Изобретение относится к автомати ческим системам и может быть исполь зовано для управления объектами с запаздыванием, работающими под воздействием помех. Известна система автоматического управления с Использованием регулят ра Ресвика для объектов с запаздыва нием, содержащая последовательно соединенные первый сумглатор, обратн модель объекта беззапаздывания, второй сумматор, выход которого через объект управления соединен с первым входом первого сумматора и через блок задержки с временем задержки, равным времени запаздывания объекта, и коэффициентом , меньшим единицы, соединен с еторым входом второго сумматора l . Недостатком указанной системы является малая устойчивость, вызван ная положительной обратной связью через блок задержки. Наиболее близкой к предлагаемой является система управления для объектов с запаздыванием, содержащая последовательно соединенные HC-полнительный блок, объект с запаздыванием, первый сумматор, второй сумматор, третий сумматор, регулято и последовательно соединенные модель объекта без запаздывания и бло запаздывания, подключенный входом к второму входу второго сумматора, а выходом - к второму входу первого сумматора 2 . Недостатком указанной системы является низкая точность регулиро ания в условиях действия внешних Неконтролируемых возмущений. Цель изобретения - повышение пом хоустойчивости системы. Для достижения поставленной цели система управления содержит последовательно соединенные обратную мо дель объекта беэ запаздывания, обратную модель исполнительного блока и четвертый сумматор, подключенный вторым входом к выходу регулятора, а выходом - к входу исполнительного блока, вход обратной модели объекта без запаздывания соединен с выходом первого сумматора. На чертеже представлена функциональная схем системы управления для объектов с запаздыванием.
Система содержит первый сумматор 1, регулятор 2, второй сумматор 3, исполнительный блок 4, объект 5, V , , W M lM lllv ( P(plW(P).N.,(plW,((Pl Как видно из (4) rf (5) , составляющая выходного сигнала объекта, вызванная внешним возмущающим воздайДля сравнения выражение изображения выходного сигнала системы, побтроенной по прототипу модель 6 объекта без запаздывания, блок запаздывания, третий сумма-тир 8, обратную модель 9 объекта без запаздывания, обратную модель 10 исполнительного блока и четвертый сумматор 11. Система работает следующим образом. При изменении сигнала задания ioA появляется сигнал рассогласования , который обрабатывается регулятором 2. Если внешнее возмущающее воздействие f отсутствует, то величина сигнала Z на выходе сумматора 1 равна нулю и сигнал с выхода модели 6 имеет одинаковое значение с выходным сигналом объекта 5 через , время запаздывания.. Если внешнее возмущающее воздействие Р действует на сбЬект, то величина сигнала Z на выходе первогс сумматора 1 отличается от нуля. Причем в этом сигнале содержится информация о внешнем возмущении. Определим величину выходного сигнала объекта. Пусть передаточная , функция объекта 5 имеет вид W(,(p)e; передаточная функция регулятора 2W(p) ; передаточная функция исполнительного блока 4 Wpj (р) }-передаточная фуйкция объекта 5 по возмущавядему воздействию W | (р f передаточная функция модели 6 объекта без запаздывания Wj, (р ; передаточная функция обратной модели 9 объекта запаздывания /Wo(p) ; передаточная функция обратной модели 10 исполнительного блока 1 / /(р) Запишем выражения изображения сиг-налов Z , Е , Y соответственно ) U(p) F((p)- U((p , (/) H iaAlP)-(P)i(p)W7(p)4(p)-2(p) 2(Р) V(p)C(p)W,{p)W,(p)Wo(p),i;))W.(plWo(p}e-fnF(p)w(p).t5) из (1) - ( 3 ) следует Ap)W2lp)Wo(p)e loAlPV )W2(P)Wo(P +-F(p)Wf(p)e-P(H-e- p). P( + W(p)Wi(p)Wo(pl-Wnp)Wj(p)Wo(p) (5j (p)W(plWo(p ствием в предлагаемой системе меньше, чем в системе, построенной по прртотиПу. Кроме того, эта составлягомая
3 1051502И
выходного сигнала объекта в предлага-лагаемой системы прототипа одиемой системе в установившемся режимемаковы.
при - о-, р-J. о обращается в нуль.
