(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Установка для накопления кирпичей с зазором | 1985 |
|
SU1284836A1 |
| АВТООПЕРАТОР | 1972 |
|
SU347161A1 |
| ВСЕСОЮЗНАЯ Iшшно-кх>&;;г:г ?(4БИБЛИО^Т(<Д J | 1972 |
|
SU349509A1 |
| Установка для накопления кирпичей с зазором | 1986 |
|
SU1402432A2 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Вайма для сборки деревянных рам | 1977 |
|
SU791540A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
1
Изобретение относится к машиностроению, а именно к автооператорам, предназначенным для обслуживания технологического оборудования, в частности для кузнечноштамповочных машин.
Известен автооператор, предназначенный для обуслуживания технологического оборудования, в котором содержится механическая рука с захватом, накопитель и устройство подачи деталей на позицию захвата 1, выполненное в виде кулачка, упруго связанного с шибером 2.
Недостатком указанных автооператоров является то, что они не имеют широких технологических возможностей.
Наиболее близким решением к предлагаемому является автооператор, содержаш,ий механическую руку с захватом и с валом, связанную с приводным валом, на котором установлен кулачок механизма поворота, кинематически связанный через предохранительное устройство с валом руки, накопитель с лотком и шибером, и устройство подъема и опускания руки 3.
Недостаток автооператора заключается в том, что он имеет довольно сложное конструктивное исполнение.
Цель изобретения - расширение технологических возможностей и упрошение конструкции.
Указанная цель достигается тем, что устройство подачи деталей выполнено в виде кривошипно-кулисного механизма, кривошип которого закреплен на приводном валу, а кулиса связана с шибером накопителя, при этом предохранительное устройство выполнено в виде рычагов, шарнирно установленных на обш,ей оси и подпружиненных между
10 собой, а один из таких рычагов связан с кулачком механизма поворота, а другой - с валом руки.
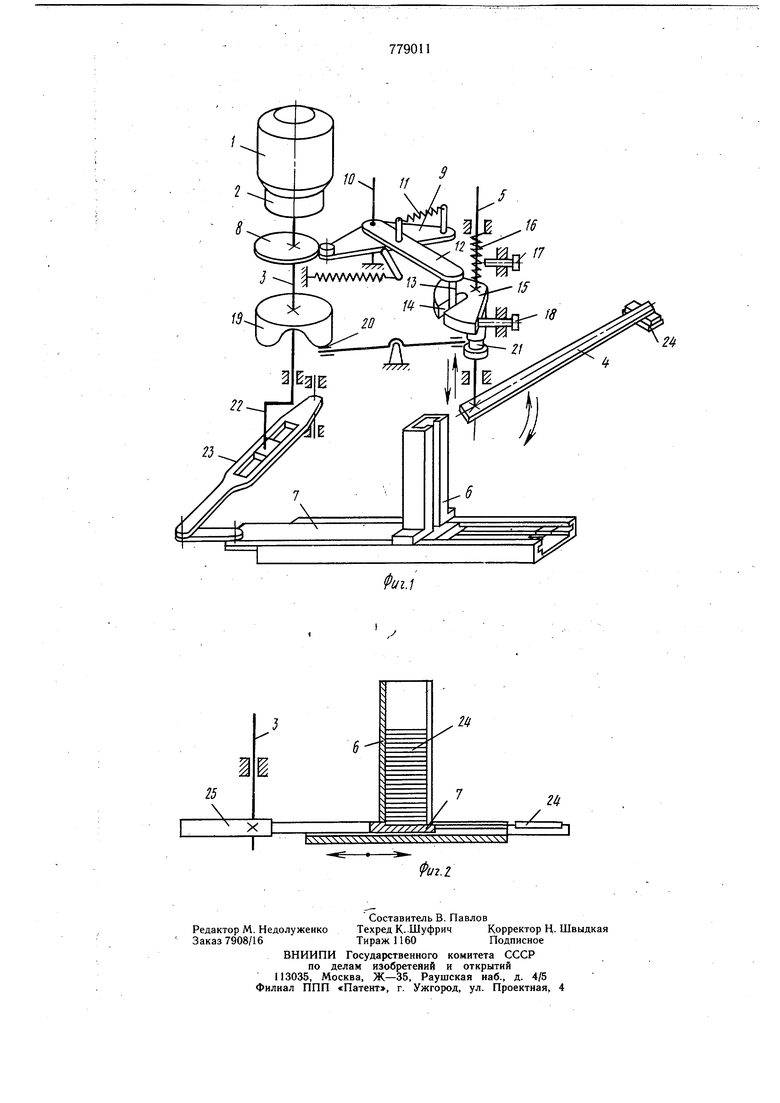
На фиг. 1 изображена кинематическая 5 схема автооператора; на фиг. 2 - вариант исполнения механизма подачи деталей.
