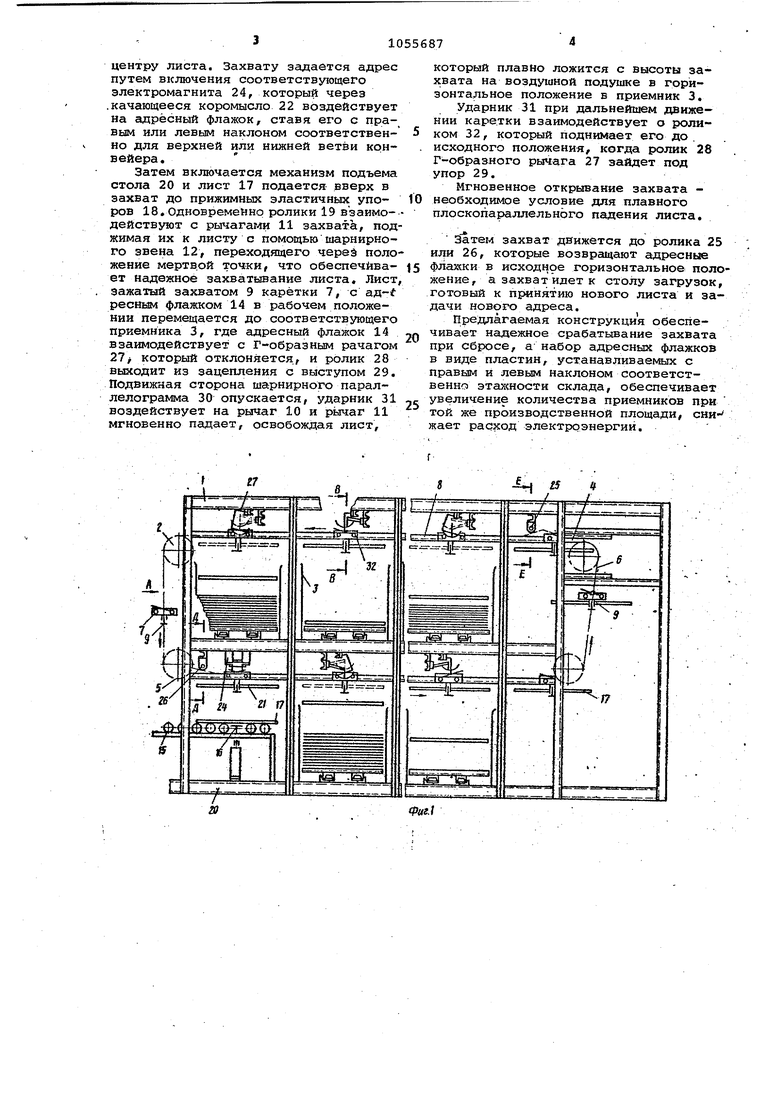
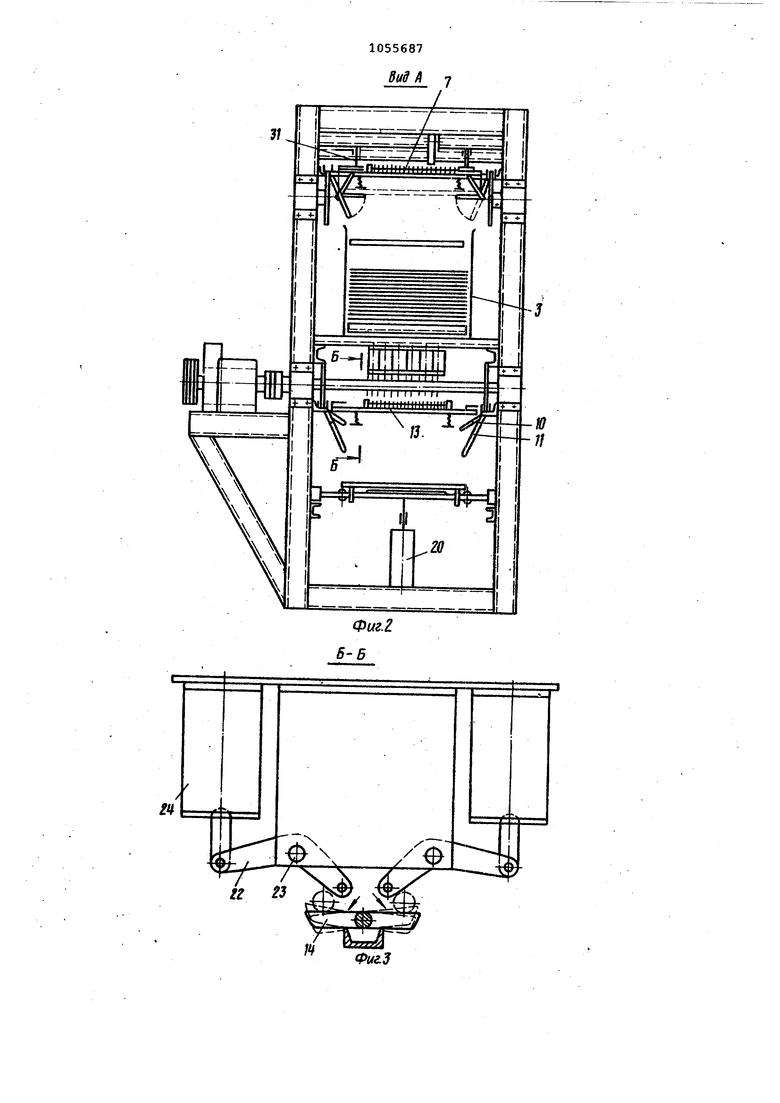
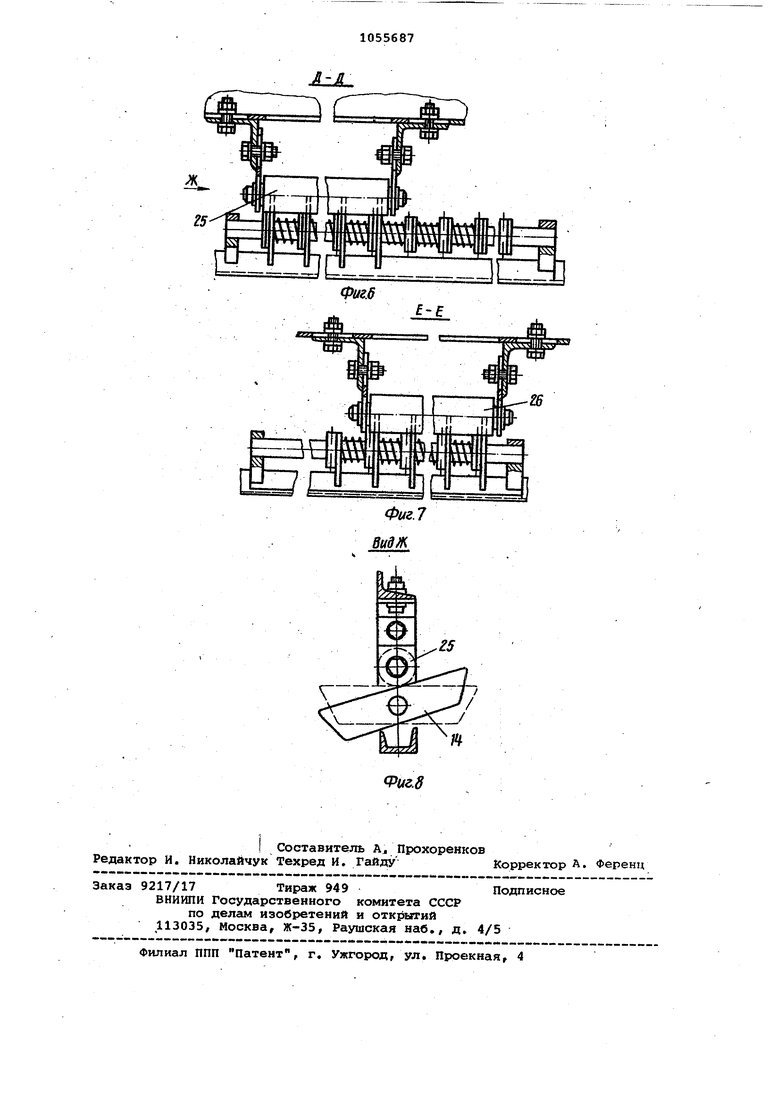
Изобретение относится к транспортировке,сортировке и укладке плоских предметов и может быть использовано дл сортировки и укладки листов органического стекла в приемники. Известно устройство, содержащее каретку с захватами для плоских Пред метов, под которыми установлены упор и .горизонтальные направляющие для перемещения каретки ij . Однако это устройствй имеет низку надежность и ограниченную область использования. Наиболее близким к изобретенщо по технической сущности и достигаемо му результату является устройство,содержащее закрепленные шарнирно на тяговом органе бесконечного конвейера с возможностью перемещения по горизонтальНЕом направляющим каретки, на каждой из которых установлены с возможностью поворота в вертикальной .плоскости адресные флажки и соединен ные между собой шарнирно захваты, вы полненные в виде размещенных под углом в вертикальной плоскости рыча.гов первого .рода, к нижней части каж дой из которых укреплены эластичные упоры для контакта со свободным плечом нижнего рычага, укрепленные на кронштейнах ударники с возможностью действия каждого с в.ерхним рычагом, размещенные под одной из ветвей бесконечного конвейера приемники с упорами, установленными с возможностью взаимодействия с адресными флажками 2 . Недостатком иавестного устройства является низкая производительность. Цель изобретения - увеличение про изводительности. эта цель достигается тем что устройство для раскладки плоских предметов, содержащее закрепленные шарнирно на тяговом органе бесконечного конвейера с возможностью перемещения по горизонтальным.направляющим карет ки, на каждой из которых установлены с возможностью поворота в вертикальной плоскости адресные флажки и с6.единенные между собой шарнирно захва ты, выполненные в виде размещенных под углом в вертикальной плоскости рычагов первого рода, к нижйей ;каретки прикреплены эластичные упоры для контакта со свободным плечом нижнего рычага/ укрепленные на кронштейнах ударники с возможностью взаи модействия каждого с верхним рычагом, размещенные под одной из ветвей бесконечного конвейера приемники с упорами, установленными с.