В то же время в прототипе эта состав-Таким образом, предлагаемое изобляющая отлична от нуля. ,ретение позволяет повысить точность
Из (4) и (5) видно.также,5 регулирования в условиях действия
что условия устойчивости пред-внешних неконтролируемых возмущений,
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления для объектов с запаздыванием | 1990 |
|
SU1714572A1 |
| Устройство для регулирования объекта с запаздыванием | 1977 |
|
SU911463A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Система автоматического управления | 1980 |
|
SU985761A1 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
| Система управления для объектов с запаздыванием | 1984 |
|
SU1239686A1 |
| Устройство для компенсации запаздывания | 1982 |
|
SU1108390A1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
СИСТЕМА УПРАВЛЕНИЯ .ДЛЯ ОБЪЕКТОВ С ЗАПАЗдаВАНИЕМ, содержащая последовательно соединенные исполнительный блок, объект с запаздыванием, первый сумматор, второй сумматор, третий сумматор, регулятор| и последовательно, соединенные модель объекта без запаздывания и блок, запаздывания, подключенный входом к второму входу второго сумматора, выходом - к второму входу первого сумматора, отличающаяся тем, что, с целью повышения помехоустойчивости системы, она содержит последовательно соединенные обратную модель объекта без запаздывания, обратную модель исполнительного блока и четвертый сумматор, подключенный вторым входом к выходу регулятора, а выходом - к входу исполнительного блока вход обратной модели объекта без запаздывания соединен с выходом цер врго сумматора. (Л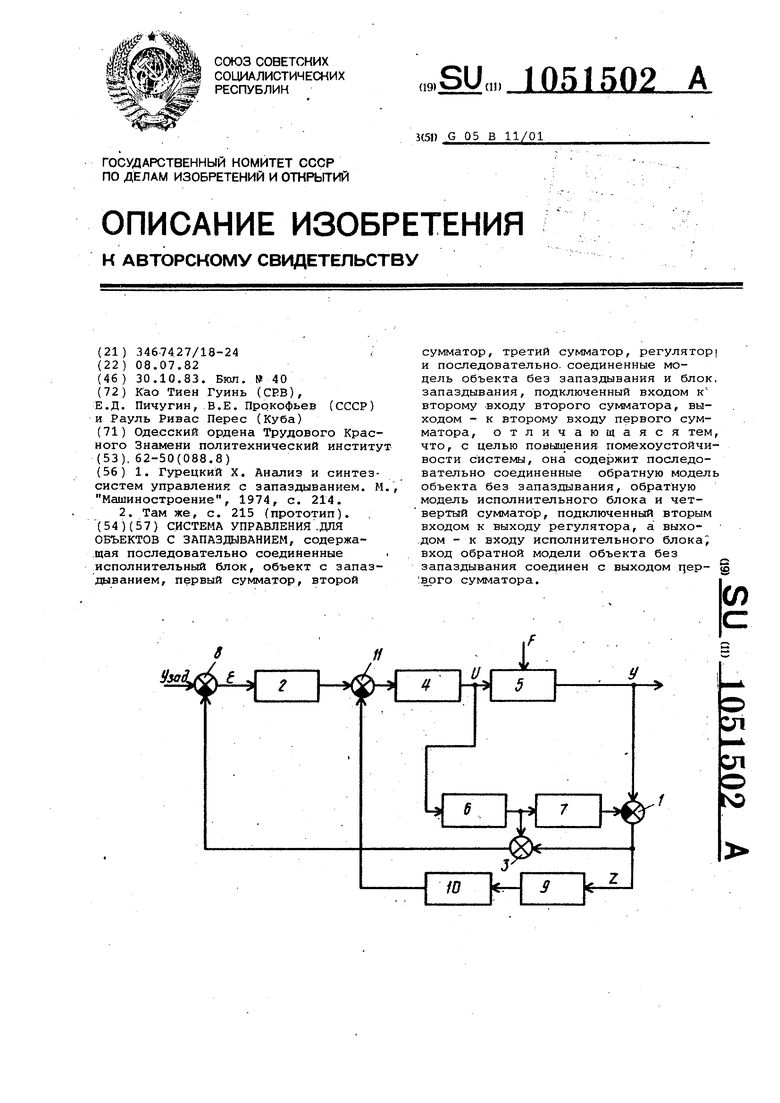
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Турецкий X | |||
| Анализ и синтезсистем управления с запаздыванием | |||
| М., Машиностроение, 1974, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с | |||
| Кузнечный горн | 1921 |
|
SU215A1 |