Автооператор состоит из электродвигателя 1, редуктора 2 со сменными шестернями для изменения цикла работы, приводного вала 3, механической руки 4 с валом 5, 20 механизма поворота руки, предохранительного механизма, механизма подъема и опускания руки, механизма подачи деталей на позицию захвата и накопительного лотка 6 с шибером 7. Механизм поворота руки выполнен в виде кулачка 8, укрепленного на приводном валу 3 и кинематически связанного через предохранительный механизм с валом 5 руки 4. Кулачок 8 взаимодействует с рычагом 9, свободно установленным на оси 10 и связанным через пружину 11 с рычагом 12, который также свободно установлен на оси 10. На плече рычага 12 закреплен палец 13, свободный конец которого расположен в пазу 14 вильчатого рычага 15, смонтированного на валу 5 и подпружиненного пружиной 16 в сторону опускания руки 4. Поворот руки 4 ограничен упорами 17 и 18. Механизм подъема и опускания руки 4 выполнен в виде пазового кулачка 19, укрепленного на приводном валу 3 и взаимодействующего с двуплечим рычагом 20, одно плечо которого расположено в кольцевой канавке 21 вильчатого рычага 15. Механизм подачи деталей на позицию захвата может быть выполнен либо в виде кривошипно-куличного механизма, кривошип 22 которого закреплен на приводном валу 3, а кулиса 23 кинематически связана с шибером 7 накопительного лотка 6 с деталями 24, либо в виде кулачка 25, закрепленного на приводном валу 3 и упруго взаимодействуюш.его с шибером 7. Автооператор работает следующим образом. Вращение от электродвигателя 1 через редуктор 2 передается приводному валу 3. При повороте вала 3 кулачок пойорачивает рычаги 9 и 12 вокруг оси 10. Рычаг 12 пальцем 13 взаимодействует с вильчатым рычагом 15, поворачивая при этом вал 5 и руку 4 до упора 17. При этом усилие от поворота руки 4 не превышает усилие сжатия пружины 11. Во время поворота руки 4 до упора 17, кривошип 22 кулисой 23 перемещает шибер 7 в конечное положение, обеспечивая при этом подачу детали 24 из накопительного лотка 6 на позицию захвата. При повороте руки 4 и перемещении детали 24 на позицию захвата рычаг 20 одним плечом обкатывает кулачок 19 по горизонтальной плоскости. Как только рука 4 заканчивает угловое перемещение это же плечо рычага 20 переходит с горизонтальной плоскости на плоскость перепада кулачка 19, рука 4 совершает вертикальное перемещение к детали 24. После захвата детали 24 происходит подъем руки 4 и ее поворот до упора 17, при этом щибер перемещается в исходное положение. Затем цикл повторяется. Формула изобретения Автооператор, содержащий механическую руку с захватом и с валом, связанную с приводным валом, на котором установлен кулачок механизма поворота, кинематически связанный через предохранительное устройство с валом руки, накопитель с лотком и щибером и устройства подъема, опускания руки и подачи деталей на позицию захвата, отличающийся тем, что, с целью расщирения технологических возможностей и упрощения конструкции, устройство подачи деталей выполнено в виде кривошипно-кулисного механизма, кривощип которого закреплен на приводном валу, а кулиса связана с шибером накопителя, при этом предохранительное устройство выполнено в виде рычагов, щарнирно установленных на общей оси и подпружиненных между собой, а один их этих рычагов связан с кулачком механизма поворота, другой же - с валом руки. Источники информации, принятые во внимание при экспертизе 1.Волчкович Л.И., Усов Б. А. Автооператоры, М., «Мащиностроение, 1974, с. 83, 84, р. 34. 2.Авторское свидетельство СССР № 169383, кл. В 23 Q 7/06, 22.02.63. 3.Авторское свидетельство СССР № 582085, кл. В 23 Q 7/04, 31.08. 76.
