10 и12
Л / . /
/9
iL
13 W
I , I
27 ,7
/ I
сл
oS
jv «
Изобретение относится к машиностроению и может быть использовано в конструкциях захватных органов промышленных роботов.
Целью изобретения является повышение надежности за счет центрирования детали на схвате.
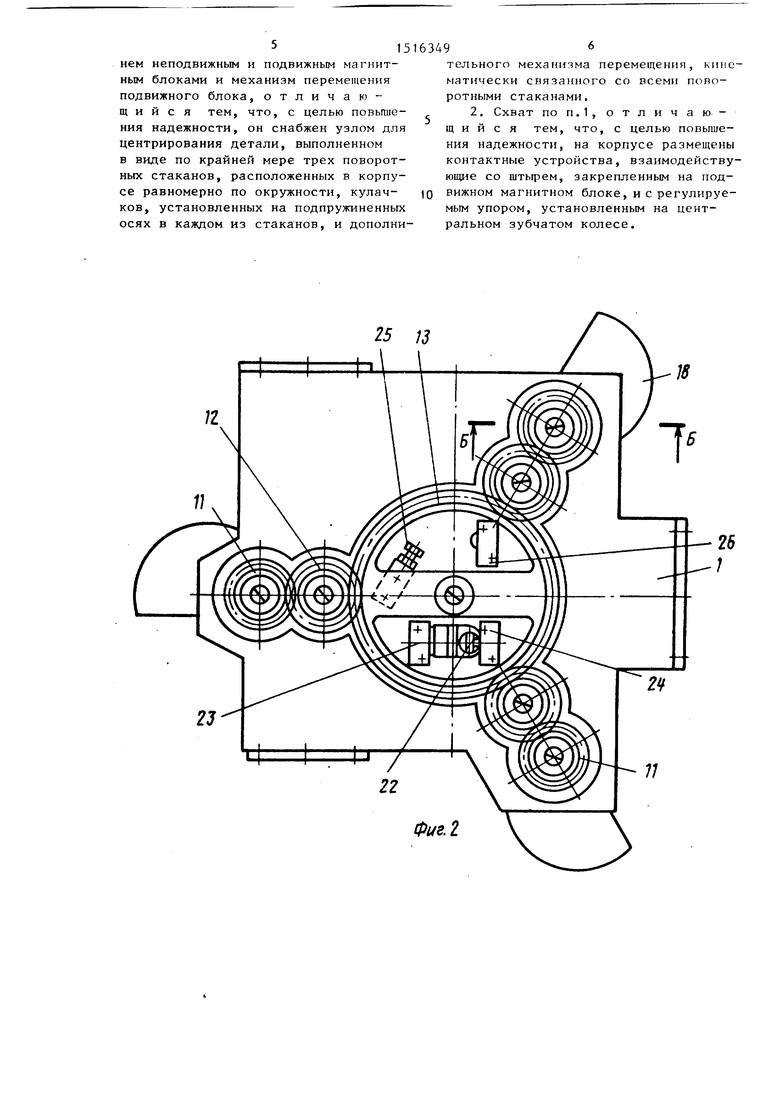
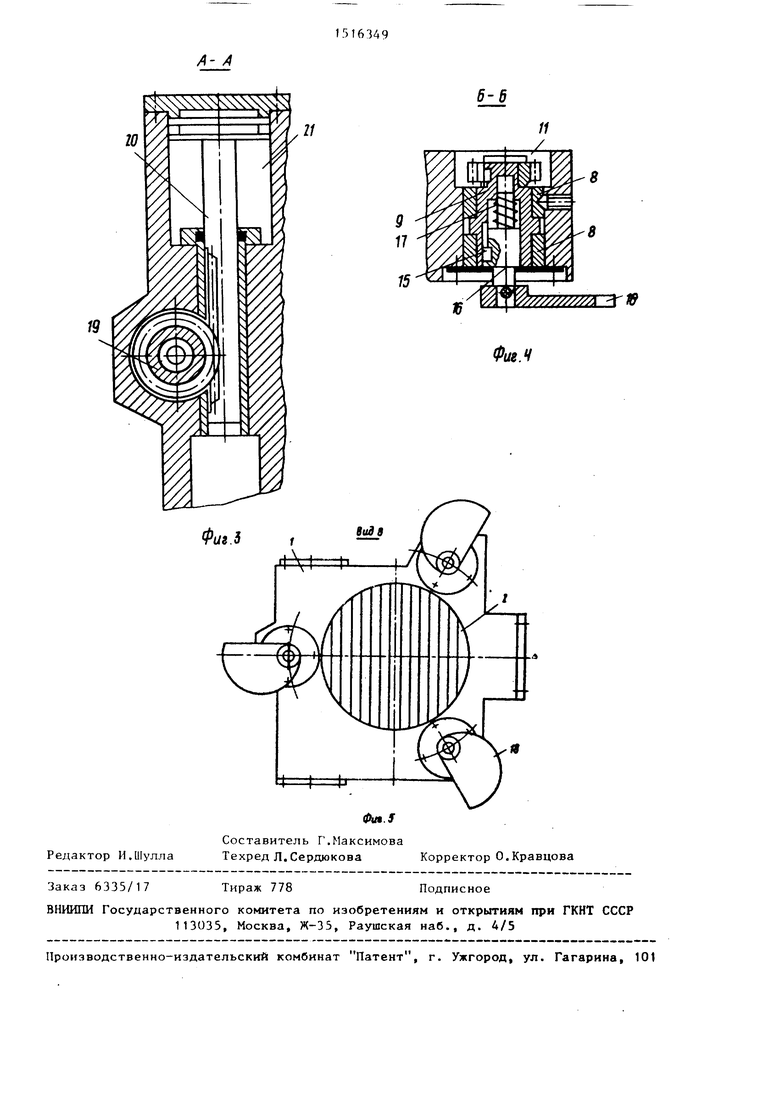
На фиг.1 представлен схват промышленного робота, продольный разрез; на фиг.2 - то же, вид сверху (защитная крышка снята); на фиг.З - разрез Л-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.2; на фиг.З - вид В на фиг.1.
К корпусу 1 из алюминиевого сплава прикреплен неподвижный магнитный блок 2. В корпусе расположен подвижньш блок 3. Магнитные блоки состоят из стальных магнитопроводов 4, между которыми установлены постоянные маг- ниты 5. Подвижньй магнитный блок 3 соединен со штоком 6 силового цилиндра 7 . В корпусе 1 в подшипниках 8 скольжения установлены равномерно расположенные по окружности поворот- ные стаканы 9 и 10. Стаканы снабжены шестернями 11, связанными через паразитные шестерни 12 с центральным зубчатым колесом 13, число зубьев которого, например, кратно 3, установ-, ленным на оси 14, закрепленной в корпусе.
