ч
В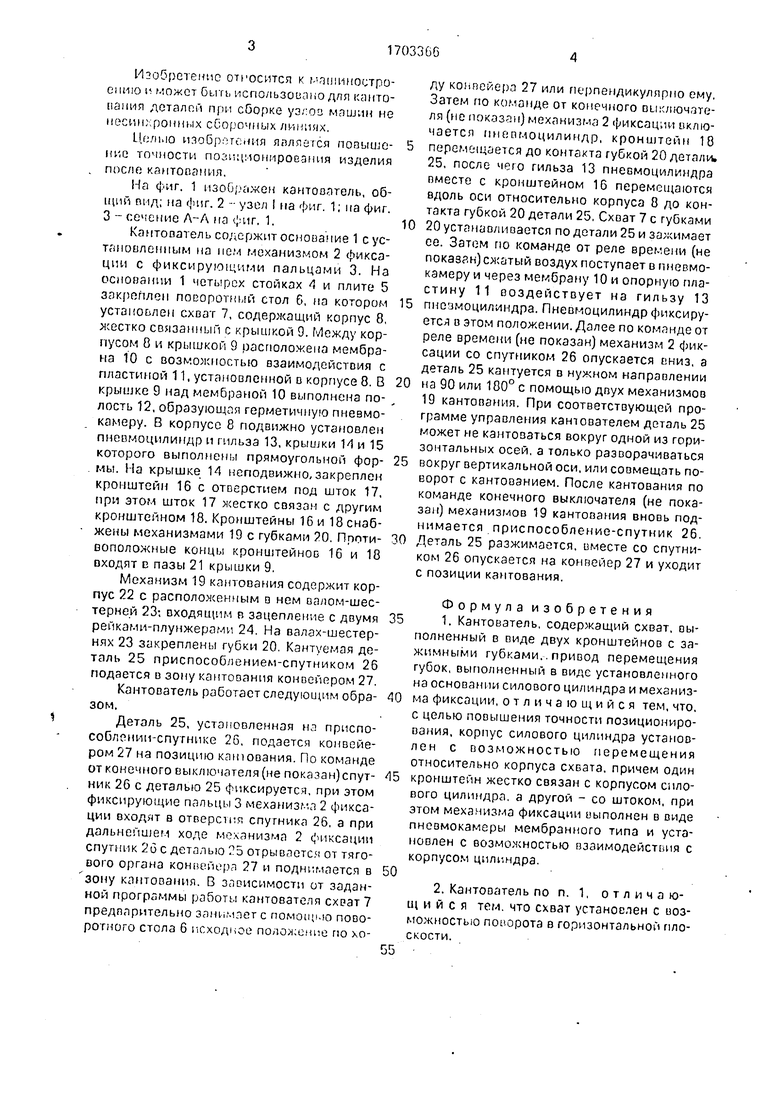
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1761463A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Загрузочное устройство | 1985 |
|
SU1301629A1 |
| Устройство для кантования картонных ящиков | 1984 |
|
SU1177248A1 |
| Устройство для пакетирования кольцеобразных изделий | 1983 |
|
SU1141052A1 |
| Кантователь | 1979 |
|
SU829380A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Поточная линия для обработки кромок стекол | 1990 |
|
SU1728139A1 |
| Устройство для съема с отделочных форм и укладки носочных изделий | 1989 |
|
SU1726605A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
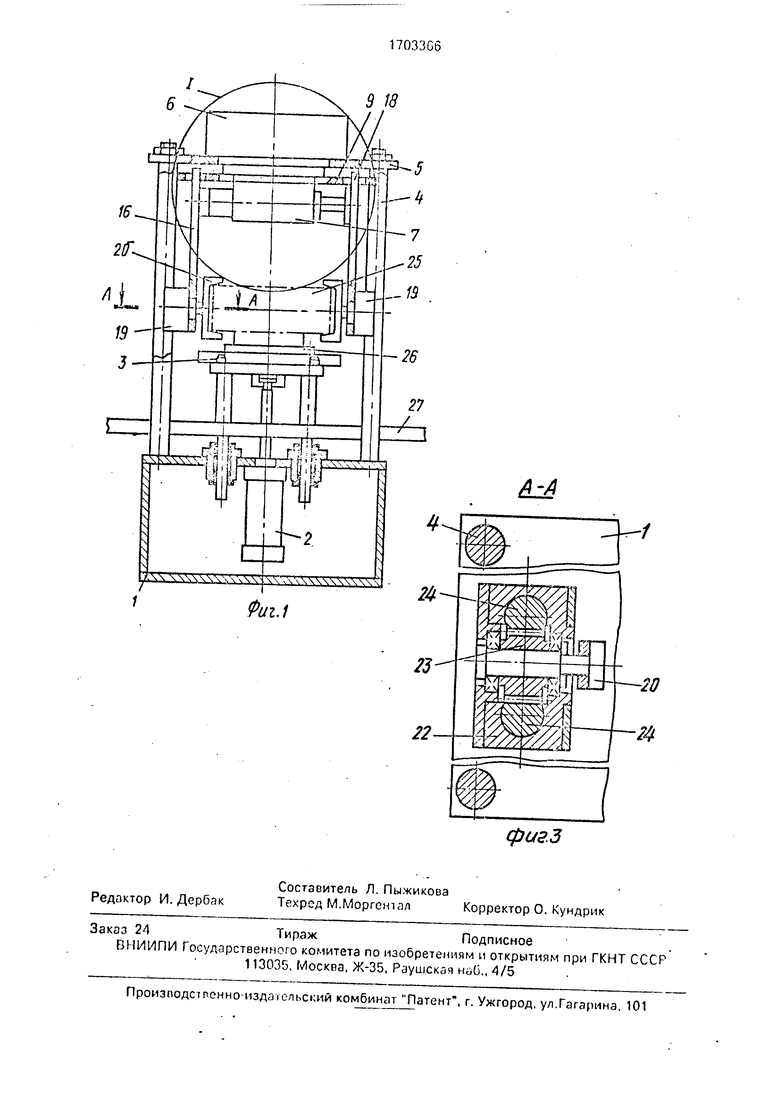
Изобретение относится к станкостроению и может быть использовано для кантования деталей при сборке узлов машин на несинхронных сборочных линиях. Цель изобретения - повышение точности позиционирования изделия после кантовэния. Устройство содержит схват, выполненный в виде кронштейнов 16 и 18 с губками, привод перемещения в виде силового цилиндра, корпус которого установлен с возможностью перемещения относительно корпуса схвата. Кронштейн 16 закреплен жестко с крышкой 14 силового цилиндра, а кронштейн 18 - со штоком 17. 1 з.п. ф-лы. 3 ил.
