;4
А(Л
4; 4 -ч
Од 4:
нал линия содержит несинхронную горизонтально замкнутую транспортно-на- копительную систему с основной ветвью, связанной с параллельными ей дополнительными ветвями поперечными транспортирующими устройствами. На дополнительных ветвях в любой последовательности расположены технологические станции. Спутник 5 снабжен адресоносителем, выполненным в виде блока кулачков 7, размещенных на оси ,в шахматном порядке. Каждый кулачок
имеет три рабочие поверхности. На основной ветви транспортной системы расположены считывающие устройства. Механизм фиксации спутников на технологических ячейках выполнен в виде двух параллельных платформ: верхней 16 и нижней 21, на которой размещен механизм перекодирования спутников 5, выполненный в виде попарно разновысоких кодирующих штырей 25 и 26 и попарно равновысоких декодирующих штырей 27. 7 ил.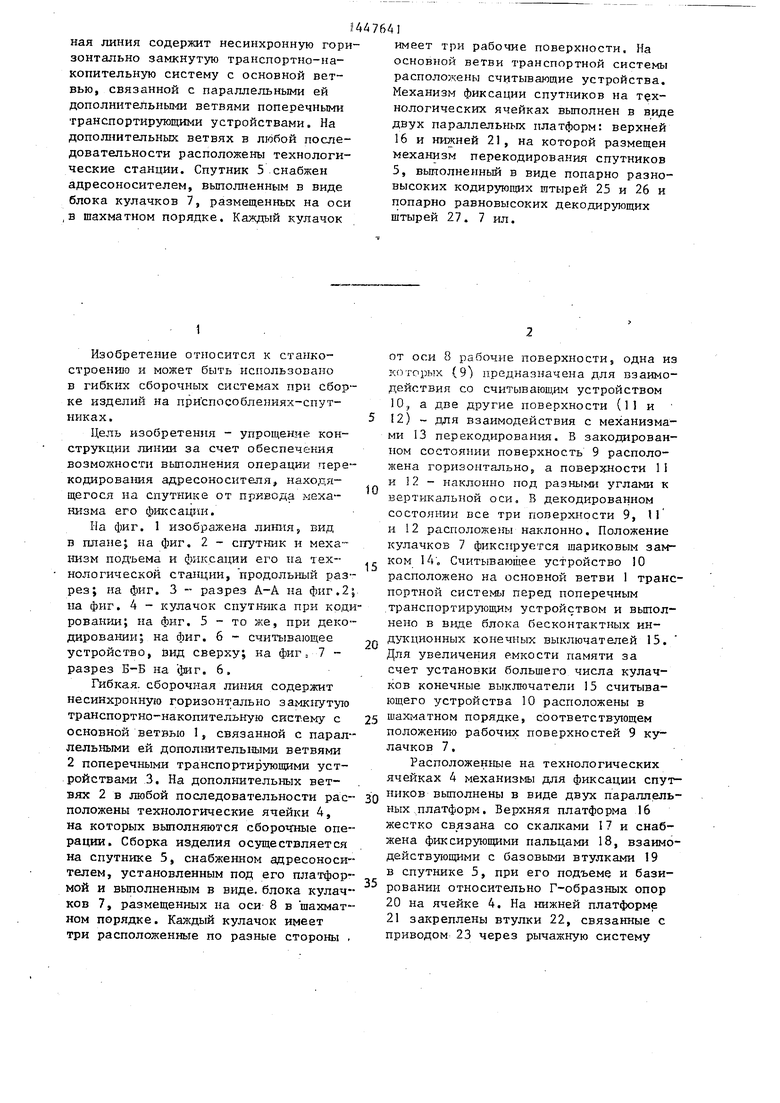
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Сборочная линия | 1983 |
|
SU1121127A1 |
| Горизонтально-замкнутый распределительный конвейер | 1979 |
|
SU856941A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1299772A1 |
