Ijf L««
CD
Изобретение относится к транспортной технике и может быть использовано в автоматизированных производственных комплексах для транспортирования изделий и передачи их на обрабатывающее оборудование и от него.
Цель изобретения - расширение технологических возможностей путем проведения загрузочно-разгрузочных операций на технологическом оборудовании, имеющем прием- вые позиции, расположенные на различном Ю уровне.
На фиг. 1 показана транспортная тележка, положение перед перегрузкой изделия ; на приемную позицию; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на : фиг. 2 (положение эксцентриковых кулач- - i ков приподнятое); на фиг. 4 - сечение Б-Б ; на фиг. 1; на фиг. 5 - вид В на фиг. 1; на ; фиг. 6 - узел I на фиг. 1; на фиг. 7 - ; узел И на фиг. 1.
Устойчивое положение передаточного органа 4 фи движении тележки в продольном направлении обеспечивается кронштейнами 30, свободно охватывающими оси 17 и 18 и имеющими вертикальные пазы. Упор 31 служит ограничителем поперечного перемещения передаточного органа 4.
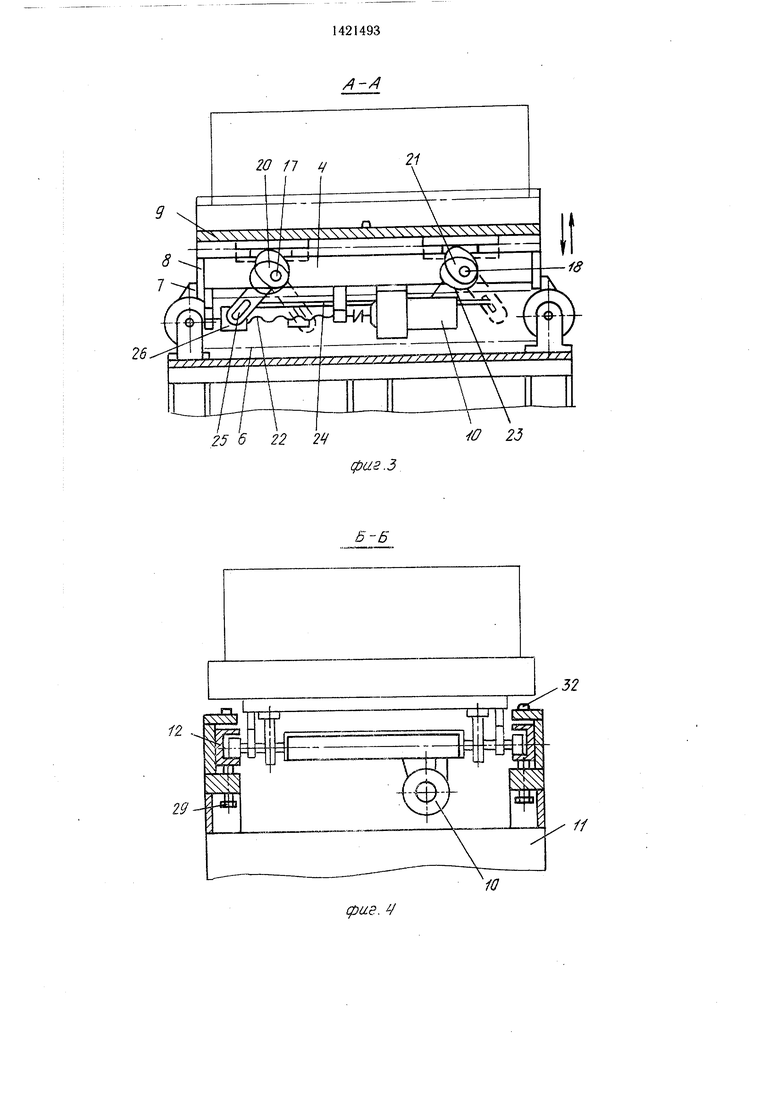
Для точной передачи и фиксирования положения приспособлений-спутников с деталями на передаточном органе 4 и приемных позициях 11 имеются конусные фиксаторы 32, взаимодействующие с конусными втулками 33 приспособлений-спутников.
Транспортная система работает следующим образом.
Тележка 1 перемещается по рельсовой трассе и останавливается у приемной позиции 11. Включается привод 14, направляющие 3 при помощи рычажного механизма 15 поднимаются до уровня направляющих 12 приемной позиции 11. При этом боТранспортная система включает рельсо- 20 кавые ролики 16 перемещаются вверх по вую тележку 1 с приводом 2. На корпусе вертикальным направляющим 13, установ- тележки 1 расположены направляющие 3 для перемещения по ним передаточного органа 4.
