6 2/ 0 7 7
шл
.. Ч TV VTI1
d±E
у /- - т
f чх ух i4Ч хлгхX ч ч
.V А,, ГА у
/ / /
/ п У/л
/л /л 5.улллч v5
Т
19 1 23
7
/
I
К//У1
(Л
5 11
JZ1.
ллч v5
I
ел о ел Nl
N5
Изобретение относится к области машиностроения, а именно к манипуляторам для захвата и ориентации деталей относительно технологического оборудования.
Целью изобретения является упрощение конструкции за счет уменьшения числа приводных механизмов.
На чертеже изображена рука манипулятора.
Рука манипулятора содержит механизм выдвижения схвата, выполненный в виде силового цилиндра, состоящего из гильзы 1 с крышкой 2, поршня 3, полого щто- ка 4, внутри которого находится привод штанги 5, выполненный в виде поршня 6,
10
копира 13, при этом соединенные с ними губки 14 схвата 8 смыкаются. Пальцы 12 ползунов 11 взаимодейстЕ;уют с прямолинейными участками профильных канавок 18. Если необходимо произвести ротацию схвата без его отвода назад, ве:личину подаваемой дозы определяют такчм образом, чтобы шток 7 отошел назад до положения, когда пальцы 12 ползунов 11 пройдут выполненный по винтовой линии участок канавок 18, остановившись на прямолинейном участке таким образом, чтобы губки 14 схвата оставались сомкнутыми.
При дальнейшем движении штока 7 ползуны 1 1 взаимодействуют с выступом 17
20
штока 7. На переднем конце штока 4 15 копира 13, ползуны 11 раздвигаются и сое- закреплен схват 8, состоящий из корпуса 9, диненные с ними губки 14 размыкаются, установленного на подшипниках 10, ползунов 11 с пальцами 12 копирного механизма, входящими в зацепление с его копиром 13, размещенным на конце штанги 5. Ползуны 11 связаны с губками 14 и поджимаются пружинами 15, сила поджа- тия которых регулируется гайками 16.
Копир 13 имеет выступы 17, образующие ei o ступенчатый профиль, и профильные канавки 18, которые имеют участки. 25 с подпружиненными губками, шарнирно уста- вынолменные по винтовой линии и сопряженные с участками, параллельными оси схвата.
Рука манипулятора работает следующим образом.
Возврат схвата осуществляется подачей рабочей жидкости в полость 20, при этом в полостях 22 и 23 должно поддерживаться давление, необходимое для обеспечения заданного закона ротации схвата 8.
Формула изобретения Рука манипулятора, содержащая схват
новленныи на полом штоке силового цилиндра его выдвижения и губки которого кинематически связаны с иыходным концом концентрично размешенной в полости штока штанги, другой конец которой связан с
При (юдаче необходимой дозы рабочей 30 приводом.ее перемещения, и копирный мехажидкости в полость 19 njTOK 4 со схва- том перемещается вперед до заданного положения, после чего осуществляется подача рабочей жидкости в полость 20, откуда она по каналу 21 поступает в полость 22 привода штанги 5, шток 7 кото- 35 рого отходит назад до требуемого положения. Величина хода штока 7 задается дозой рабочей жидкости. Ползуны 11 за счет усилия пружин 15 перемещаются к оси
низм с копиром и пальцами, отличающаяся тем, что, с целью упрощения конструкции, пальцы копирного механизма закреплены на губках схватг, а его копир выполнен в виде профильных канавок и выступов, размещенных на выходном конце щтанги с возможностью их взаимодействия с пальцами для обеспечения заданного закона смыкания губок и ротации схвата.
0
копира 13, при этом соединенные с ними губки 14 схвата 8 смыкаются. Пальцы 12 ползунов 11 взаимодейстЕ;уют с прямолинейными участками профильных канавок 18. Если необходимо произвести ротацию схвата без его отвода назад, ве:личину подаваемой дозы определяют такчм образом, чтобы шток 7 отошел назад до положения, когда пальцы 12 ползунов 11 пройдут выполненный по винтовой линии участок канавок 18, остановившись на прямолинейном участке таким образом, чтобы губки 14 схвата оставались сомкнутыми.
При дальнейшем движении штока 7 ползуны 1 1 взаимодействуют с выступом 17
5 копира 13, ползуны 11 раздвигаются и сое- диненные с ними губки 14 размыкаются,
копира 13, ползуны 11 раздвигаются и сое- диненные с ними губки 14 размыкаются,
с подпружиненными губками, шарнирно уста-
Возврат схвата осуществляется подачей рабочей жидкости в полость 20, при этом в полостях 22 и 23 должно поддерживаться давление, необходимое для обеспечения заданного закона ротации схвата 8.