| СБОРОЧНАЯ ЛИНИЯ | 1991 |
|
RU2028910C1 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Автоматическая сборочная линия спутникового типа | 1986 |
|
SU1346384A1 |
| КОМПЛЕКС СБОРКИ ШАТУННО-ПОРШНЕВОЙ ГРУППЫ | 2013 |
|
RU2548843C2 |
| Транспортная система гибкой автоматической спутниковой линии | 1986 |
|
SU1425047A1 |
| Способ сборки изделий на автоматизированной сборочной линии спутникового типа | 1991 |
|
SU1808642A1 |
Изобретение относится к станкостроению и может быть использовано в гибких сборочных системах. Цель изобретения - упрощение конструкции за счет обеспечения возможности выполнения операций перекодирования ад- ресоносителя спутника от привода механизма его фиксации. Гибкая сбороч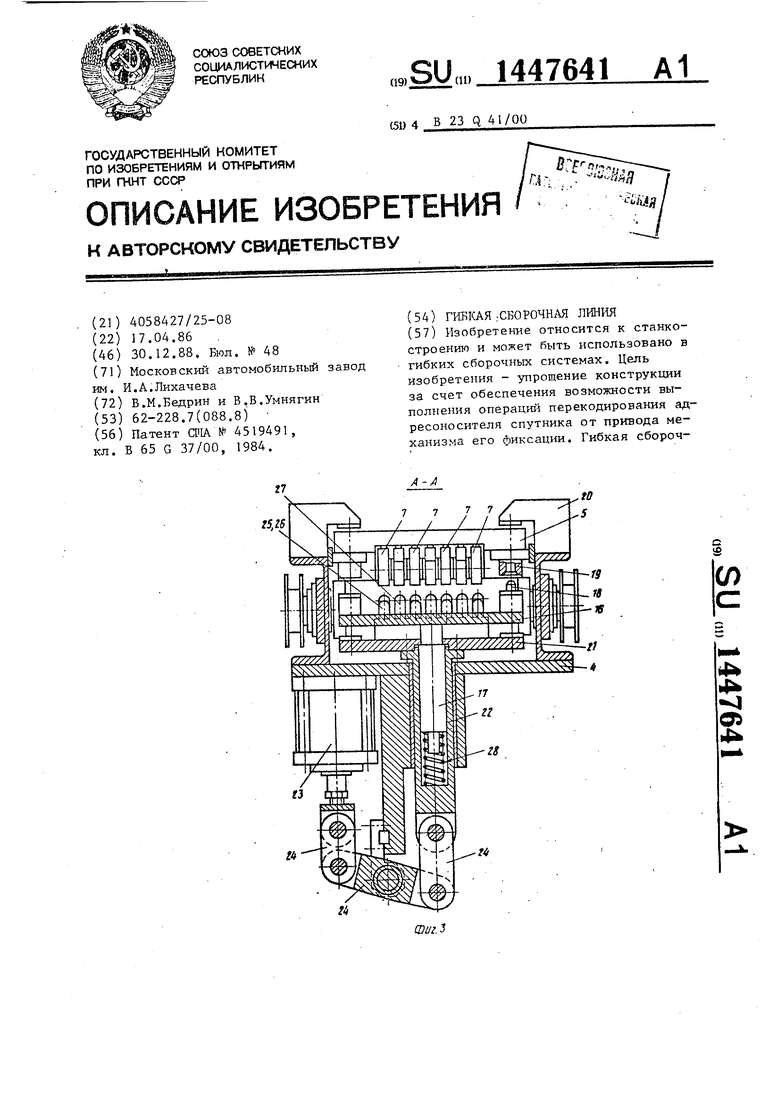
1
Изобретение относится к станкостроению и может быть использовано в гибких сборочных системах при сборке изделий на приспособлениях-спутниках.
Цель изобретения - упрощение конструкции линии за счет обеспечения возможности выполнения операции перекодирования адресоносителя, находящегося на спутнике от привода механизма его фш :сации.
