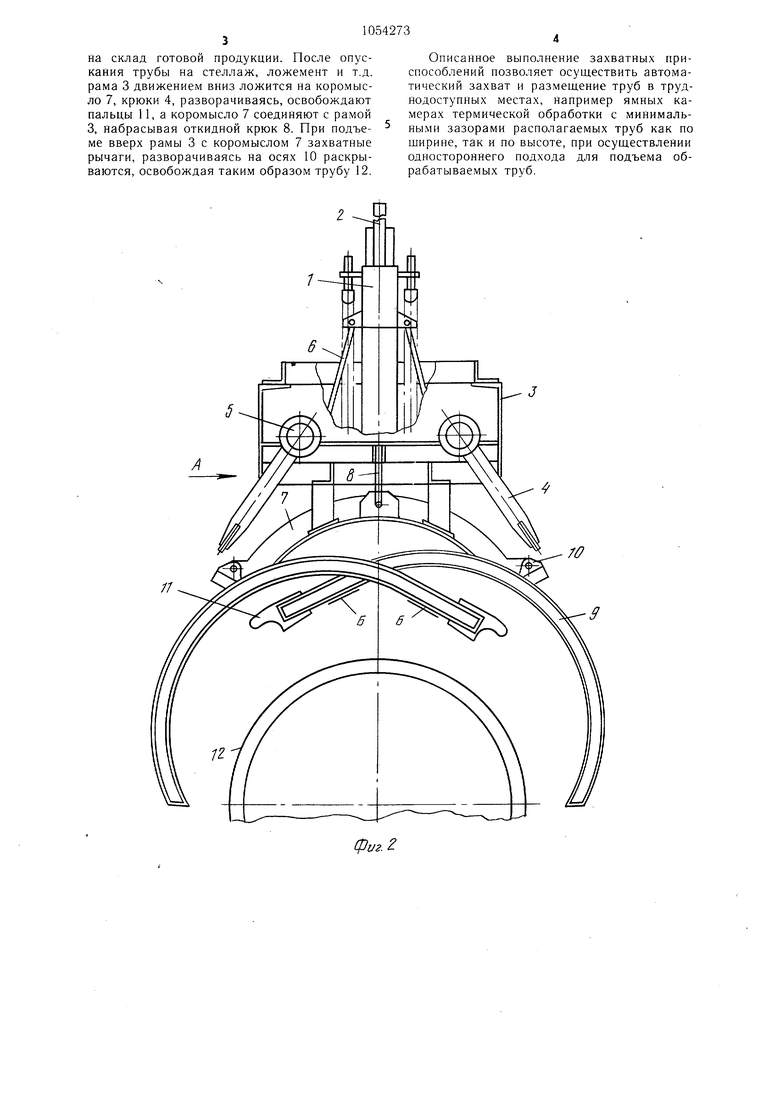
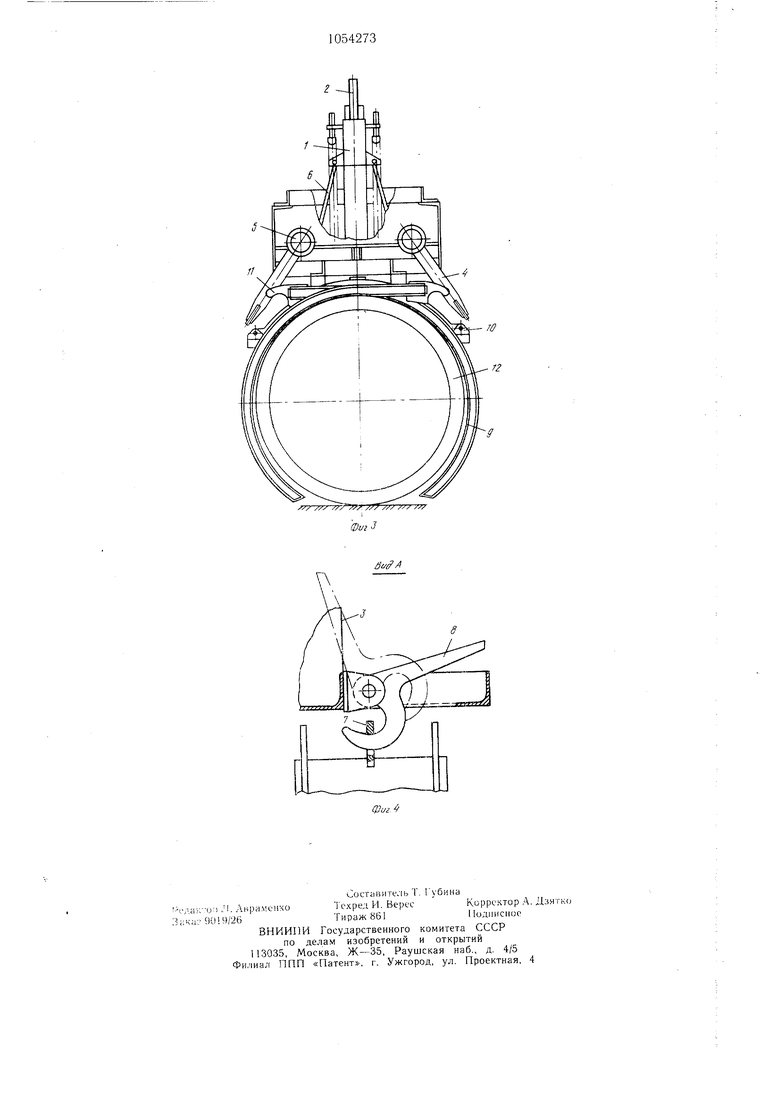
Изобретение относится к грузоподъемным устройствам, а именно к устройствам для захвата и транспортировки труб. Наиболее эффективно изобретение может быть использовано для захвата и транспортировки крупногабаритных железобетонных труб в процессе их производства, например, при загрузке и выгрузке труб из ямных камер термовлажностной обработки при многоярусном их расположении и малых зазорах между ними как по горизонтали, так и по вертикали. Известно захватное устройство, содержащее шарнирно прикрепленные средними своими частями к несущему элементу профилированные захватные рычаги и механизмы фиксации захватных рычагов в раскрытом положении, включающие в себя каждый закрепленный на верхнем плече клещевипы палец, установленный с возможностью взаимодействия с поворотным крюком, прикрепленным к промежуточному элементу, кинематически связанному с петлей для навески на крюк грузоподъемной машины Однако известное устройство недостаточно удобно в эксплуатации в связи с тем, что оно не применимо для захвата и транспортировки железобетонных труб больших диаметров при многоярусном их размещении, например, в камерах для термовлажностной обработки свежеотформованного бетонного покрытия. Особенности такого рода требуют достаточно большой плошади контактной поверхности захватных приспособлений. Ширина же поворотных лап известного устройства лимитирована расстояниями между трубами, которые в пропарочных камерах очень малы. Кроме того, условие достаточной площади опорной поверхности требует более полного охвата периметра трубы, что повлечет за собой значительные увеличения необходимых зазоров между трубами но вертикали (по ярусам). Цель изобретения - повышение удобства работы.при его эксплуатации. Поставленная цель достигается тем, что в захватном устройстве, содержащем шарнирно прикрепленные средними своими частями к несуп:.ему элементу профилированные захватные рычаги и механизмы фиксации захватных рычагов в раскрытом положении, включающие в себя каждый закрепленный на верхнем плече клещевины палец, установленный с возможностью взаимодействия с поворотным крюком, прикрепленным к промежуточному элементу, кинематически связанному с петлей для навески на крюк грузоподъемной машины, несущий элемент выполнен в виде объемно прикрепленного к промежуточному элементу коромысл-а, на концах