя 25 и механизма 10. ОдновременПосле настройки измерительная с этим включается в работу реле
тема совместно с выправочной машиной32, которое замыкает нормально откры(не показана) перемещается вдоль пу-тьй контакт 33.
ти. При этом задняя измерительная ° Обеспечение питания током датчика
точка 6 совместно с контрольной те-21 после прекращения воздействия кулачка 23 на датчик 24 осуществляется по вспомогательной цепи, состоящей из контактов 33 и 29. Введенньй в работу механизм 10 перемещает переднюю точку 4 в вертикальном направлении. Синхронно с перемещением точки 4 вверх перемещается вверх и механиз 15 совместно с подвижной площадкой 14 до момента находа последней на датчик 13. Перемещение площадки 14 из исходного положения вверх вызывает замыкание контактов датчика 19.
Во,здействие площадки 14 на датчик 13 приводит к перемещению штока 28 и ра змыканию контактов 29 и 30 и замыканию контактов 37 и 31. Это создает условия выключения из работы гидрораспределителя 25 и прекращения работы механизма 10, а также включения в работу гидрораспределителя 27 и опускания подвижной площадки 14 механизмом 15.
При замыкании контактов 37 под воздействием реле 34 замыкаются контакты 35 и 36. При опускании площадки 14 размыкаются контакты 31 и 37 и замыкаются контакты 30 и 29. Однако наличие включенных в работу контактов 35 и 36 обеспечивает поддержание гидрораспределителя 27 во включенном состоянии и продолжение опускания площадки 14 механизмом 15.
Опускание площадки 14 происходит до момента ее находа на датчик 19, в результате чего нормально замкнутые контакты последнего размыкаются, что приводит к выключению из работы гидрораспределителя 27 и остановке механизма 15.
Таким образом, синхронное перемещение механизма 10 в вертикальном направлении совместно с подвижной площадкой 14 от начального ее положения до момента находа на датчик 13 вызывает перемещение в вертикальном направлении передней точки 4, равное величине Н , причем , где глубина неровности на длине базы тележки 1 .
При дальнейшем движении тележки 1 на уклону неровности передняя точка 4 постоянно восстанавливает свое расстояние в вертикальном направлении до исходного горизонтального участка пути, равное заданному при настройке Н, а общее вертикальное перемещение точки 4 равно глубине неровности. В результате работы устройства коррекции измерительная система
0
устройства выправки железнодорожного пути всегда ставит путь в проектное положение вне зависимости от вида неровностей.
На фиГ,4 изoбpaжeнq последовательное положение передней контрольной тележки 1 в положениях а,б,в, г при ее входе с горизонтального
участка пути в неровность с наличием на ней уклона.
В положении б передняя измерительная точка перемещается в вертикальном направлении на величину h ,
5 равную глубине неровности h, на длине базы тележки, а в положении в она дополнительно перемещается на величину Ь , равную Ь , затем в положении г ее дополнительное перемеще0 ние составляет величину hj , равную Ь и т.д. При ., 0 , т.е. когда положения а, б , в, г непосредственно примыкают друг к другу, общее вертикальное перемещение перед5 ней измерительной точки вверх при
движении передней контрольной тележки по неровности с наличием уклона равно общей глубине уклона или общей глубине неровности. Аналогично рассмотренному общее высотное перемещение передней измерительной точки вниз при. движении передней контрольной тележки по неровности трша горб составляет величину, равную высоте горба, т.е. равно высоте неровности. В результате перемещения передней контрольной тележки по неровностям любого вида расстояние в вертикальном направлении от передней измерительной точки до выправленного участка пути всегда поддерживается постоянным и равным заданному при настройке.
Формула изобретения
5
1. Измерительная система устройства для выправки железнодорожного пути, содержащая последовательно размещенные контрольные тележки, на ко0 торых расположены измерительные точки, связанные единой измерительной базой, устройство коррекции положения передней измерительной точки, включающее в себя механизм перемещения ее
5 по высоте, балку с установленной на ней датчиком горизонтальности, один конец которой шарнирно смонтирован на одной из контрольных тележек, а другой установлен с возможностью
0
5
подъема механизмом перемещения, при этом передняя измерительная точка расположена на передней тележке, отличающаяся тем, что, с целью повьшения точности выправки пути она снабжена площадкой, шарнирно закрепленной на передней тележке с возможностью перемещения ее свободного конца механизмом перемещения, жестко соединенным с механизмом перемещения
передней измерительной точки, датчиI
нами ограничения перемещения и останова площадки, соответственно размещенными на балке и передней тележке, датчиками изменения направления дви-
жения механизма перемещения передней измерительной точки, и площадки, смонтированными на передней тележке и соединенными с балкой, которая размещена на последней, механизмом цикличного включения устройства коррекции передней измерительной точки, установленным на пере дней тележке и связанным с механизмом перемещения
передней измерительной точки,
I ,
2. Система по п.1, отличающая с я тем, что механизм перемещения передней измерительной точки смонтирован на балке.