возможностью взаимодействия с адресными флажками, снабжено размещенными под другой ветвью бесконечного конвейера дополнительными приемниками с упорами, причем упоры выполнены в виде Г-образных рычагов с опорными эле- ментами, а ударники установлены у приемников и представляют собой шарч нирные параллелограммы с выступами для взаимодействий с опорными элементами Г-образных рачагов, адресные флажки установлены на общей оси и выполнены в виде коромысла, На фиг, 1 схематично изображено предлагаемое устройство на фиг. 2 вид .А на фиг, .1; на фиг, 3 - разрез Б-В на фиг, 2; на фиг, 4 - разрез В-В на фиг, if на фиг,5 - вид Г на . фиг, 4; на фиг, б - разрез Д-Д на. фиг. If на фиг,- 7 - разрез В-Е на фиг, фиг. 8 - вид Ж на фиг,б, Устройство представляет собой раму 1 со смонтированными на ней цеп-: .ным конвейером 2 и двумя этажами пpиekникoв 3 под верхней 4 и шокней 5 горизонтальными ветвями. На тяге-вом цепном органе б закреплены шарнирно с определенным шагом каретки 7, перемещающиеся по направляющим J8 со ,смонтированными захватами 9, состоящими из верхнего 10 и нижнего 11. рычагов первого рода, соединенными между собой шарнирным звеном 12, На каретке также смонтирован на оси 13 набор адресных флажков 14 по общему количеству мест. На раме 1 смонтирован стол загрузки в виде рольганга 15 со встроенной в него подъемной платформой 16 для подачи листа 17 в захват 9, Длзг закрывания рычагов, захвата и прижати г . Гподаваемото листа, к эластичньп упог рам 18 далеются ролики 19. Подъем листа осуществляется с помощью механизма подъема пневмоцилиндра 20, Над местом загрузки в начале конвейера на раме смонтирован механизм 21 задачи адреса, вьшолненный в виде качающихся коромысел 22 на оси 23 до количеству мест сброса на казздой горизонтальной ветви, управляемых посредством- электромагнитов 24, Для возврата адресных флажков после сброса в исходное положение имеется для нижней ветви конвейера ролик 25, а для верхней ветви - ролик 26. Для раскрытия захвата 9 у определенного, места сброса (приемника) установлеш стационарно напротив соответствующего адресного флажка Г.-образный 27, имеющий ролик 28 для вза.имодействия с выступом 29 шарнирного параллелограмма. 