ленным на тележке 1, до момента взаимодействия выключателя 27, установленного на направляющих 3, с упором 28 (фиг. 6) на направляющих 12 приемной позиции П. Включается винтовой привод 10 вертикального перемещения подъемного столика 9 с установленным на нем грузом. Через гайку 26, связанный с ней рычаг 22, в котором выполнен паз 25, поворачиваются эксцентриковые кулачки 20 и 21, поднимая
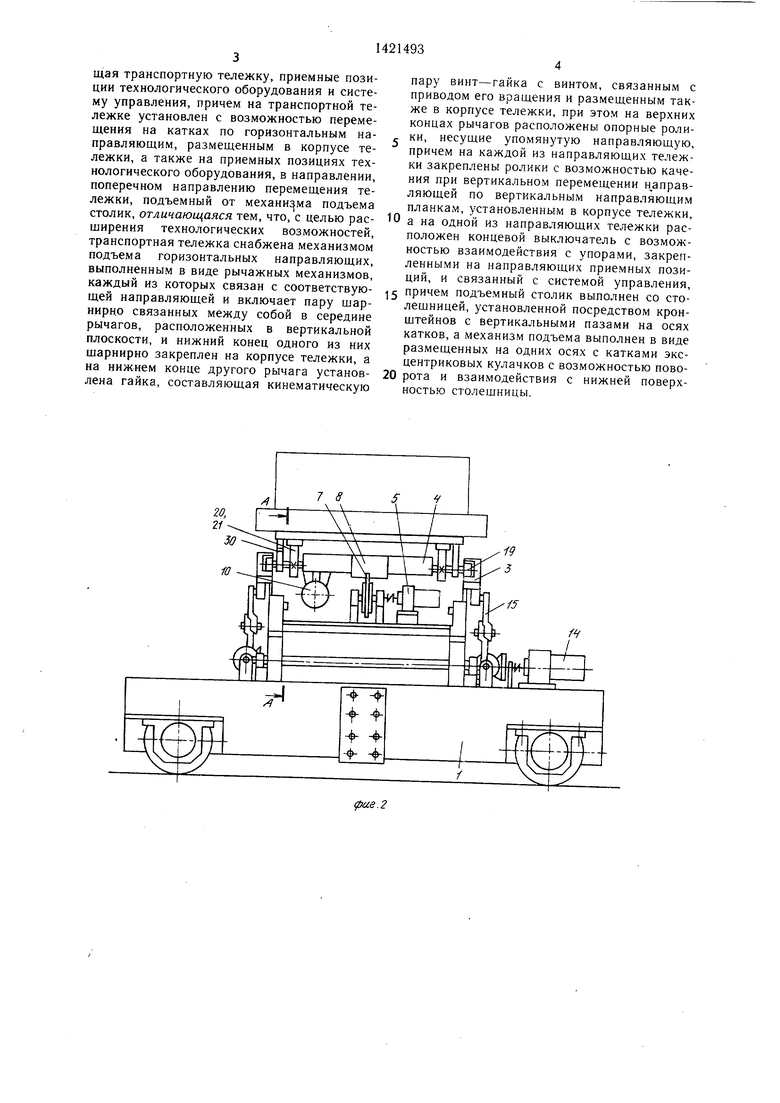
Передаточный орган 4 выполнен в виде площадки с приводом 5 горизонтального перемещения посредством цепной передачи 6 (фиг. 3), на которой имеются толкатели 7, воздействующие на козырьки 8, закрепленные на площадке. Подъемный столик 9 передаточного органа 4 снабжен винтовым
приводом 10 вертикального перемещения. подъемный столик 9.
ленным на тележке 1, до момента взаимодействия выключателя 27, установленного на направляющих 3, с упором 28 (фиг. 6) на направляющих 12 приемной позиции П. Включается винтовой привод 10 вертикального перемещения подъемного столика 9 с установленным на нем грузом. Через гайку 26, связанный с ней рычаг 22, в котором выполнен паз 25, поворачиваются эксцентриковые кулачки 20 и 21, поднимая
На приемкой позиции и технологического оборудования выполнены горизонтальные направляющие 12.
