О
сд
а
о
42
4 Изобретение относится к дефектоскопии, а именнс) к ультразвуковой дефекто котш проката. Известна вращающаяся установка для сканирования труб ультразвуковыми датчиками с соленоид1ым механизмом позиционирования датчиков, которая пред.став пяет собой вращающуюся цилиндрическую раму, сквозь которую пропускают контро лируемую трубу. На внутренней поверхности рамы находятся две коподки с катуш ками-датчиками, которые с поммдью системы пружин и рычагов автоматически занимают положение максимально близкое и нормапьное к поверхности . В результате прямолинейного перемещения трубы и вращательнопэ движения рамы датчики cкa шpyют поверхность трубы по спирали с взаимно перекрыва1сацимися зонами сканирования. Подвод колодок с дат чиками к поверхности трубы и отвод от нее прсжзводится с помгацью рычажно-со- пеноидно Ромеханизма. Передача сигналов дефектов от датчиков на индикаторный прибор и питание соленоидов осуществпя- ются посредством, скопьаащих контактов Установка снабжена трубками для подачи контактной жидкости Cl J . Однако для известного устройства характерны громоздкость рамы, расхождение центров вращения рамы и системы рычагов при поперечных колебаниях трубы, вследствие чего меняется пололенив рычагов, вращаклций момент одного из них уменьшается, а другого увеличивается, что приводит к разбалансу вращающей системы, к биению и резкому уменьшению скорости и надежности контр ля. Цель изобретения - повышение произ- водительности и надежности устройства. Указанная цель достигается тем, что устройство снабжено установленным соос- но с рамой корпусом, в котором размеще ны трубки для подачи контак -ной лмдкос- ти, раме установлена с возможностью её вращения на корпусе и выполнена в виде турбинки с фасонным кольцом, лопатки которой располшены у выходного сопла трубки, а рычажная система выполнена в виде располсзжвнных по периметру рамы и соединенных между собой тросом роликов с установленными на них рычагами с датчик)а1ии и контргрузами. На фиг. 1 изображено предлагаемое устройство для контроля изделий круглого сечения, обший вид; на фиг. 2 - рычаж ная система датчиков. Устройство имеет турбинку 1 с фасон ным кольцом 2, корпус 3, рычаги 4 с роликами 5, датчиками 6 и контргрузами 7, сопла 8, пруияну 9, индукционный токо- съемщик Ю, трубки 11 и 12 с гибкими переходами 13, например шлангами, оси рычажных систем 14, соединенных с бинкой 1. фубки 11 н 12 с гибкими переходами 13 по принципу параллелограмма создают пантографное устройство, Кор пус 3 через трубки 11 и 12 гибко соединен с кольцеобразной станиной 15, в лопасть которой через штуцер 16 подается рабочая среда (вода, воздух). Турбин- ка 1 свободно вращается на корпусе 3 как на валу. Корпус 3 связан с гибким тросом 17. Мегвду соплами 8 н турбин- кой 1 располо ен отражатель 18. На ро- ПИКИ 5 намотан гибкий трос 19, Устройство работает следующим обраafOM. Пока контролируемой трубы нет, рычажная система с псяиошью пружинь 9 находится в разведенном состоянии. Корпус 3 с турбинкой 1 и рычажной системой с помощью прузданы 9 находится в крайнем положении. Верхнее полсакение j фиксируется с помощью гибкого троса 3.7, Это фиксированное попоз№ние нужно подобрать так, чтобы трубы Максимального диаметра были отцентрованы по отноигению к корпусу 3. В таком случае труба большого диаметра (а труба малого диамет ра тем более) благодаря ,конусности корпуса 3 и гибкому соединению со станиной 15 легко заходит внутрь рычажной системы, после чего включается насос, который подает воду через штуцер 16 в полость станины От станины 15 зшдкость через трубки 12 и гибкие переходы поступает в полость корпуса 3 для создания гиаропоцушки меяцу корпусом 3 и турбинкой 1. На этой подушке вращается турбинка 1 вместе с кольцом 2. Одно- временно воца через трубки 11 поступает iK соплам 8. Струя воцы от сопел 8 по- дается на турбинку 1 и приводит ее во ращение. Огражатега 18 спуиит для изменения направления струи и тем самым осуществлятся реверс вращения турбин- ки. В начале она вращается по часовой стрелке. Благодаря центробежным силам рачажная система поворачивается против часовой стрелки и датчики 6, которые . висят свободно на остриях рычагов 4, с помоцью пруж1н(не показаны) прп шмаются к изделию.
Таким образом, оатчвкп 6 прижимаются к поверхнсюти взпёлня с помощью центробежных свл. Свнхроинос1ъ поворота рычагов сохраняется с помсяпью гибкого троса 19, - который намотан на ролики в ошн виток в 5 надежно с ним стторнтся стопорным ввитом (не показан). Всю нагрузку иентробе в 1х сип стальной трос принимает на ceGsu Датчики 6 имеклг нлоскбе цно. При &ICTром авихении этих плоскостей вокруг тру-Ю €ы, поверхность которой покрыта споем всоы, благоааря сопротивлению набега1й шего слоя воцы происхоцит глнссировап1е. Между дном датчиков и тру6ой совдается гидравлическая подушка. поперечном 15 колебании контролируемой тру (ялчажная система, которая вроцается вокруг тру- AI как на Banff колеблется вместе с этой трубо |Ц при этом плоскость вращетя рычажной системы не меняется (благодаря20 пантографному устройству), вследствие чего устраняется перекос датчиков.