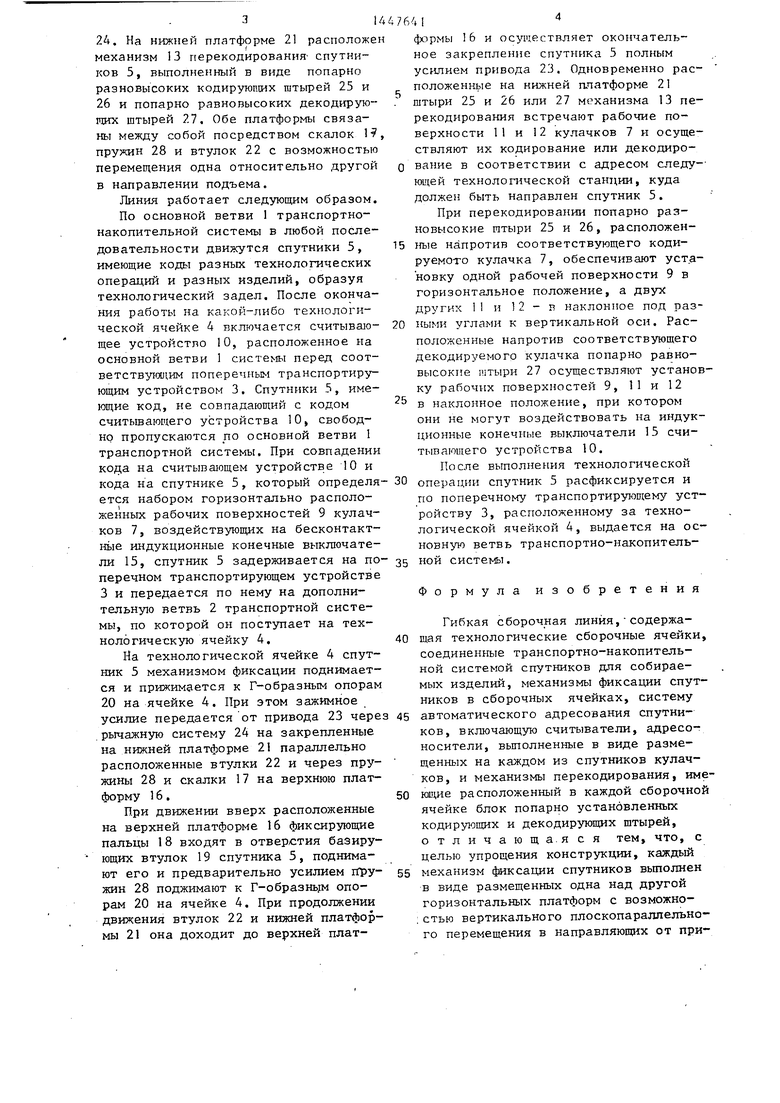
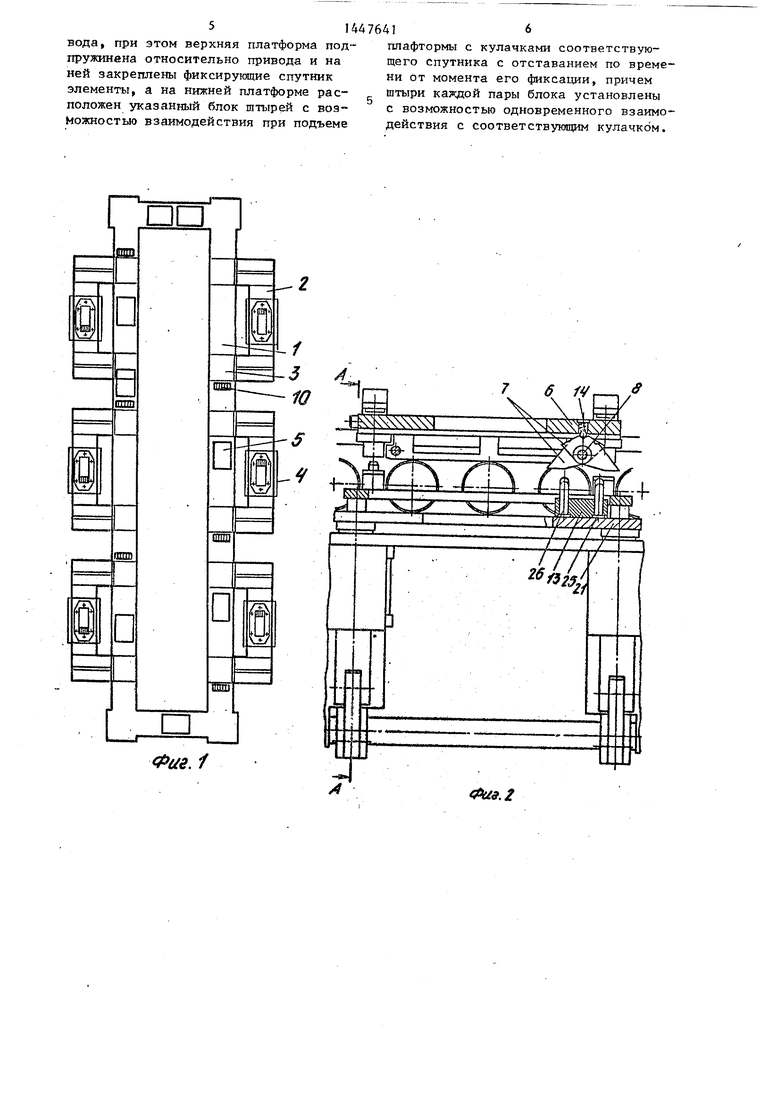
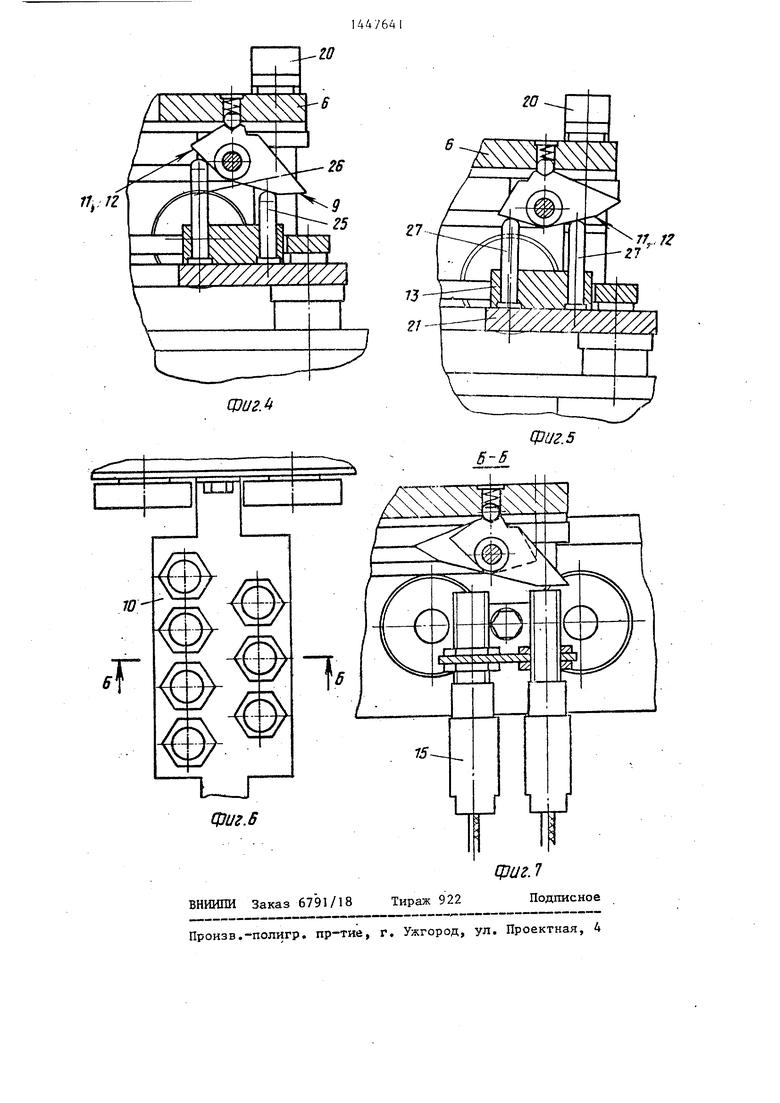
На фиг. 1 изображена лигаш, вид в плане; на фиг. 2 - спутник и механизм подъема и фиксации его па технологической станции, продолы-Еый раз-рез; на фиг. 3 - разрез А-А на фиг.2; на фиг. 4 - кулачок спутника при кодировании; на фиг. 5 - то же, при декодировавши; на фиг. б считешающее устройство, вид сверху; на фиг 7 - разрез Б-Б на (иг. 6.
Гибкая, сборочная линия содержит несинхронную горизонтально замкнутую траиспортно-накопительную систему с основной ветвью 1, связанной с параллельными ей дополнительными ветвями 2 поперечными транспортирующими устройствами 3. На допол штельных ветвях 2 в любой последовательности расположены технологические ячейки 4, на которых выполняются сборочвые операции. Сборка изделия осуществляется на спутнике 5, снабженном адресоноси- телам, установленным под его платформой