Тележка 1 снабжена вертикальными направляющими 13, установленными в нижней
Включается реверсивный привод 5 горизонтального перемещения, приходит в действие цепная передача 6, а ее толкатель 7, упираясь в козырек 8, перемещает передаточный орган 4 по направляющим 3, а зачасти рельсовой тележки 1 с целью пере- тем по направляющим 12 приемной позиции меп;е 1ия по ним направляющих 3 до уров- 11 до упора 31. ня направляющих 12 встречной приемной позиции 11. Для этого предусмотрен привод 14, винтовая передача, с которой связан
Затем включается привод 10 и подъемный столик 9 при помощи эксцентриковых кулачков 20 и 21 опускается, оставляя
рычажный механизм 15, контактирующий с 40 груз, например, приспособление-спутник, на направляющими 3, на которых установлены приемной позиции 11. При этом конусные боковые ролики 16 с опорой на вертикальные направляющие планки 13.
Передаточный орган 4 смонтирован на осях 17 и 18, опирается на катки 19 и несет на себе подъемный столик 9, взаимо- 45 действующий нижней поверхностью столешницы с эксцентриковыми кулачками 20 и 21, жестко связанными с рычагами 22 и 23, соединенными тягой 24. Подъем столика 9
осуществляется за счет выполненного в рыча-,,j,,. . . .„,... ..„....,.,-. .„
ге 22 паза 25, взаимодействующего с паль- - направляющие 3 опускаются в исходное по- цем гайки 26 винтового привода 10. ложение. Тележка 1 адресуется к другому
Ограничителем вертикального перемеще- оборудованию (накопителю), с которого взя- ния направляющих 3 служит концевой вы- тие груза производится в обратном порядке. ключатель 27 (фиг. 6), установленный сТележка 1 работает как в левую, так и
возможностью взаимодействия с упором 28, 55 в правую стороны. Все команды передаются расположенным на направляющих 12 прием-на тележку 1 системы управления.
ной позиции 11. Для настройки по высотеФормула изобретения
паправляющих 12 они снабжены регулиро-Транспортная система автоматизированвочными винтами 29 (фиг. 4).ного производственного комплекса, содержафиксаторы 32 подъемного столика 9 выходят из зацепления со спутником, он садится на конусные фиксаторы 32 приемной позиции 11.
Реверсом привода 5 передаточный орган 4 возвращается на направляющие 3 рельсовой тележки 1. Остановка его осуществляется при помощи конечных выключателей и тормоза в приводе 5 (не показаны).
При помощи рычажного механизма 1-5
Устойчивое положение передаточного органа 4 фи движении тележки в продольном направлении обеспечивается кронштейнами 30, свободно охватывающими оси 17 и 18 и имеющими вертикальные пазы. Упор 31 служит ограничителем поперечного перемещения передаточного органа 4.
Для точной передачи и фиксирования положения приспособлений-спутников с деталями на передаточном органе 4 и приемных позициях 11 имеются конусные фиксаторы 32, взаимодействующие с конусными втулками 33 приспособлений-спутников.
Транспортная система работает следующим образом.
Тележка 1 перемещается по рельсовой трассе и останавливается у приемной позиции 11. Включается привод 14, направляющие 3 при помощи рычажного механизма 15 поднимаются до уровня направляющих 12 приемной позиции 11. При этом бо кавые ролики 16 перемещаются вверх по вертикальным направляющим 13, установ-
кавые ролики 16 перемещаются вверх по вертикальным направляющим 13, установ-
подъемный столик 9.
ленным на тележке 1, до момента взаимодействия выключателя 27, установленного на направляющих 3, с упором 28 (фиг. 6) на направляющих 12 приемной позиции П. Включается винтовой привод 10 вертикального перемещения подъемного столика 9 с установленным на нем грузом. Через гайку 26, связанный с ней рычаг 22, в котором выполнен паз 25, поворачиваются эксцентриковые кулачки 20 и 21, поднимая
подъемный столик 9.
Включается реверсивный привод 5 горизонтального перемещения, приходит в действие цепная передача 6, а ее толкатель 7, упираясь в козырек 8, перемещает передаточный орган 4 по направляющим 3, а затем по направляющим 12 приемной позиции 11 до упора 31.
груз, например, приспособление-спутник, на приемной позиции 11. При этом конусные
,,j,,. . . .„,... ..„....,.,-. .„
направляющие 3 опускаются в исходное по- ложение. Тележка 1 адресуется к другому
фиксаторы 32 подъемного столика 9 выходят из зацепления со спутником, он садится на конусные фиксаторы 32 приемной позиции 11.
Реверсом привода 5 передаточный орган 4 возвращается на направляющие 3 рельсовой тележки 1. Остановка его осуществляется при помощи конечных выключателей и тормоза в приводе 5 (не показаны).