30 ударника 31, На каретке 7 для. возврата ударника 31 в исходнсэе положение имеются ролики 32, Устройство работает следующим образом. Лист 17 подается по рольгангу 15 до упора. Одновременно по конвейеру 2 подается к столу загрузки каретка 7 с захватом 9 и останавливается по центру листа. Захвату задается адрес путем включения соответствующего электромагнита 24, который через .качающееся коромысло 22 воздействует на адресный флажок, ставя его с правым или левым наклоном соответственно для верхней или нижней ветви конвейера, Затем включается механизм подъема стола 20 и лист 17 подается вверх в захват до прижимных эластичных упоров 18. Одновременно ролики 19 взаимодействуют с рычагаг/ш 11 захвата, поджимая их к листу с помощью шарнирного звена 12, переходящего через поло жение мертв.ой точки, что обеспечйвает надежное захватывание листа. Лист зажатый захватом 9 каретки 7, с ад-it ресным флажком 14 в рабочем положении перемещается до соответствующего приемника 3, где адресный флажок 14 взаимодействует с Г-образным рачагом 27 который отклоняется., и ролик 28 выходит из зацепления с выступом 29. Подвижная сторона шарнирного параллелограмма 30 опускается, ударник 31 воздействует на рычаг 10 и рычаг 11 мгновенно падает, освобождая лист. который плавно ложится с высоты захвата на воздушной подушке в горизонтальное положение в приемник 3. Ударник 31 при дальнейшем движении каретки взаимодействует о роликом 32, который поднимает его до . исходного положения, когда ролик 28 Г-образного рычага 27 зайдет под упор 29. Мгновенное открывание захвата необходимое условие для плавного плоскопараллельного падения листа. Затем захват движется до ролика 25 или 26, которые возвращают адресные флажки в исходное горизонтальное положение, а захват идет к столу загрузок, готовый к принятию нового листа и задачи нового адреса. Предлагаемая конструкция обеспечивает надежное срабатывание захвата при сбросе, а набор адресных флажков в виде пластин, устанавливаемнлх с правым и левым наклоном соответственно этажности склада, обеспечивает увеличение количества приемников при той же производственной площади, снижает расход электроэнергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раскладки плоских предметов | 1980 |