которого закреплены захватные рычаги с возможностью взаимодействия верхними плечами с противоположными крюками. Такое выполнение устройства позволяет повысить удобство его в эксплуатации. На фиг. 1 изображено захватное устройство, вид сбоку; на фиг. 2 - то же, в раскрытом положении, вид с торца; на фиг. 3 - то же, в закрытом положении в процессе захвата трубы, вид с торца; на фиг. 4 - вид А на фиг. 1. Захватное устройство содержит траверсу 1, крановую петлю 2, кинематически связанную с промежуточным элементом, выполненным в виде рамы 3, несущей на себе крюки 4, посаженные на поворотных осях 5, приводимых с помощью системы рычагов 6. К Несущему элементу, выполненному в виде коромысла 7, съемно закрепленного на раме 3 при помощи, откидных крюков 8, шарнирно прикреплены средними своими частями профилированные захватные рычаги 9 при помощи осей 10. Захватные рычаги на верхних своих плечах снабжены пальца.ми И для обеспечения подхвата захватных рычагов 9 поворотными крюками 4. Работа устройства по загрузке и выгрузке, напри.мер, при термовлажностной обработке железобетонных труб в пропарочной камере ямного типа осуп1ествляется следующим образом. При подходе устройства к готовой трубе 12 захватные рычаги 9 находятся в раскрытом положении. По мере движения рамы 3 на трубу верхние плечи захватных рычагов 9, обкатываясь по цоверхности трубы 12, поворачиваются вокруг осей 10 на плечах коромысла 7, и тем самым охватьгвают периметр трубы 12. При этом верхние плечи рычагов 9, снабженные пальцами 11, занимают горизонтальное положение. Коро.мысло 7 и связанная с ним откидным крюком 8 рама 3 ложатся на трубу 12 и при дальнейщем ходе ползуна крановой петли 2 с помощью системы рычагов 6, крюки 4, поворачиваясь вокруг осей 5, занимают положение для подхвата пальцев 11. Далее вручную откидывают крюк 8, освобождая, таким образом из зацепления с рамой 3 коромысло 7. Обратным ходом вверх крюки 4 входят в зацепление с пальцами 11 и усилиями рычагов с опорами в осях 10 захватными рычагами 9 подхватывают трубу 12. После опускания трубы 12 в камеру термической обработки при дальнейшем движении вниз рама 3 опирается на коромысло 7, и с помощью рычажной системы 6 крюки 4, опускаяЕ, разворачиваются на осях 5, освобождаясь от зацепления с пальцами 11. Затем крановая подвеска 2 с траверсой 1 и рамой 3 поднимаются из камеры, а захватное устройство, а именно: коромысло 7 с рычагами 9 остается на трубе 12. При выемке трубы из камеры рама 3 ложится на коромысло 7, крюки 4, разворачиваясь в обратном порядке, подхватывают пальцы И и, таким образом труба транспортируется, например.