При помощи рычажного механизма 1-5
щая транспортную тележку, приемные позиции технологического оборудования и систему управления, причем на транспортной тележке установлен с возможностью перемещения на катках по горизонтальным направляющим, размещенным в корпусе тележки, а также на приемных позициях технологического оборудования, в направлении, поперечном направлению перемещения тележки, подъемный от механизма подъема столик, отличающаяся тем, что, с целью расширения технологических возможностей, транспортная тележка снабжена механизмом подъема горизонтальных направляющих, выполненным в виде рычажных механизмов, каждый из которых связан с соответствующей направляющей и включает пару щар- нирно связанных между собой в середине рычагов, расположенных в вертикальной плоскости, и нижний конец одного из них щарнирно закреплен на корпусе тележки, а на нижнем конце другого рычага установлена гайка, составляющая кинематическую
0
пару винт-гайка с винтом, связанным с приводом его вращения и размещенным также в корпусе тележки, при этом на верхних концах рычагов расположены опорные ролики, несущие упомянутую направляющую, причем на каждой из направляющих тележки закреплены ролики с возможностью качения при вертикальном перемещении н.аправ- ляющей по вертикальным направляющим планкам, установленным в корпусе тележки, а на одной из направляющих тележки расположен концевой выключатель с возможностью взаимодействия с упорами, закрепленными на направляющих приемных позиций, и связанный с системой управления,
5 причем подъемный столик выполнен со столешницей, установленной посредством кронштейнов с вертикальными пазами на осях катков, а механизм подъема выполнен в виде размещенных на одних осях с катками эксцентриковых кулачков с возможностью пово0 рота и взаимодействия с нижней поверхностью столешницы.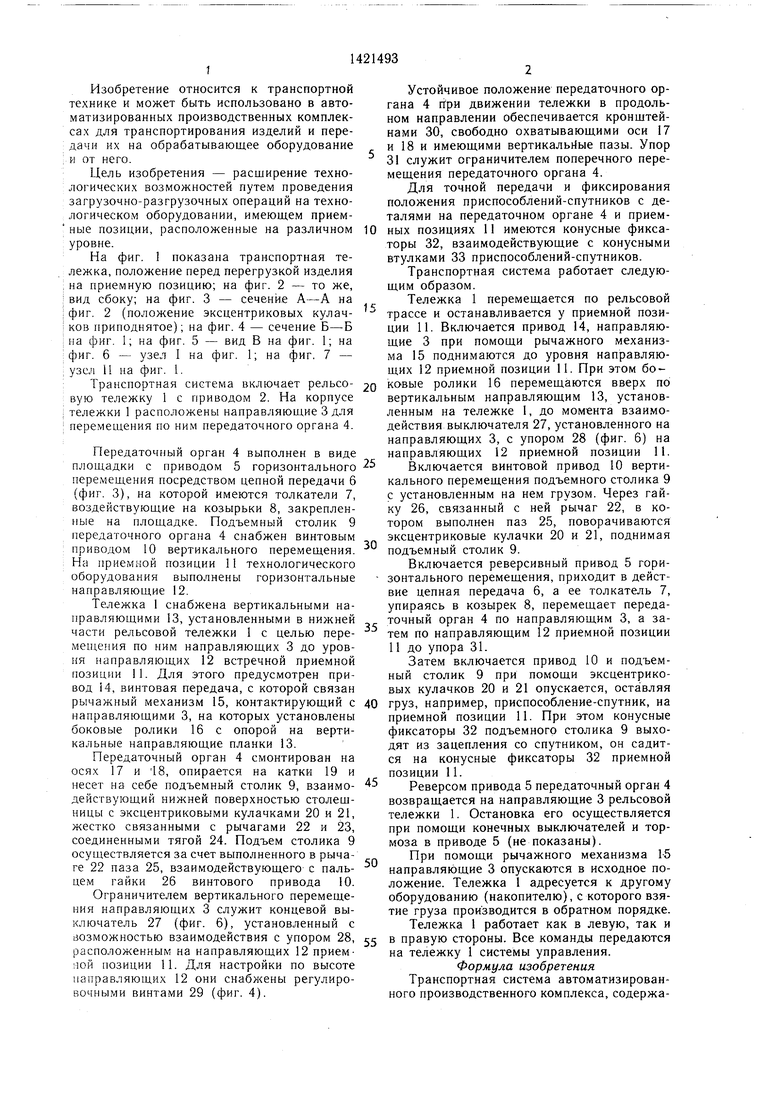