В стаканах 9 и 10 установлены на шпонках 15 с возможностью осевого перемещения валики 16, снабженные пружинами 17. На валиках 16 закреплены кулачки 18. Поворотный стакан 10 снабжен .приводной шестерней 19, сцепленной со шсоком-рейкой 20 второго цилиндра 21. Fla одном из магнитопроводов подвижного магнитного блока 3 закреплен стержень 22, взаимодействующий с двумя контактными устройствами (микропереключателями) 23 и 24. На центральном зубчатом колесе 13 уста- новлен регулируемый упор 25, взаимодействующий с контактным устройством 26. Контактные устройства 23,24 и 26 закреплены в цилиндрическом углублении корпуса 1 . К корпусу 1 прикреплена защитная крышка 27.
Схват промышленного робота работает следующим образом.
Схват, закрепленный на руке робота, подводится сверху к детали (фланец) и останавливается в 1-2 мм от е поверхности. В поршневую полость цилиндра 21 подается сжатьш воздух. Шток-рейка 20, перемещаясь, повора
о
5 0 5 Q
0
0
5
чиваег стакан 10 по часовой стрелке. Посредством шестерен 11 и 12 и цен- тральнот о зубчатого колеса 13 по часовой стрелке поворачиваются и два стакана 9. Вместе со стаканами 10 и 9 поворачиваются валики 16 и кулачки 18, При этом кулачки 18 позиционируют деталь, выставляя ее точно по центру схвата.