и выполненным в виде, блока кулачков 7, размещенных на оси 8 в шахматном порядке. Каждый кулачок имеет три расположенные по разные стороны .
от оси 8 рабочие поверхности, одна из которых (9} предназначена для взаимодействия со считывающим устройством 10, а две другие поверхности (П и 12) - для взаимодействия с механизмами 13 перекодирования. В закодированном состоянии поверхность 9 расположена горизонтально,, а поверхности 11 и 12 - наклонно под разными углами к вертикальной оси. В декодированном состоянии все три поверхности 9, 11 и 12 расположены наклонно. Положение кулачков 7 фиксируется шариковым замком 14„ Считывающее устройство 10 расположено на основной ветви 1 транспортной системы перед поперечным .транспортирующим устройством и выполнено в виде блока бесконтактных индукционных конечных выключателей 15. Для увеличения емкости памяти за счет установки большего числа кулачков конечные выключатели 15 считывающего устройства 10 расположены в шахматном порядке, соответствующем положению рабочих поверхностей 9 кулачков 7.
Расположенные на технологических ячейках 4 механизмы для фиксации спутников вьшолнены в виде двух параллельных платформ. Верхняя платформа 16 жестко связана со скалками 17 и снабжена фиксирующими пальцами 18, взаимодействующими с базовыми втулками 19 в спутнике 5, при его подъеме и базировании относительно Г-образных опор
20на ячейке 4. На нижней платформе
21закреплены втулки 22, связанные с приводом 23 через рычажную систему
3
2Д. На нижней платформе 21 расположе механизм 13 перекодирования спутников 5, выполненный в виде попарно разновысоких кодируюпих штьфей 25 и 26 и попарно разновысоких декодирующих штырей 27. Обе платформы связаны между собой посредством скалок Н пружин 28 и втулок 22 с возможностью перемещения одна относительно другой в направлении подъема.
Линия работает следующим образом.
