(54) СХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1985 |
|
SU1255428A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Схват промышленного робота | 1980 |
|
SU895650A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, например для автоматизашга технологических процессов в горячештампоБОчном производстве.
Известен охват промышленного робота, предназначенный для автоматизации технологических процессов, на корпусе которого шарнирно установлены губки, снабженные приводом l Наиболее близок к, предлагаемому изобретению схват промышленного робота, на; корпусе которого шарнирно смонтированУ губки, соединенные с приводом зубчатореечной передачей,2.
Известные схваты имеют узкие технологические возможности.
Цель изобретения - расширение технологических возможностей.
Для этого в предлагаемом схвате одна из rj6oK снабжена механизмом заклинивания, кинематически связанным с рейкой, и связана с упорным штифтом, закрепленным на шестерте, установленной на корпусе соосно этой губке.
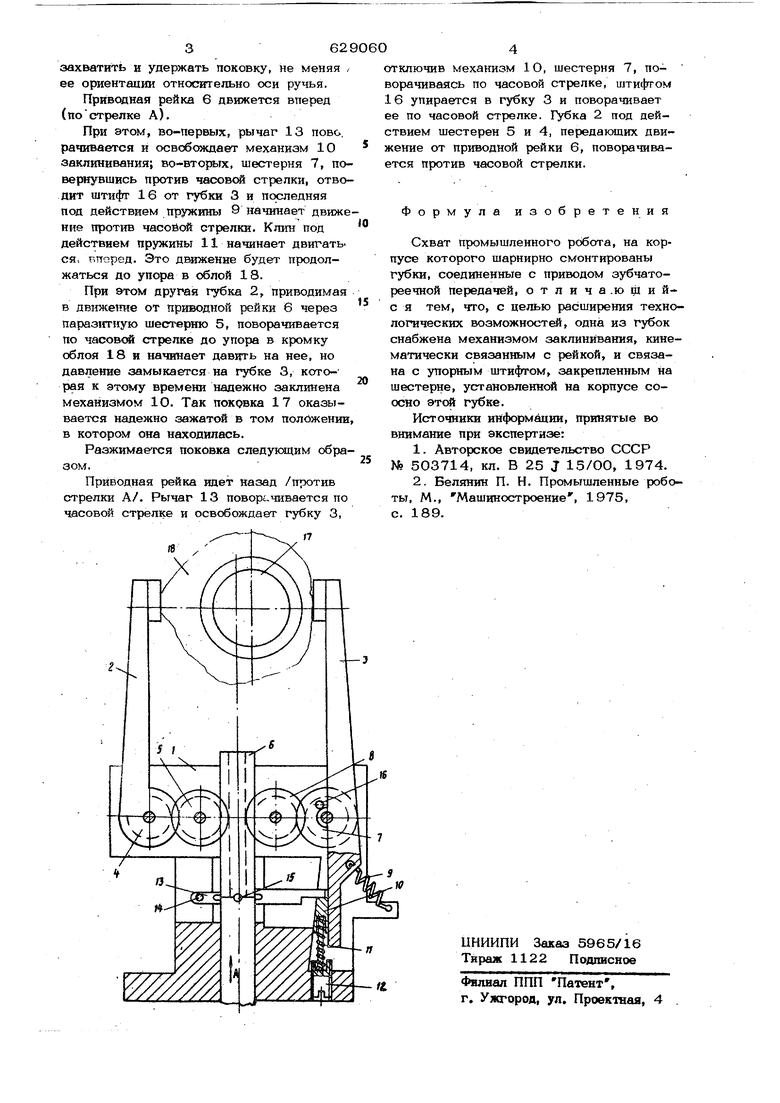
На чертеже дана принципиальная схема описываемого схвата.
На корпусе 1 схвата шарнирно установлень губки 2 и 3, причем губка 2 через шестерню 4 и паразитную шестерню 5 введена в зацепление с приводной рейкой 6. Другая губка 3 свободно сидит на оцном валу с шестерней ,7, Которая через паразитную шестерню 8 также введена н зацепление с приводной рейкой 6. 3 пружиной 9 сцеплена с кронштейном корпуса 1. В пространстве межау губкой3 и корпусом 1 установлен механизм 10 заклинивания, содержащий клин, пружину 11 и регулировочный винт 12. На корпусе 1 смонтирован рычаг 13 управления механизмом 10, соединенный с помощью оси 14с корпусом 1 и с помощью оси 15 с приводной рейкой 6. На шестерне 7 установлен штифт 16. В пространстве между губками 2 и 3 располагается обрабатываемая поковка 17с облоем 18. При позиционировании схвата относительно поковки 17, облой 18 отстоит от осе схвата на разных расстояниях. Tpe6yeTcii