После позиционирования детали сжатый воздух подается в штоковую полость цилиндра 21, стаканы 10 и 9 поворачиваются против часовой стрелки, а кулачки 18 возвращаются в исходное положение.
Схват подводится вплотную к детали. Сжатый воздух подается в поршневую полость цилиндра 7, его поршень перемещается влево, перемещая посредством штока 6 подвижный магнитный блок 3 в положение Включено. При этом деталь притягивается к рабочей поверхности неподвижного магнитного блока 2.
Одновременно стержень 22, перемещаясь вместе с подвижным блоком влево, нажимает на контактное устройство 23. Полученный сигнал свидетельствует о включении схвата. После установки детали в патрон станка сжатый воздух подается в штоковую полость цилиндра 7. Подвижный блок 3 перемещается в положение Выключено.
Поверхность подвижного блока 2 размагничивается, освобождая деталь. При этом стержень 22, перемещаясь вправо, нажимает на контактное устройство 24. Полученный сигнал свиде- тельствует об отключении схвата. При случайной встрече одного из кулачков 18 с препятствием, например с кулачком токарного патрона, пружина 17 сжимается, валик 16 перемешается в осевом направлении и кулачок 18 утапливается.
Если при позиционировании заготовки кулачки 18 повернутся на угол больший, чем это необходимо для позиционирования детали наименьшего диаметра, регулируемый упор 25 нажимает на контактное устройство 26. Полученный сигнал свидетельствует о нарушении режима работы, например отсутствии детали на загрузочной позиции.
Формула изобретения I. Схват промьшшенного робота, содержащий корпус с установленными в
515
нем неподвижным и подвижным магнитным блоками и механизм перемещения подвижного блока, отличающийся тем, что, с целью повышения надежности, он снабжен узлом для центрирования детали, выполненном в виде по крайней мере трех поворотных стаканов, расположенных в корпусе равномерно по окружности, кулачков, установленных на подпружиненных осях в каждом из стаканов, и дополни63496
тельного механизма перемещения, кинематически связанного со всеми поворотными стаканами,
2. Схват по п.1, отличающийся тем, что, с целью повышения надежности, на корпусе размещены контактные устройства, взаимодействующие со штырем, закрепленным на под- (0 вижном магнитном блоке, и с регулируемым упором, установленным на центральном зубчатом колесе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Трехкулачковый самоцентрирующий патрон | 1983 |
|
SU1146137A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Устройство для сборки запрессовкой деталей типа вал-втулка | 1986 |
|
SU1333527A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Станок для доводки плоских поверхностей | 1985 |
|
SU1284803A1 |
| Кисть промышленного робота | 1977 |
|
SU621572A1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях захватных органов промышленных роботов. Цель изобретения - повышение надежности за счет центрирования детали на схвате. Для этого в корпусе 1 с установленными в нем неподвижным 2 и подвижным 3 магнитными блоками расположены по окружности поворотные стаканы 10, связанные посредством зубчатых колес 12 с центральным зубчатым колесом 13. В стаканах 10 закреплены кулачки 18. При повороте стаканов 10 происходит поворот кулачков 18, которые позиционируют деталь, выставляя ее точно по центру схвата. В поршневую полость цилиндра 7 подается сжатый воздух, при этом подвижный магнитный блок 3 перемещается и деталь притягивается к рабочей поверхности неподвижного магнитного блока 3. 1 з.п.ф-лы, 5 ил.
/5
7yrj ----w:
Фиг. 5
Редактор И.Шулла
Фм.5
Составитель Г.Максимова
Техред Л.Сердюкова Корректор О.Кравцова
Заказ 6335/17
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
6-6
8
9 17
15
13
Фиг.Ч
Подписное
| Схват промышленного робота | 1981 |
|
SU975395A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