При подходе яонаа трубы с помощью отрагттеля 18 осушествл51ется реверс
турбигы 2 в происходит торможение, бпа14 ааря чему рычажная система начинает поворачиваться по часовой стрепке ( рев- ведение рычагов). После этого устройство готово ОЛЯ принятия следукшей трубы. Таким образом, турбинка 1 с рычажной системой врешается как на валу: в рабочем режиме-вокруг контролируемсяч) изделия, а в нерабочем - вокруг корпуса 3; в обоих случаях на гидропоаушке, в первом на гидродинамической, а во втором иа гидростатической.
Использоваше предлагаемого устройства для контроля иадетй круглого сече ния обеспечивает по сравнешю с известными уветчение олхода годной продук -. ции : Р.путем более точного (Мфеделетя дефектных участков, сокроценве обрев устранете трубсгфотяжяых мехатам для стабияизании и nepeMemeigui иаоваяй во время проверки, сок)авенве колкчества контролер ватмакщихса ввэзгапьвым осмотром изделий
Фиг

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отрезки стеклянных трубок | 1957 |
|
SU123676A3 |
| Устройство для зачистки поверхности проката | 1980 |
|
SU941050A1 |
| Устройство для контроля трубопроводов | 1974 |
|
SU739395A1 |
| УПЛОТНЯЮЩЕЕ УСТРОЙСТВО ПЕЧИ1 ,^ •ТГ^{L5 V I I ^1"^i1р;\лцг? '^?./?и^-;птПЧ iVUlJ.4 V. .i*J<i-i а UU i | 1972 |
|
SU422780A1 |
| Устройство для передачи изделий с одного транспортера на другой | 1978 |
|
SU700397A1 |
| Автомат для перфорирования керамических труб | 1982 |
|
SU1080986A1 |
| Подвесная тележка | 1981 |
|
SU1011491A1 |
| Устройство для установки заготовок в пресс | 1988 |
|
SU1523233A1 |
| Железнодорожный путеизмеритель | 1939 |
|
SU59481A1 |
| Электрогидравлическая система | 1989 |
|
SU1779805A1 |
УСТРОЙСТВО ДЛЯ СКАНИРО ВАНИЯ УЛЬТРАЗВУКОВЫМИ ДАТЧШСАМИ ИЗДЕЛИЙ КРУГЛОГО СЕЧЕНИЯ, соkSpsK.aa.ee вроцаюыуюся раму с уставов Пенной на ней рычажной снстемоА с ааегчвками н трубки цпя подачи контактвЬЙ явпкостй, отпнчающееся тем, что, с цепью увеянчения надежности н произвадительносяги контроля, оно снабавно установпеняим соосно с роиой корпусом, в котором-размещены трубки цля поца«в KOHteacTHOt яицкостн, рама установ.- лева с вовмфкжхтгыо ее ещенвв на кор лусе я шпояяены в виде турбншш с фасонным кольцом, попатки которой расцо поиены у a xooBoro сопла Tpyi6kH, а рычажная система выполнена в ввце располшенилх но периметру ремы и со,еаине ных ме:кду собой тросом роликов с установленными на них рычагами с цатчикймн и контргрузами.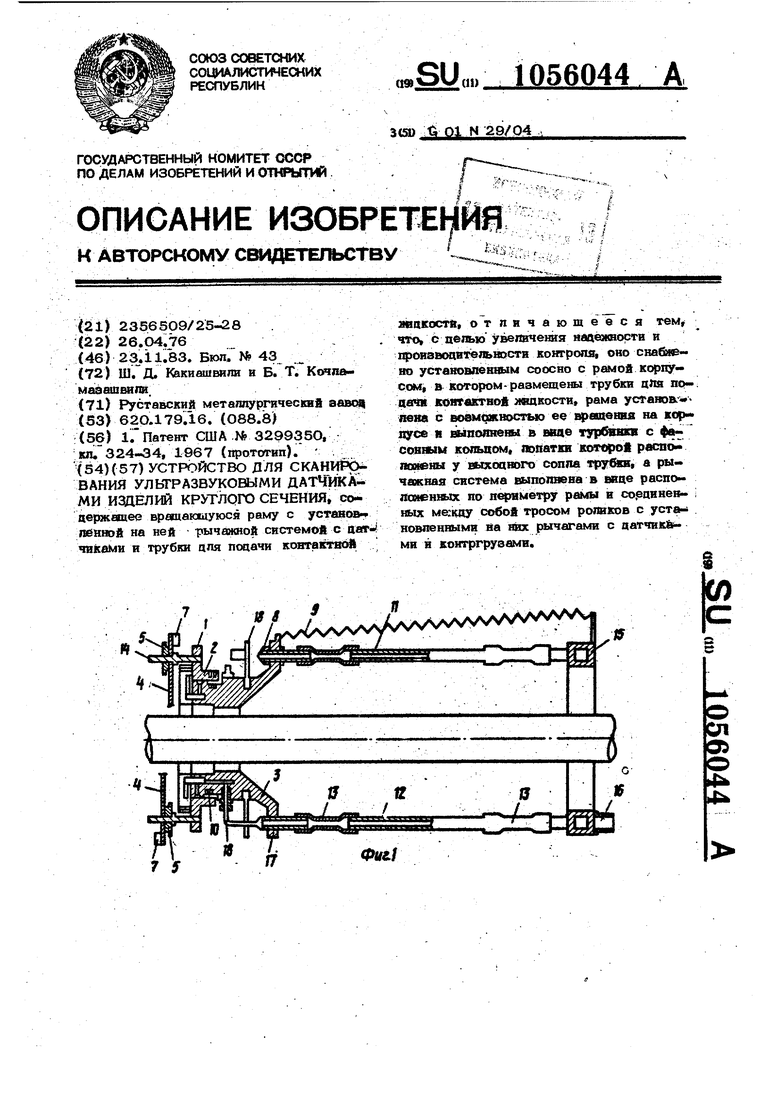
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU329935A1 |