|
SU906797A1 |
| Устройство для подачи и отбраковки упакованных предметов | 1987 |
|
SU1502421A1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ ЗАРУБНОЙ КОНВЕЙЕР | 2014 |
|
RU2574090C1 |
| УСТАНОВКА ДЛЯ ХРАНЕНИЯ И ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ИЗДЕЛИЙ | 1968 |
|
SU212125A1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| МНОГОПОТОЧНАЯ МЕХАНИЗИРОВАННАЯ ЛИНИЯ | 1970 |
|
SU283452A1 |
| Устройство для передачи грузов | 1989 |
|
SU1641744A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОВОРОТНЫМИ ЗАХВАТАМИ | 1967 |
|
SU216525A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПЛОСКИХ ПРЕДМЕТОВ, соде13жа1цее закрепленные шарнирно на тяговом орга/не бесконечного конвейера с возможностью перемещения по горизонтальным направляющим каретки, на каждой из которых установлены с возможностью поворота в вертикальной плоскости адресные флажки и соединенные между . собой шарнирно захваты,выполненные в виде размещенных под углом в верти..%ЙЛ0 fcЯHJF ЛГ-., . кальной плоскости рычагов первого рода, к нижней части каждой из которых прикреплены эластичные упоры для контакта с плечом нижнего рычага, укрепленные на кронштейнах ударники с возможностью взаимодействия каждого с верхним рымагом, размещённые под одной из ветвей бесконечного кон вейера приемники с хшорами, установленными с возможностью взаимодействия с адресными флажками, отличающееся тем, что, с целью увеличения производительности, оно. снабжено разманенными под другой ветвью бесконечного конвейера приемниками с упорами, причем упоры выпол нены в виде Г-образных рычагов с е опорными элементами, а ударники установлены у приемников и представляют собой шарнирные параллелограи1мы с BbiCTynavMH для взаимодействия с опорньп ш элементами Г-образных рычагов, причем адресные флажки установлены на общей оси и выполнены в виде коро мысла.
tZ 2
/tO:
Фиг.3
±JL
icte.«
/
Фиг.6
-E
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для сортировки лесных материалов | 1960 |
|
SU133405A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для раскладки плоских предметов | 1980 |
|
SU906797A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