По основной ветви 1 транспортно- накопительной системы в любой последовательности движутся спутники 5, имеющие коды разных технологических операций и разных изделий, образуя технологический задел. После окончания работы на какой-либо технологической ячейке 4 включается считывающее устройство 10, расположенное на основной ветви 1 системы перед соот- ветствутсщим поперечным транспортирующим устройством 3. Спутники 5, имеющие код, не совпадающий с кодом считывающего устройства 10, свободно пропускаются по основной ветви 1 транспортной системы. При совпадении Ko;:i,a на считывающем устройстве 10 и кода на спутнике 5, который определяется набором горизонтально расположенных рабочих поверхностей 9 кулачков 7, воздействующих на бесконтакт- Hbie индукционные конечные выключатели 15, спутник 5 задерживается на поперечном транспортирующем устройстве 3 и передается по нему на дополнительную ветвь 2 транспортной системы, по которой он поступает на технологическую ячейку 4.
На технологической ячейке 4 спутник 5 механизмом фиксации поднимается и прижимается к Г-образным опорам 20 на ячейке 4. При этом зажимное усилие передается от привода 23 чере рычажную систему 24 на закрепленные на нижней платформе 21 параллельно расположенные втулки 22 и через пружины 28 и скалки 17 на верхнюю платформу 16.
При движении вверх расположенные на верхней платформе 16 фиксирующие пальцы 18 входят в отвер/стия базирующих втулок 19 спутника 5, поднимают его и предварительно усилием гфу- жин 28 поджимают к Г-образнь}м опорам 20 на ячейке 4. При продолжении движения втулок 22 и нижней платформы 21 она доходит до верхней плат
формы 16 и осуществляет окончательное закрепление спутника 5 полным усилием привода 23. Одновременно расположенные на нижней платформе 21
штыри 25 и 26 или 27 механизма 13 перекодирования встречают рабочие поверхности 11 и 12 кулачков 7 и осуществляют их кодирование или декодиро- вание в соответствии с адресом следу-- ющей технологаческой станции, куда должен быть направлен спутник 5.
При перекодировании попарно разновысокие ттыри 25 и 26, расположенные напротив соответствующего коди- руемото кулачка 7, обеспечивают установку одной рабочей поверхности 9 в горизонтальное положение, а двух других 11 и 12 - в наклонное под разными углами к вертикальной оси. Расположенные напротив соответствующего декодируемого кулачка попарно равно- высокие 11тыри 27 осуществляют установку рабочих поверхностей 9, 11 и 12 в наклонное положение, при котором они не могут воздействовать на индукционные конечные выключатели 15 считывающего устройства 10.
После выполнения технологической
операции спутник 5 расфиксируется и по поперечному транспортирую0;ему устройству 3, расположенному за технологической ячейкой 4, выдается на основную ветвь транспортно-накопительной системы.
Формула изобретения
Гибкая сборочная линия,содержащая технологические сборочные ячейки, соединенные транспортно-накопитель- ной системой спутников для собираемых изделий, механизмы фиксации спутников в сборочных ячейках, систему
автоматического адресования спутников, включающую считыватели, адресо- носители, выполненные в виде размещенных на каждом из спутников кулачков, и механизмы перекодирования, имеюьцие расположенный в каждой сборочной ячейке блок попарно установленных кодирующих и декодирующих штырей, отличающа.я ся тем, что, с целью упрощения конструкции, каждый
механизм фиксации спутников вьшолнен в виде размещенных одна над другой горизонтальных платформ с возможно- стью вертикального плоскопаралпелъно- го перемещения в направляющих от при-
вода, при этом верхняя платформа подпружинена относительно привода и на ней закреплены фиксирующие спутник элементы, а на нижней платформе расположен указанный блок штырей с возможностью взаимодействия при подъеме
ГппП
Фие. /
гшафтормы с кулачками соответствующего спутника с отставанием по времени от момента его фиксации, причем штыри казкдой пары блока установлены с возможностью одновременного взаимодействия с соответствующим кулачком.
7 / /.
г
Щ
2/
.2
10
S
26
Ц}иг.
Фиг, В
фиг.7
ВНИИПИ Заказ 6791/18 Тираж 922 Подписное
zo
27Фиг. 5
| Патент CUIA № 4519491, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