на склад готовой продукции. После опускания трубы на стеллаж, ложемент и т.д. рама 3 движением вниз ложится на коромысло 7, крюки 4, разворачиваясь, освобождают пальцы 11, а коромысло 7 соединяют с рамой 3, Набрасывая откидной крюк 8. При подъеме вверх рамы 3 с коромыслом 7 захватные рычаги, разворачиваясь на осях 10 раскрываются, освобождая таким образом трубу 12.
Описанное выполнение захватных приспособлений позволяет осуществить автоматический захват и размещение труб в труднодоступных местах, например ямных камерах термической обработки с минимальными зазорами располагаемых труб как по ширине, так и по высоте, при осуществлении одностороннего подхода для подъема обрабатываемых труб.
J
7ff
3
фа г. г
//
// // //7 // /
фиг J
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Захватное устройство | 1990 |
|
SU1792908A1 |
| Захватное устройство для изделий с центральным отверстием | 1984 |
|
SU1294751A1 |
| Автоматический захват для штучных грузов | 1982 |
|
SU1062167A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| Захватное устройство для грузов с отбортовкой | 1983 |
|
SU1085925A1 |
| СТРОПОВЫЙ ЗАХВАТ ДЛЯ МЕТАЛЛИЧЕСКИХ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2002 |
|
RU2242418C2 |
| Автоматический захват | 1958 |
|
SU117634A2 |
ЗАХВАТНОЕ УСТРОЙСТВО, преимущественно для труб, содержащее щарнирно прикрепленные средними своими частями к несущему элементу профилированные захватные рычаги и механизмы фиксации захватных рычагов в раскрытом положении, включающие в себя каждый закрепленный на верхнем плече клещевины палец, установленный с возможностью взаимодействия с поворотным крюком, прикрепленным к промежуточному элементу, кинематически связанному с петлей для навески на крюк грузоподъемной мащины, отличающееся тем, что, с целью повьпиения удобства в эксплуатации, несущий элемент выполнен в виде съемно прикрепленного к промежуточному элементу,- коромыслй, на концах которого закреплены захватные рычаги с возможностью взаимодействия верхними плечами с противоположными крюками. J (Л J О 4 to СО -9 (Рш.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КЛЕЩЕВОЙ ЗАХВАТ | 0 |
|
SU213313A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
