(Л
tc
СП
оо ю
Ри.г.
Изобретение относится к машиностроению и может быть использовано Как зажимное устройство в роботах- манипуляторах.
Цель изобретения - расширение функциональных возможностей схвата и сокращение времени транспортировки детали роботом.
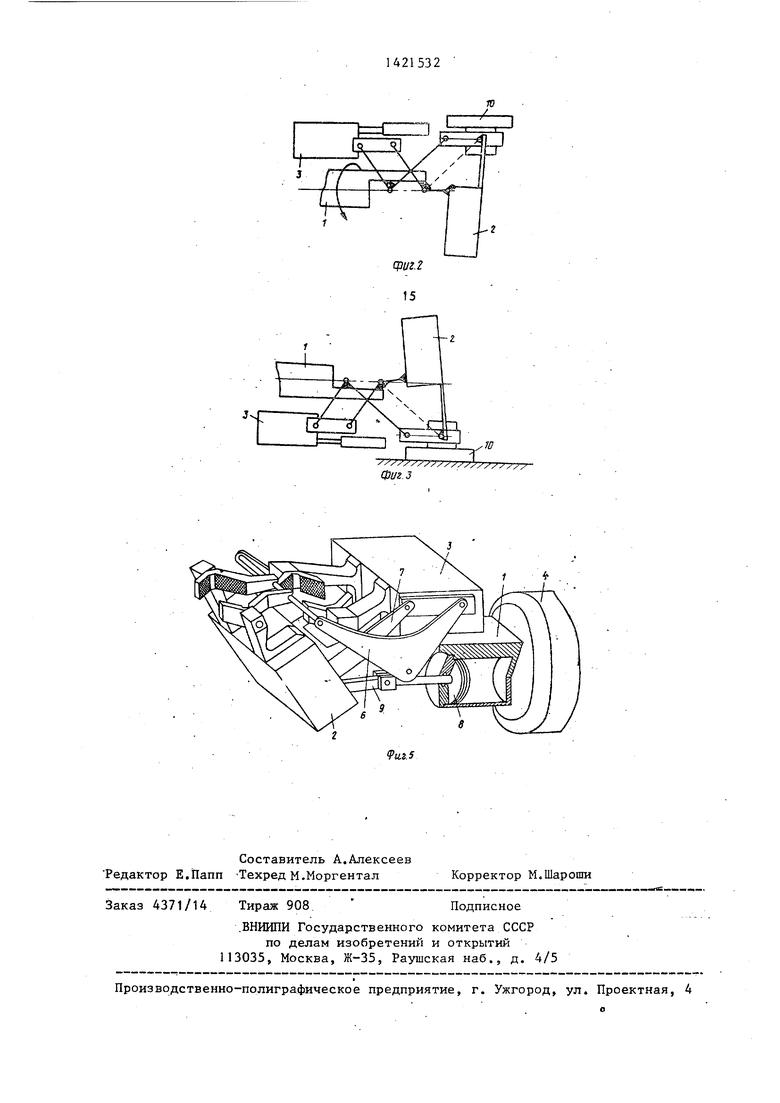
На фиг.1-3 показана принципиаль- .ная схема работы спаренного схвата с механизмом кантовки (фиг.1 - исходное положение кисти, деталь захвачена захватным устройством кисти, фиг.2 - устройство кисти переместило деталь, захватное устройство ушло из рабочей зоны, фиг.З - переворот дета- :ли поворотным УСТРОЙСТВОМ манипуля- тора, кисть осуществила операцию канКисть работает следующим образом. . Деталь 10 захватывается одний из захватйых устройств. При подаче воздуха в цилиндр корпуса 1 поршень 8, шарнирно. связанный с захватным устройством 2, через тягу 9 поворачивает его вокруг оси 5 на некоторьй угол. Одновременно спаренные параллелограм Q мы, жестко связанные между собой, боковые стороны которьпс образованы рычагами 6 и 7, перемещают захватное устройство 3, шарнирно соединенное с ними, т.е. осуществляется увод зах15 ватного устройства 3 из рабочей зоны захватного устройства 2,
Формула изобретения Кисть манипулятора, содержащая два
товки); на фиг.4 - кисть манипулятора,2о захватных устройства, размещенных на общий вид, исходное положение; на корпусе, и механизм поворота захват- фиг, 5 - то же, после действия меха- ных устройств, отлич ающая- низма поворота захватных устройств. На корпусе 1 установлено захватс я тем, что, с целью расширения
технологических возможностей, она ное устройство 2, спаренное с захват- 25 снабжена двумя ломаными двуплечими нь5м устройством 3.