W
о

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительная система устройства для выправки железнодорожного пути | 1986 |
|
SU1399388A1 |
| Измерительная система устройства для выправки железнодорожного пути | 1982 |
|
SU1063907A1 |
| Устройство для выправки железнодорожного пути | 1980 |
|
SU927883A1 |
| Система выправки железнодорожного пути | 1978 |
|
SU703617A1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2534163C1 |
| Измерительное устройство машины для выправки железнодорожного пути | 1990 |
|
SU1693156A1 |
| Измерительное устройство машины для выправки железнодорожного пути | 1979 |
|
SU787542A1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2468136C1 |
| МАШИНА ДЛЯ ВЫПРАВКИ УЛОЖЕННОГО НА БЕТОННОЕ ОСНОВАНИЕ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1992 |
|
RU2041308C1 |
Изобретение относится к устройствам для строительства и ремонта железнодорожного пути, в частности к измерительном системам устройств для выправки железнодорожного пути, управляющих исполнительными органами для вьшравки железнодорожного пути. Цель изобретения - повышение точности выправки пути. После настройки измерительной системы выправочная машина перемещается вдоль пути. При движении -передней тележки 1 с горизонтального участка в неровность типа просадки смонтированная на тележке 1 балка 11 под воздействием датчика 12 горизонтальности и подъемного механизма 17 будет сохранять горизонтальное положение и вызовет перемещение датчиков 20 и 21, которые смонтированы на тележке 1, соединены с балкой 11 и служат для изменения направления перемещения соответственно передней измерительной точки 4 и площадки 14, шар- нирно смонтированной на тележке 1. € (Л У Фиа/ 4 сз: 01 8 i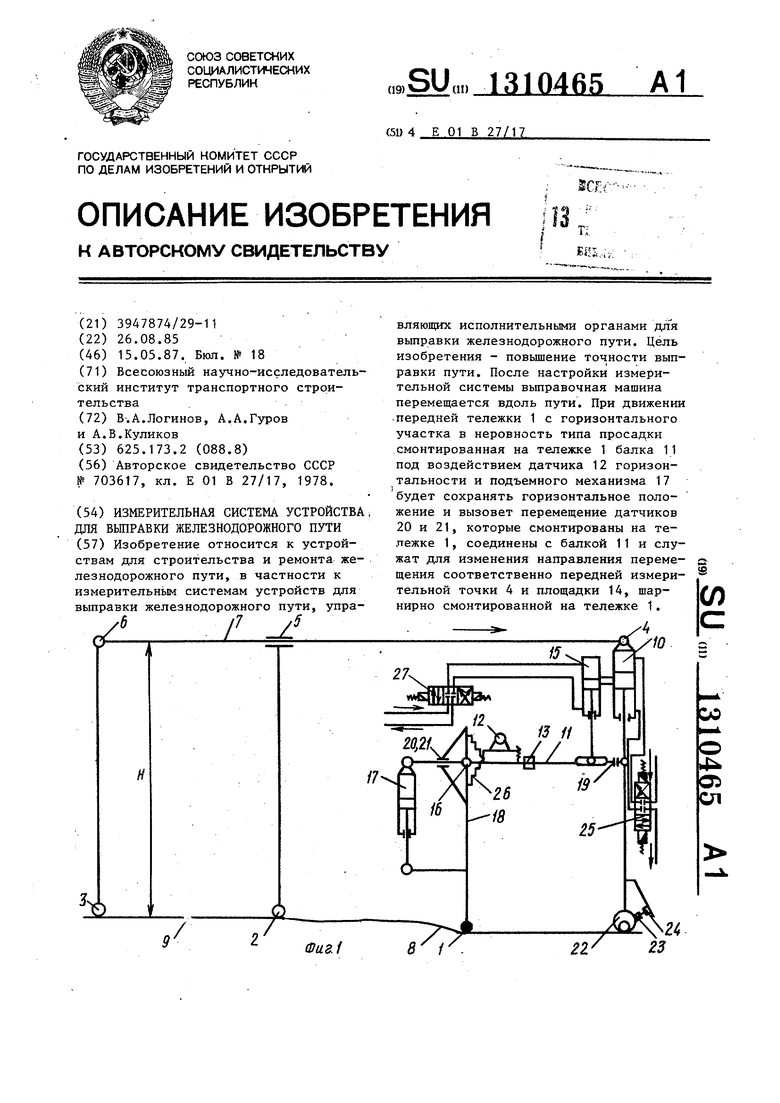
Фиг Л
/
Подбод
Отдод
36
А: ГТ
ISAW
хЛ
.5
Редактор Л.Пчолинская
Составитель Т.Кашликова
Техред Н.Глущенко Корректор А.Обручар
Заказ 1871/27 . Тираж 489 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Система выправки железнодорожного пути | 1978 |
|
SU703617A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