Формула изобретения Рука манипулятора, содержащая схват
с подпружиненными губками, шарнирно уста-
новленныи на полом штоке силового цилиндра его выдвижения и губки которого кинематически связаны с иыходным концом концентрично размешенной в полости штока штанги, другой конец которой связан с
приводом.ее перемещения, и копирный механизм с копиром и пальцами, отличающаяся тем, что, с целью упрощения конструкции, пальцы копирного механизма закреплены на губках схватг, а его копир выполнен в виде профильных канавок и выступов, размещенных на выходном конце щтанги с возможностью их взаимодействия с пальцами для обеспечения заданного закона смыкания губок и ротации схвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захват манипулятора | 1990 |
|
SU1757875A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Установка для прессования,съема и загрузки изделий на конвейер | 1984 |
|
SU1238969A1 |
| Схват | 1986 |
|
SU1390021A1 |
| Схват манипулятора для цилиндрических деталей | 1986 |
|
SU1323373A1 |
| Кантователь труб | 1990 |
|
SU1726082A1 |
Изобретение относится к машиностроению, а именно к манипуляторам для захвата и ориентации деталей относительно технологического оборудования, а также их переноса в разные точки обслуживаемого пространства. Цель изобретения - упрощение конструкции за счет уменьшения числа приводных механизмов. Рука манипулятора содержит механизм выдвижения схвата 8, выполненный в виде силового цилиндра с полым штоком 4, внутри которого размещен привод штанги 5, выполненный также в виде силового цилиндра. Передняя часть штанги 5 имеет кулачок 13 и кинематически связана с губками 14 схвата. Кулачок 13 снабжен профильными канавками 18 и выступами 17, обеспечивающими заданный закон смыкания губок и ротации схвата. 1 ил.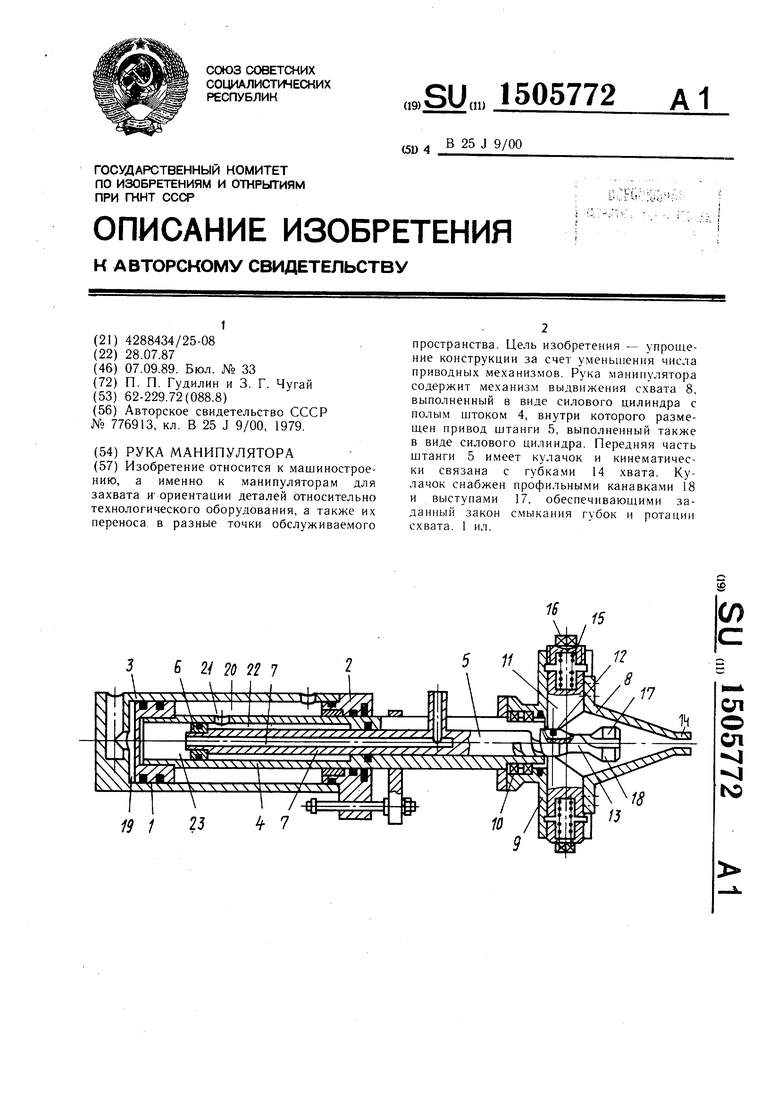
| Рука промышленного робота | 1979 |
|
SU776913A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