Кисть жестко крепится к руке манипулятора через устройство 4 ротации и состоит из корпуса 1, на котором
рычагами, шарнирно установленными на корпусе, причем плечи этих рычагов являются параллельными звеньями двух шарнирнб-параллелограммных мехаКисть работает следующим образом. . Деталь 10 захватывается одний из захватйых устройств. При подаче воздуха в цилиндр корпуса 1 поршень 8, шарнирно. связанный с захватным устройством 2, через тягу 9 поворачивает его вокруг оси 5 на некоторьй угол. Одновременно спаренные параллелограмQ мы, жестко связанные между собой, боковые стороны которьпс образованы рычагами 6 и 7, перемещают захватное устройство 3, шарнирно соединенное с ними, т.е. осуществляется увод зах5 ватного устройства 3 из рабочей зоны захватного устройства 2,
Формула изобретения Кисть манипулятора, содержащая два
захватных устройства, размещенных корпусе, и механизм поворота захв ных устройств, отлич ающая
с я тем, что, с целью расширения
технологических возможностей, она снабжена двумя ломаными двуплечими
рычагами, шарнирно установленными на корпусе, причем плечи этих рычагов являются параллельными звеньями двух шарнирнб-параллелограммных меха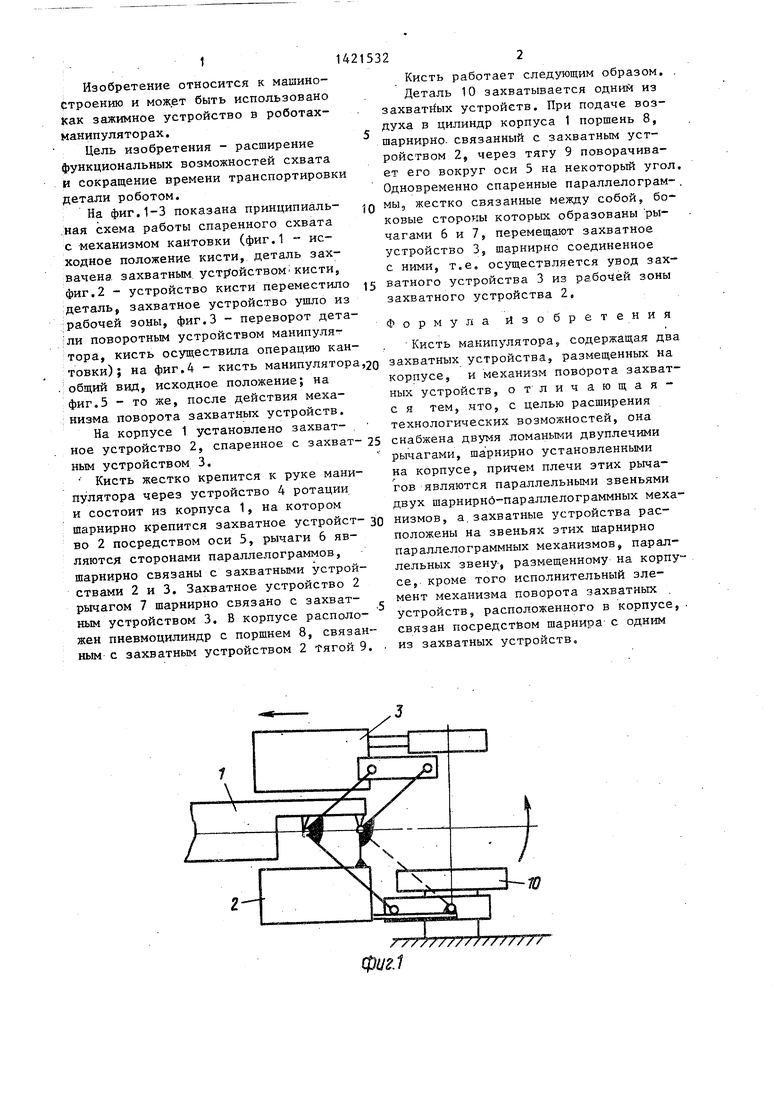
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть манипулятора | 1987 |
|
SU1437217A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Схват промышленного робота | 1989 |
|
SU1749020A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1987 |
|
SU1473944A1 |
| Схват манипулятора | 1987 |
|
SU1553378A1 |
Изобретение относится к области машиностроения и может быть использовано как зажимное устройство в роботах-манипуляторах. Целью изобретения является расширение технологических возмо жностей схвата и сокращение времени транспортировки детали роботом. Деталь захватывается одним из захватных устройств. При подач.е воздуха в цилиндр корпуса 1 поршень 8, шарнирно связанный с захватным устройством 2 через тягу 9, поворачивает его вокруг ос-и 5 на некоторый угол. Одновременно спаренные параллелограммы, жестко связанные между собой, боковые стороны которых образованы рычагами 6 и 7, перемещают захватное устройство 3, т.е. осуществляется увод захватного устройства 3 из рабочей зоны захватного устройства 2. 5 ил.
шарнирно крепится захватное устройст- ЗО низмов, а. захватные устройства расво 2 посредством оси 5, рычаги 6 являются сторонами параллелограммов, шарнирно связаны с захватными устройствами 2 и 3. Захватное устройство 2 рычагом 7 шарнирно связано с захватным устройством 3, В корпусе расположен пневмоцилиндр с поршнем 8, связанным с захватным устройством 2 тягой 9.
положены на звеньях этих шарнирно параллелограммных механизмов, параллельных звену, размещенному на корпусе,, кроме того исполнительный элемент механизма поворота захватных устройств, расположенного в корпусе, . связан посредством шарнира- с одним из захватных устройств.
l
--
,,,,,
3-Й7
,,,,,,,,,.,,,.,..,.,.,,„5,.,
сЕжа
G
5
фиг.з
| Рука манипулятора | 1984 |
|
SU1247265A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