i №Ещ1 9.
f
Ш
t V-.j- i I I - - л
i №Ещ1 9.
21
О
w
Ш
о
фиг.2
Изобретение относится к машиностроению и может быть использовано для канто- пания деталей при сборке уэ/:оо машин не несинхронных сборочных линиях.
Цолыо изобретения является повышение точности позиционирования изделия после кантопания,
На фиг. 1 изображен кэнтооатель, общий вид; на фиг. 2 - узел I на фиг. 1; па фиг. 3 сечение Л-Л на фиг, 1.
Кантователь содержит основание 1 с установленным на нем механизмом 2 фиксации с фиксирующими пальцами 3. На основании 1 четырех стойках 4 и плите 5 закреплен поворотный стол б, на котором установлен схват 7, содержащий корпус 8, жестко связанный с крышкой 9. Между корпусом 8 и крышкой 9 расположена мембрана 10 с возможностью взаимодействия с пластиной 11, установленной в корпусе 8. В крышке 9 над мембраной 10 выполнена полость 12, образующая герметичную пневмо- камеру. В корпусе 8 подвижно установлен пневмоцилиндр и гильза 13, крышки 14 и 15 которого выполнены прямоугольной формы. На крышке 14 неподвижно, закреплен кронштейн 16 с отверстием под шток 17, при этом шток 17 жестко связан с другим кронштейном 18. Кронштейны 16 и 18 снабжены механизмами 19 с губками 20. Противоположные концы кронштейнов 16 и 18 оходят D пазы 21 крышки 9.
Механизм 19 кантования содержит корпус 22 с расположенным в нем валом-шестерней 23: входящим в зацепление с двумя рейками-плунжерами 24. На валах-шестернях 23 закреплены губки 20. Кантуемая деталь 25 приспособлением-спутником 26 подается в зону кантооания конвейером 27.
Кантователь работает следующим образом.
Деталь 25, установленная на приспособлении-спутнике 26, подается конвейером 27 на позицию канювания. По команде от конечного выключателя (не показан)спут- ник 26 с деталью 25 фиксируется, при этом фиксирующие пальцы 3 механизма 2 фиксации входят в отверстия спутника 26, а при дальнейшем ходе механизма 2 фиксации спутник 26 с деталью 25 отрывается от тягового органа конвейера 27 и поднимается в зону кантооания. В зависимости от заданной программы работы кантователя схват 7 предварительно занимает с помощмо поворотного стола 6 исходное положение по ходу конвейера 27 или перпендикулярно ему. Затем по команде от конечного выключателя (не показан) механизма 2 фиксации включается пнепмоцилиндр, кронштейн 18
перемещается до контакта губкой 20 детали, 25, после чего гильза 13 пневмоцилиндра вместе с кронштейном 16 перемещаются вдоль оси относительно корпуса 8 до контакта губкой 20 детали 25, Схват 7 с губками
20 устанавливается по детали 25 и зажимает ее. Затом по команде от реле времени (не показан) сжатый воздух поступает в пневмо- камеру и через мембрану 10 и опорную пластину 11 воздействует на гильзу 13
пнозмоцилиндра. Пневмоцилиндр фиксируется в этом положении. Далее по команде от реле времени (не показан) механизм 2 фиксации со спутником 26 опускается вниз, а деталь 25 кантуется в нужном направлении
на 90 или 180° с помощью двух механизмов 19 кантования. При соответствующей программе управления канювателем деталь 25 может не кантоваться вокруг одной из горизонтальных осей, а только разворачиваться
вокруг вертикальной оси, или совмещать поворот с кантованием. После кантования по команде конечного выключателя (не показан) механизмов 19 кантования вновь поднимается приспособление-спутник 26.
Деталь 25 разжимается, имеете со спутником 26 опускается на конвейер 27 и уходит с позиции кантования.
Формула изобретения
кронштейн жестко связан с корпусом силового цилиндра, а другой - со штоком, при этом механизма фиксации выполнен в виде лневмокамеры мембранного типа и установлен с возможностью взаимодействия с корпусом цилиндра.
5
9 W
| Кантователь | 1978 |
|
SU844211A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