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Транспортно-накопительная система | 1986 |
|
SU1414563A1 |
| Тележечный конвейер | 1985 |
|
SU1316934A1 |
| Автомат для садки кирпича на печные вагонетки | 1983 |
|
SU1104023A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Устройство для перегрузки изделий | 1986 |
|
SU1395571A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СБОРКИ ЗВЕНЬЕВ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2373320C1 |
| Передаточное устройство подвесного конвейера | 1980 |
|
SU958274A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ИНЕРЦИОННАЯ СИСТЕМА | 2017 |
|
RU2691682C1 |
Изобретение относится к транспортной технике. Цель изобретения - расширение технологических возможностей за счет автоматизации транспортных операций в комплексах, составленных из технологического ооорудования с разновысотными приемными позициями. Система содержит рельсовую тележку 1 с направляющими 3, передаточный орган 4, выполненный с возможностью горизонтального пере.мещения по направляющим 3, установленный на нем подъемный столик 9 с возможностью перемещения в вертикальной плоскости и приемные позиции I технологического оборудования с направ- ляющи.ми 12. Тележка I имеет вертикальные направляющие i3, по которым могут перемещаться направляющие 3 до уровня на- правляющи.х 12. Кроме того, передаточный орган 4 установлен на осях 17, 8, кинематически связанных с приводом подъема подъемного столика 9, а направляющие 3 снабжены выключателем 27, взаимодействующим с упором 28 на направляющих 12. 7 ил. с SP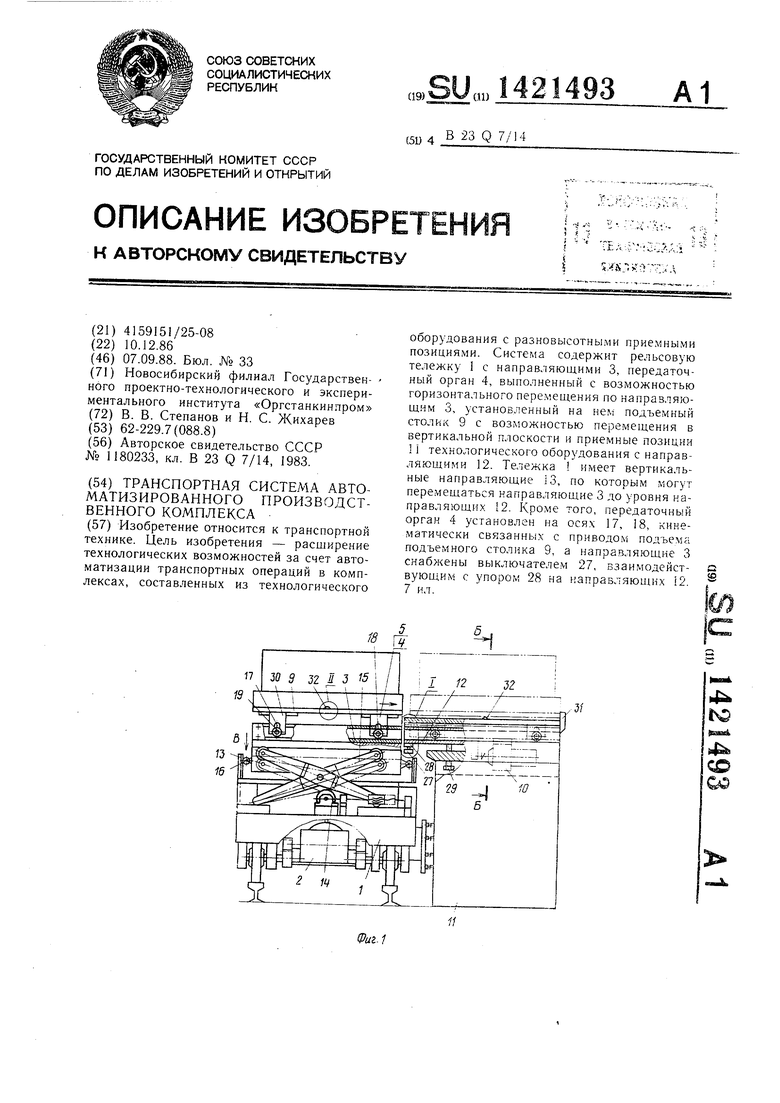
20, 21
/
(pas. Ч
фаг.5
Bad В
{pae.S
фаз. 6
фие. 7
| Приемно-передаточное устройство и транспортно-накопительная система поточной линии | 1983 |
|
SU1180233A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
